基于电动助力转向的车道保持系统*
2013-09-03 10:06:20张海林罗禹贡江青云李克强
汽车工程 2013年6期
张海林,罗禹贡,江青云,李克强
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
据统计,近40%的致命交通事故是由于车道偏离造成的[1]。车道保持系统的功能在于能够使车辆维持在正确的车道上,保证驾驶员的行车安全。
电动助力转向(electric power steering,EPS)系统具有节能和结构简单等一系列优点,基于EPS的车道保持系统能够实现EPS系统的结构共用,降低车道保持系统设计成本。
在基于EPS的车道保持系统中,EPS既是常规助力转向部件,又是车道保持执行部件。二者之间的协调控制是研究的关键。
文献[2]和文献[3]中研究了基于EPS的车道保持系统,但均未涉及EPS作为常规助力转向部件与车道保持执行部件之间的协调问题。文献[4]中为车道保持系统单独设计了转向机构,该机构无常规助力功能,不存在协调控制问题。
针对上述协调控制问题,提出一种综合考虑跨道时间[1]与驾驶员操作行为判断的车道保持协调控制方法。该方法结合了跨道时间计算与驾驶员操作状态判断方法。在此基础上,搭建了车道保持模型、魔术轮胎模型、7自由度整车模型和EPS模型,并进行仿真。随后在EPS实验台上进行车道保持协调控制硬件在环实验。仿真及硬件在环实验结果表明,所设计的车道保持协调控制方法能够通过判断驾驶员行为和车辆状态,决定EPS是实现常规助力转向还是响应来自车道保持控制器的命令,实现二者协调控制,确保行车安全。
1 基于EPS的车道保持系统总体结构
驾驶员在车辆行驶过程中拥有最高的优先级,因此在设计控制策略时必须考虑驾驶员的操作行为。通过综合判断跨道时间与驾驶员操作行为,决定EPS是工作在常规助力模式下,还是响应来自车道保持控制器的命令,实现协调控制。
基于上述思想,本文中建立了基于EPS的车道保持系统的总体结构,如图1所示。虚线框内是车道保持控制系统。路面环境信息和驾驶员信息输入给整车模型,经过计算后得到车辆的状态参数。结合之前的路面信息和驾驶员输入信息,通过综合驾驶员行为和跨道时间来判断车辆是否有发生车道偏离的危险。如果有发生车道偏离的危险,通过侧向驾驶员模型计算得到转角命令,再通过PID得到PWM信号,由助力电机执行,产生相应的前轮转角,使车辆维持在车道线之间;如果没有发生车道偏离的危险,EPS系统工作在常规助力模式下。
2 车道保持协调控制方法
在车道保持的过程中,首先须综合各方面信息判断车辆是否有偏离车道的危险,本文中通过判断驾驶员操作行为与基于跨道时间的报警算法来判定是否有车道偏离的危险。
