驾驶员姿势舒适性评价的研究*
2013-09-06 01:18:14陈景辉任金东陆善彬杜晓明
汽车工程 2013年6期
陈景辉,任金东,陆善彬,杜晓明
(1.一汽技术中心,长春 130022; 2.吉林大学汽车工程学院,长春 130025)
前言
随着我国道路和桥梁等基础设施的不断完善,路况有了大幅度的改观,路面不平度经车轮、车身和座椅传递给乘员的振动已大大减小,由于路面不平激励引起的汽车驾驶员不舒适问题已经不突出,而姿势不舒适及其导致的疲劳和损伤一直是困扰驾驶员的问题,并已经成为主要矛盾,因此,根据对驾驶姿势不舒适度的评价来优化设计方案是非常必要的。驾驶员姿势舒适性是关系驾驶员工作负荷、疲劳和健康甚至是安全行车的重要内容,是驾驶员人机界面设计中需要考虑的重要因素,因此,准确地评价姿势的舒适性至关重要。
姿势舒适性可分为静态姿势舒适性和动态姿势舒适性两种。前者指的是在某种姿势下全身的舒适性,后者则是在一定操作时间内姿势舒适性的综合反映,通常是由一系列静态姿势舒适性评价序列综合而成。静态和动态姿势评价的基础是对瞬态姿势的评价。驾驶员驾车时会长时间保持在某些姿势附近,称为主要姿势;它的好坏对姿势舒适性具有重要影响,是瞬态姿势舒适性中的关键。
早期主要通过关节角度范围来评价驾驶姿势舒适性,但这种方法过于粗糙。近年来,越来越多的学者将研究方向转向应用生物力学理论来评价姿势不舒适度的研究。
在姿势舒适性的评价因子中,肢体肌肉负荷是很重要的客观因素。本文中通过人体肌肉负荷来评价瞬态姿势不舒适度,并通过姿势变量预测瞬态不舒适度的方法。鉴于影响驾驶员舒适性感受的主客观因素众多,并且非常复杂,研究的目的在于建立一种客观的姿势舒适性度量尺度,以用于评价和优化汽车人机布置。
1 姿势舒适性研究概述
最早对驾驶姿势的评价采用姿势角度,从Rebiffe对驾驶任务的分析推导,到Porter与Gyi等人的实验测量,乃至Park等人的进一步研究,逐步完善了驾驶姿势舒适角度的理论[1-2]。但在研究和应用中发现,舒适姿势角度方法过于粗糙,难以解释诸如舒适机理、疲劳和运动系统损伤等深层次问题。
RAMSIS是一种3D人体模型和人机工程学分析软件。在RAMSIS开发过程中,在进行姿势统计实验时,还利用Audi车改装的实验台测量了不同身材驾驶员各种姿势时的不舒适度主观感觉,通过对姿势和不舒适度进行统计分析,建立了根据姿势来预测不舒适度的评价模型[3]。实际应用中,这样建立的模型受驾驶员个人因素和外界环境影响较大,评价效果不理想[4]。
近年来,越来越多的学者将研究方向转向应用生物力学理论来评价不舒适度的研究。文献[5]中通过研究发现,姿势舒适性主要与关节角度和关节负荷(关节力和关节转矩)有关。文献[6]中对通过实验获取的驾驶员关节负荷、关节角度和驾驶员的主观不舒适度感觉进行分析,建立了姿势不舒适度预测模型。其不舒适度模型主要考虑关节转矩和关节角度。关节活动越接近其活动极限,关节转矩越大,则不舒适度越明显;对全身不舒适度的评价则采用身体局部不舒适度的最大值来度量。文中还以膝关节为例用曲面图来表达不舒适度模型,如图1所示。模型在RAMSIS中应用时,关节角度很容易根据驾驶员操作任务、汽车布置参数和人体参数计算出来。为能方便地得到人体的关节转矩,文献[7]中研究了根据反向动力学计算关节转矩来评价不舒适度的方法。
因为舒适和疲劳很大程度上是人体的一种综合感受,具有模糊性和不确定性,很难准确测量出来,在上述研究中,是借助主观评价对不同姿势和关节转矩条件下的不舒适度进行判断的[4-7]。但主观评价受个人主观因素和周围环境因素的影响较大,不同评价者的评价结果可能差别很大。要获得具有很强说服力的规律,须进行足够样本数的大量实验。因此,客观、定量地评价姿势舒适性在设计中应用更有意义。