基于跨道时间(time to lane cross,TLC)的报警算法,是通过建立车辆运动模型,预测车辆的行驶轨迹,计算车轮接触到车道边缘所需要的时间,即跨道时间。当该时间小于特定阈值时,就进行报警。
车道保持协调控制算法流程如图2所示。从图2中可知,当驾驶员正在操作转向盘时,驾驶员具有最高的优先级,此时EPS工作在常规助力模式下。当驾驶员未操作转向盘时,此时若跨道时间大于阈值,则认为车辆未偏离车道,此时不实施辅助功能;若跨道时间小于设定阈值,则认为有车道偏离危险,通过侧向驾驶员模型计算得到目标转角,目标转角与转向盘实际转角的差通过PID控制器后得到PWM信号,由助力电机来执行,使车辆维持在两车道线之间。
从图2可看出,驾驶员操作状态判断在车道保持协调控制中具有重要地位。本文中通过转矩信号来判断驾驶员的操作状态,具体判断流程见图3。
系统首先从转矩传感器获得转矩信号,当转矩大于设定阈值时,认为驾驶员正在操作车辆。当转矩小于设定阈值时,如果转矩小于阈值的时间大于某个设定的阈值,认为驾驶员未在操作车辆,否则认为驾驶员正在操作车辆。
3 车道保持系统仿真模型
在Matlab/Simulink环境下,搭建基于EPS的车道保持系统仿真模型,其框图如图4所示。
7自由度整车模型从EPS模型获取前轮转角,将回正力矩与车速传递给EPS模型;辅助模式判断模型综合驾驶员操作与跨道时间信息,决定EPS工作在常规助力模式还是车道保持模式。若系统处于车道保持模式,侧向驾驶员模型计算得到目标转向盘转角,输入给EPS模型,完成整个控制过程。
3.1 车辆模型
选取车辆纵向、侧向、横摆和4个车轮转动总共7个自由度,建立7自由度整车模型。
整车模型如图5所示,参数列于表1。
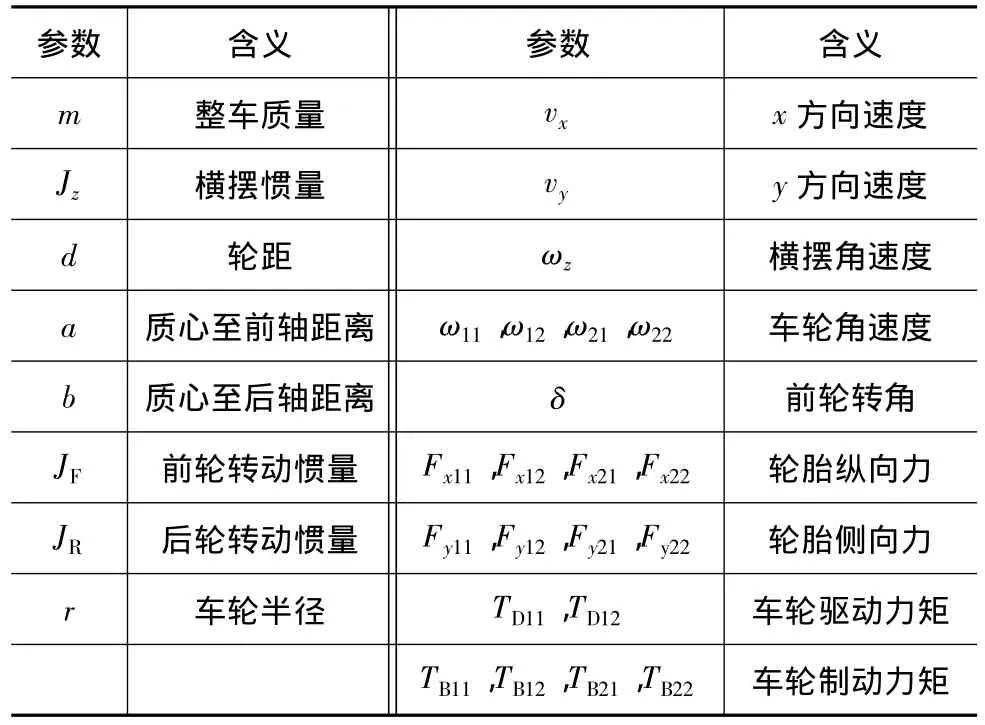
表1 7自由度整车模型参数含义
7自由度整车模型微分方程为
3.2 轮胎模型
采用魔术轮胎模型[5],其一般公式为
式中:D为峰值因子;C为形状因子;B为刚度因子;E为曲率因子;Sh为横向补偿量;Sv为纵向补偿量;y(x)代表纵向力、侧向力或回正力矩。
3.3 侧向驾驶员模型
采用单点预瞄驾驶员模型[6-7]。模型示意图见图6。
图6中xoy为固定坐标系,f(t)为预期的轨迹中心线方程,T为预瞄时间,y(t)为车辆当前坐标。
为跟踪f(t),最优的转向盘转角为
式中:δ为最优转向盘转角;i为转向系传动比;L为轴距;d为预瞄距离。
在车道保持控制过程中,若发生车道偏离,给定车道中心线及相关参数,通过上述侧向驾驶员模型可以计算得到目标转向盘转角,根据目标转向盘转角与实际转向盘转角的差值,通过PID控制器后得到PWM信号,由助力电机执行,完成车道保持过程。
3.4 EPS 系统模型[8-9]
转向管柱助力式EPS结构如图7所示,EPS系统模型参数均标注于图7中,参数含义列于表2。
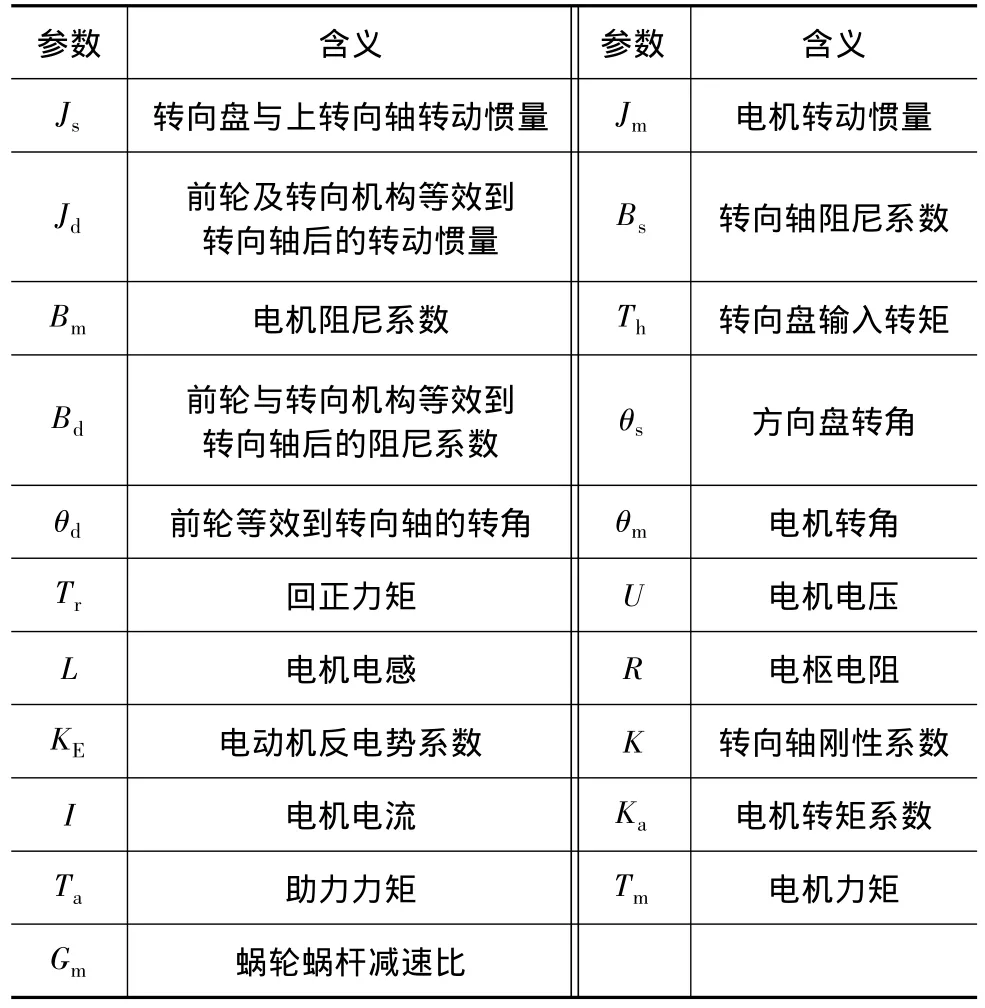
表2 EPS模型参数含义
转向系动力学方程为
直流电机的电压方程为
电机的动力学方程为
综合式(4)~式(6)便可对转向系统动力学进行求解,得到相关参数,以便进一步求解。
4 车道保持硬件在环实验平台
在仿真基础上,搭建硬件在环实验平台,如图8所示。
硬件在环实验平台由Dspace系统、EPS实验台和电机驱动模块组成。Dspace系统运行所搭建的基于EPS的车道保持系统模型。Dspace从EPS实验台采集转矩和转角信号,从电机驱动电路采集电流信号,输入给系统内部正在运行的模型,经过一系列运算后,输出PWM信号,驱动电机动作,改变前轮转角,控制车辆行驶轨迹。
5 仿真与实验结果分析
EPS系统中电动助力效果会随车速的增大而减弱。为兼顾助力效果和车道保持效果,选择车速工况为20km/h。
5.1 仿真结果分析
仿真工况1:直线行驶工况,车速20km/h,地面附着系数0.9,车道宽3.5m,跨道时间阈值3.5s。驾驶员转角输入、跨道时间和电机电压情况如图9所示。
由图可见:从3~4.3s(虚线椭圆框部分),存在驾驶员输入,电机提供常规助力,电机电压在3~4.3s之间呈现常规助力状态;在4.3s之后,驾驶员没有输入,跨道时间小于3.5s,电机开始动作,调整车辆位置;跨道时间大于3.5s,电机基本不工作,不提供辅助功能。控制方法达到协调控制效果。
车辆质心轨迹控制结果如图10所示。当车辆有偏离车道的危险时,系统进行接管,将车辆质心控制在车道中心线附近,确保车辆安全。
仿真工况2:弯道行驶工况,车速20km/h,地面附着系数0.9,车道宽3.5m,跨道时间阈值3.5s。
驾驶员转角输入、跨道时间和电机电压情况如图11所示。
由图可见:从0~1.5s(虚线椭圆框部分),存在驾驶员输入,电机电压呈现常规助力状态;1.5s后,驾驶员没有输入,跨道时间小于3.5s,电机开始动作,调整车辆轨迹;跨道时间大于3.5s,电机基本不工作,无辅助功能。控制方法达到了协调控制效果。
车辆质心轨迹控制结果如图12所示。
当车辆发生偏离时,系统能够及时纠正车辆位置,保证行车安全,验证了所设计的车道保持控制方法的有效性。
5.2 硬件在环实验结果分析
硬件在环实验过程中,驾驶员处于未操作状态时,手完全脱离转向盘;驾驶员处于操作状态时,手扶在转向盘上进行操作。
硬件在环工况1:直线行驶工况,车速20km/h,地面附着系数0.9,车道宽3.5m,跨道时间阈值3.5s。