2 基于肌肉负荷的不舒适度建模[8]
本文中主要探讨静态姿势不舒适度。当不考虑时间因素时,静态姿势不舒适度变为瞬态姿势不舒适度。
从文献研究发现,静态姿势不舒适度可主要通过驾驶姿势和肌肉负荷两方面来评价。肌肉负荷包括维持姿势的负荷和用于驾驶操作的负荷。这里的肌肉负荷系指驾驶员完成驾驶操作任务时其肢体肌肉上的肌张力。不同的驾驶姿势反映在驾驶员某些相关肢体上肌肉的收缩力水平不同。因此,可以根据肌肉负荷水平来评判姿势的不舒适度。肌肉负荷很难准确测量和计算,但可从相关关节处的关节负荷的大小反映出来,而关节负荷能够根据反向动力学计算。与文献[5]中方法不同的是,通过前期的研究发现,肌肉或关节负荷与姿势存在很强的相关关系,因此,在构筑姿势不舒适度评价模型时仅采用关节负荷(作为肌肉负荷的量度)。以关节负荷表达的身体局部不舒适度模型为
式中:Di为只考虑关节 i的姿势不舒适度;Li=g(Fi,Mi)为关节负荷,Fi为关节力矢量,Mi为关节转矩矢量。全身不舒适度为各关节不舒适度的加权线性叠加:
式中:wi为第i个关节的权重系数;n为关节数。
因为姿势与肢体负荷存在对应关系,式(2)用姿势变量表示为
式中:A为描述全身姿势的矢量。
在评价静态姿势不舒适度时,肌肉或者关节负荷的获取不方便,但相比之下与肌肉或关节负荷强烈相关的姿势变量却很容易测量和计算,因此,可通过统计分析求得姿势与肌肉负荷的关系,通过姿势变量来预测肌肉负荷,进而预测和评价静态姿势不舒适度。
3 驾驶员姿势不舒适度仿真实验
3.1 驾驶员姿势的描述
为应用姿势预测模型,建立如图2所示的人体运动学模型。还须考虑上肢和下肢外撇和外摆角度。以下肢为例,外撇角为经过胯和踝的铅垂面与经过胯、膝和踝的平面的夹角。外摆角为经过胯和踝的铅垂面与人体矢状面的夹角。给定人体数据和姿势变量值,即可推算所有关节点的坐标。