硬件在环仿真实验中车辆质心轨迹控制结果见图13。由图可见,当车辆发生车道偏离时,系统能够将车辆调整到车道中心线附近,符合预期效果。
图14示出硬件在环实验过程中,车辆各参数的变化情况。由图可见:从3.5~4.5s(虚线椭圆框部分),转矩超出了所设定的阈值,根据图3判断驾驶员处于操作状态;4.5s后,转矩小于所设定的阈值,并持续一定时间,根据图3判断驾驶员处于未操作状态。从3.5~4.5s,驾驶员存在操作,此时EPS工作在常规助力模式,表现为电机存在助力电流。之后,驾驶员无操作,系统进入到车道保持阶段,跨道时间小于设定阈值时,电机开始动作,通过改变前轮转角纠正车辆位置;跨道时间大于设定阈值时,电机中几乎没有电流,系统无辅助功能。结果表明,所设计的控制方法达到了协调控制的效果。
硬件在环工况2:弯道行驶工况,车速20km/h,地面附着系数0.9,车道宽3.5m,跨道时间阈值3.5s。车辆质心轨迹控制结果如图15所示。
在弯道行驶工况下,偏离车道情况发生时,系统能够及时调整车辆位置,维持车辆在车道中心线附近,验证了控制方法的有效性。
图16示出硬件在环实验过程中,车辆各参数的变化情况。由图可见:从0.5~1.5s(虚线椭圆框部分),转矩超出了所设定的阈值,根据图3判断驾驶员处于操作状态;1.5s后,转矩小于所设定的阈值,并持续一定时间,根据图3判断驾驶员处于未操作状态。从0.5~1.5s,驾驶员有操作,此时EPS工作在常规助力模式,表现为电机存在助力电流。1.5s后,驾驶员无操作,系统进入到车道保持阶段,跨道时间小于设定阈值时,电机通电,改变前轮转角,调整车辆轨迹;跨道时间大于设定阈值时,系统不提供辅助功能。验证所设计的控制方法具有协调控制效果。
6 结论
针对基于电动助力转向的车道保持系统中的协调控制问题,提出了一种综合考虑跨道时间与驾驶员操作行为判断的车道保持协调控制方法。在此基础上,开发了车道保持综合仿真平台,对控制方法进行仿真,并针对相应的仿真工况进行了硬件在环实验,得到如下结论。
(1)所设计的车道保持协调控制方法综合了驾驶员操作状态与车道偏离信息,能够解决EPS作为常规助力转向部件与车道保持执行部件之间的协调控制问题,同时保证驾驶员在驾驶过程中拥有最高的优先级,符合现实情况。
(2)通过整合侧向驾驶员模型、7自由度车辆模型、魔术轮胎模型和EPS系统模型建立了完整的基于EPS的车道保持系统仿真模型。该模型能够较好地模拟车道保持过程中车辆的动态特性。
(3)仿真和硬件在环实验结果表明,所设计的车道保持协调控制方法能将车辆维持在两车道线中间,保证行车安全,具有良好的控制效果。