3.2 基本假设及验证
通过理论分析认为:同一性别、具有不同人体测量学特征(身高、体质量、肢体比例等)的驾驶员,其舒适度(关节负荷)随姿势的变化规律相近。为验证这一假设,采用若干人体测量学特征差别较大的驾驶员进行了仿真实验。驾驶员人体尺寸信息参见表1。考虑驾驶员姿势范围,实验分别针对上肢、下肢和躯干姿势变化的3种情况设计了实验方案。其中下肢姿势变化的方案参见表2。
在CATIA中根据表1建立人体模型,并调节姿势,使这些人体模型下肢姿势分别取表2中的值,输出关节负荷。图3示出右踝关节y方向转矩MRAY随姿势而变化的关系。图中很好地证明上述驾驶员的MRAY随姿势变化规律的一致性。从所有的仿真实验结果可见:对于确定的单一性别群体,不同身材的驾驶员虽然身高、体质量和肢体长度存在差异,但在完成相同的操作任务时,关节点负荷随姿势的变化规律相近;同样,由于肌肉负荷导致的不舒适度在姿势空间内的变化规律也相近。
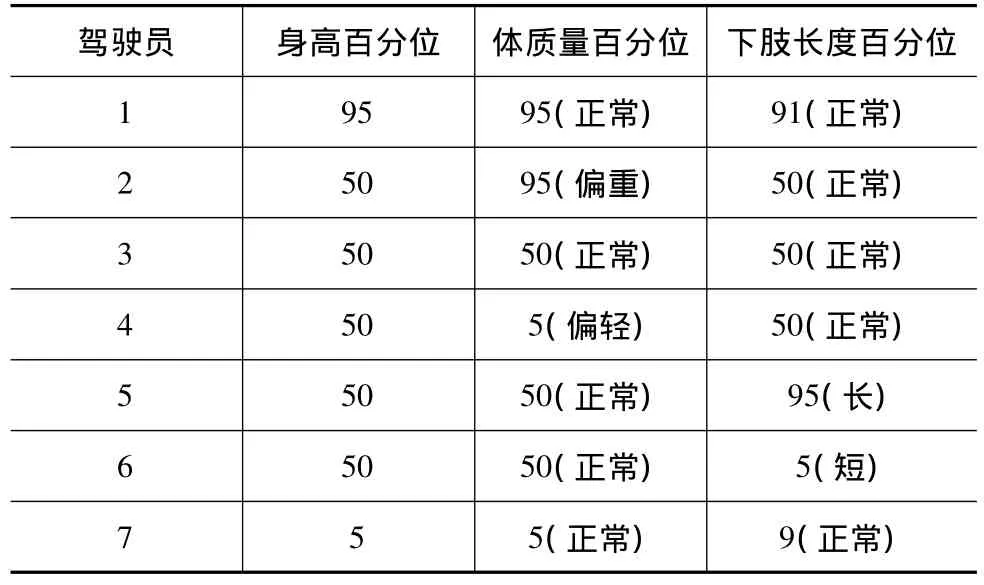
表1 驾驶员信息
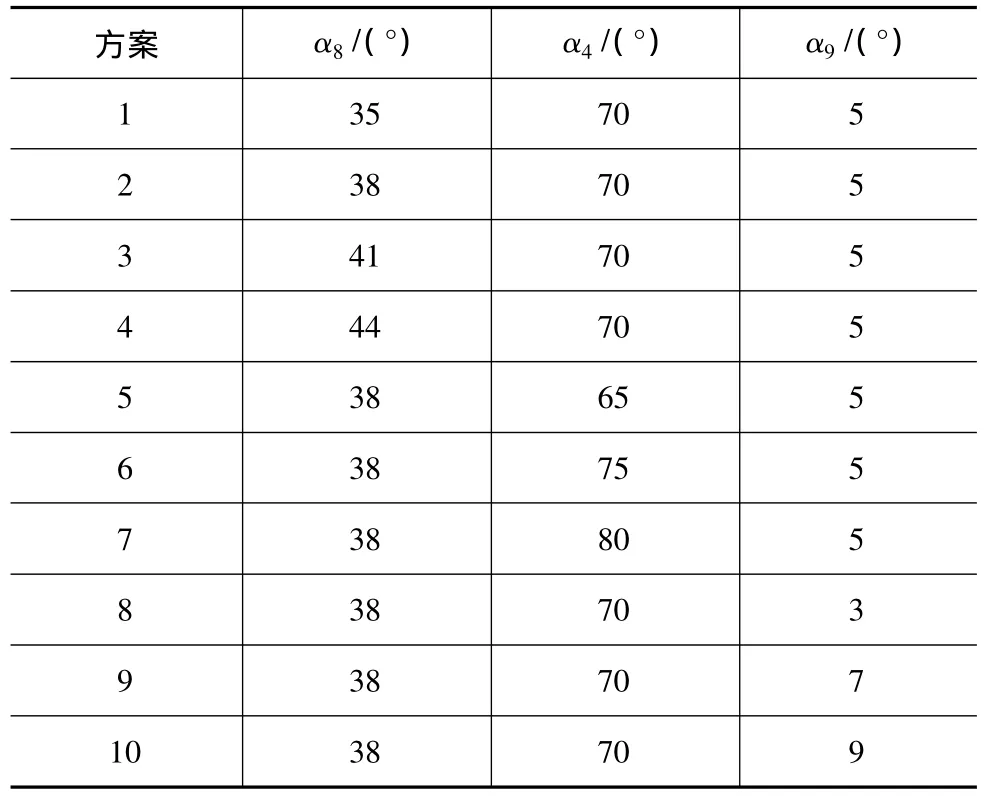
表2 下肢实验方案
3.3 关节负荷规律获取仿真实验
经过对基本假设的验证,本文中采用美国男子95百分位人体模型进行实验,以其结果来代表大多数人的肌肉负荷分布规律。鉴于汽车设计参数变化范围很大,本文中仅对重型商用车进行仿真实验,其部分布置参数范围见表3。
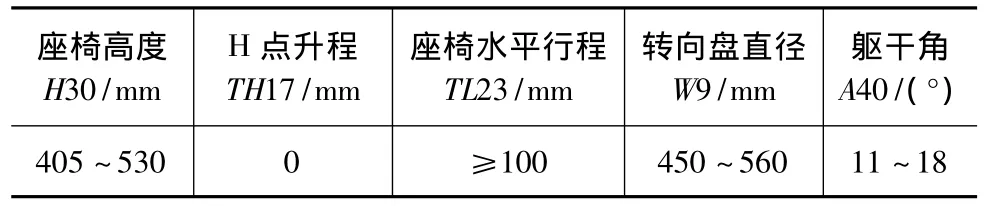
表3 参数变化范围[9]
在CATIA V5软件中建立95百分位男子人体模型,调节其姿势以模拟常见的驾驶操作,如脚踩踏板、手操纵转向盘和变速杆等,输出其关节坐标和关节负荷数据,借助关节坐标数据可计算出姿势。为研究上肢、下肢和躯干单独姿势变化时对不舒适度的影响,分别针对这3种情况设计了实验。下肢实验主要是研究右下肢不同姿势时的不舒适度。左上肢实验研究左手操作转向盘时,不同的转向盘布置方案对不舒适度的影响。右上肢实验研究换挡或操作手制动杆时,这些操纵件的布置方案对不舒适度的影响。躯干实验则研究不同的座椅靠背角度对不舒适度的影响。之所以这样区分是为了清楚地反映车内不同布置方案对主要驾驶姿势乃至其静态不舒适度的影响,以便于对设计方案进行评价和优化。表4列出下肢实验方案。
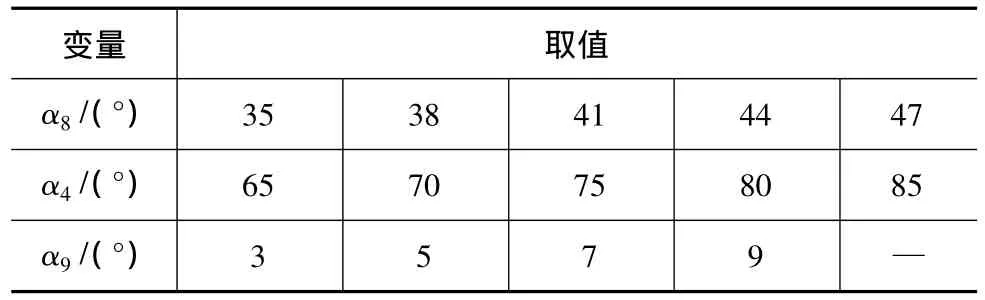
表4 下肢姿势变量取值
通过这些实验,获得了驾驶员关节负荷的分布数据。表5给出了右下肢α8分别为35°、38°和41°时的部分主要关节负荷数据。表5中ML45Y表示第4、5腰椎间转矩,FL45N为第4、5腰椎间正压力,FL45T为第4、5腰椎间剪力(在矢状面内),FRAZ为右踝关节z方向力,FRKZ为右膝关节z方向力,MRKY为右膝关节y方向转矩,FRHZ为右胯关节z方向力,MRHY为右胯关节y方向转矩。
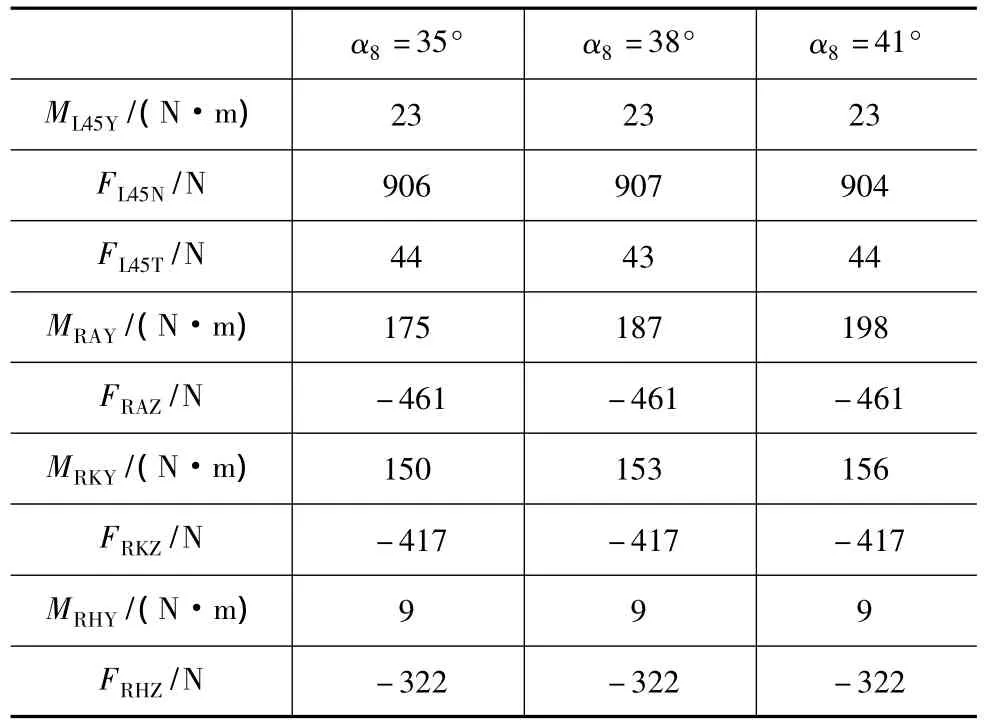
表5 右下肢α8变化时的关节负荷数据
4 商用车驾驶员姿势不舒适度模型
4.1 姿势不舒适度
当上肢、下肢和躯干姿势单独变化时,只会对某些部位的关节负荷产生显著影响,即与这些关节相连的肢体上肌肉负荷的变化相对明显,从而引起不舒适度感的变化也较显著。因此,不舒适度可根据变化显著的关节负荷来计算。通过对数据进行分析,筛选出变化显著、相互独立的关节负荷,将它们归一化(变换到0~1之间)后,加权计算不舒适度,即
式中:Fij为关节负荷;m为数据记录数目;j=1,2,…,m。