[1]王荣本,余天洪,郭烈,等.基于机器视觉的车道偏离警告系统研究综述[J].汽车工程,2005,27(4):463-466.
[2]Liu Jingfu,Wu Juihung,Su Yifeng.Development of an Interactive Lane Keeping Control System for Vehicle[C].IEEE Vehicle Power and Propulsion Conference,2007:702-706.
[3]Tilo Meister,Reidar Fleck,Marcus Fischer.Enabling Technolo-gies for Lateral Dynamic Assistant Systems[C].SAE Paper 2006-01-1172.
[4]马莹,王建强,徐友春,等.智能车辆车道保持系统[J].ITS通讯,2004(Z1):7-12.
[5]Hans B Pacejka.Tyre and Vehicle Dynamics[M].Oxford:Elsevier,2006:172-196.
[6]郭孔辉.汽车操纵动力学[M].长春:吉林科学技术出版社,1991:500-503.
[7]郭孔辉.驾驶员-汽车闭环系统操纵运动的预瞄最优曲率模型[J].汽车工程,1984(3):1-16.
[8]Yasuo Shimizu,Toshitake Kawai.Development of Electric Power Steering[C].SAE Paper 910014.
[9]胡建军,李彤,秦大同.基于整车动力学的电动助力转向系统建模仿真[J].系统仿真学报,2008,20(6):1577-1581.
猜你喜欢
卫星应用(2021年11期)2022-01-19 05:13:02
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
科学大众(2021年9期)2021-07-16 07:02:50
中国交通信息化(2020年11期)2021-01-14 03:30:34
解放军健康(2017年5期)2017-08-01 06:27:42
自动化学报(2017年4期)2017-06-15 20:28:55
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
中国交通信息化(2015年10期)2015-06-06 06:39:31
交通建设与管理(2015年13期)2015-03-20 15:18:48
电网与清洁能源(2015年2期)2015-02-28 16:03:08