以右下肢姿势单独变化时不舒适度计算为例,筛选出的关节负荷因子为第4、5腰椎间转矩(ML45Y)和右踝关节y方向转矩MRAY。为确定筛选出的关节负荷因子的权重,首先假定它们的作用相同,计算等权重时的不舒适度,获得不舒适度数据;然后,计算关节负荷因子与不舒适度的相关系数,以其分别作为相应关节负荷因子的权重。通过计算,ML45Y和MRAY对等权重不舒适度De的相关系数分别为0.842和0.537,归一化处理后得到ML45Y和MRAY的权重分别为0.6和0.4。最后,再根据式(4)计算不舒适度。
4.2 姿势不舒适度预测模型
如前所述,实际应用中姿势不舒适度通常根据姿势变量来计算(预测)。当用下肢关节角度作为设计变量时,回归分析要以 α1、α4和 α8作为自变量,不舒适度D作为因变量来建立模型。下肢姿势不舒适度的预测模型格式为
式中:DL为下肢姿势的不舒适度;B0~B3为模型系数。
表6为在SPSS软件中对数据进行逐步回归得到的模型,3个模型系数的显著性概率值均小于0.001,说明回归效果都很好。这3个模型可根据不同场合来应用。一般情况下α1、α4和α8同时用作设计参数,所以,可选模型3作为一个比较完备的不舒适度预测模型。

表6 下肢不舒适度回归模型
5 应用
重型商用车驾驶室设计和分析中,设计师可根据人体关节角度或驾驶室尺寸参数作为预测因子来评价目标人群姿势舒适性的好坏。本文中针对实车数据,建立一系列目标人群的边缘人体模型,对两种驾驶室布置方案(见表7)进行对比分析。根据表7中设计参数,利用文献[10]中的CPM姿势预测模型定位人体模型,如图4所示,得出下肢、躯干和上肢的姿势角度,代入到姿势不舒适度预测模型中得到相应部位的姿势不舒适度。表8为两种布置方案下95百分位男子姿势不舒适度分析结果的对比。由表8可见,除躯干外,方案2的不舒适度明显小于方案1。
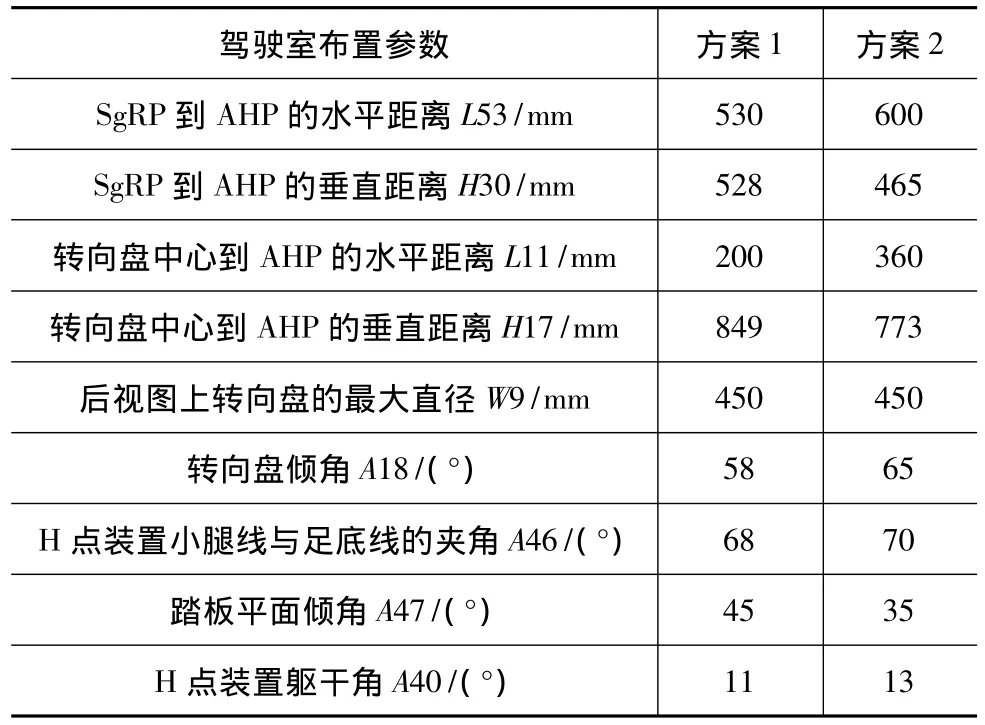
表7 两种驾驶室基本布置方案
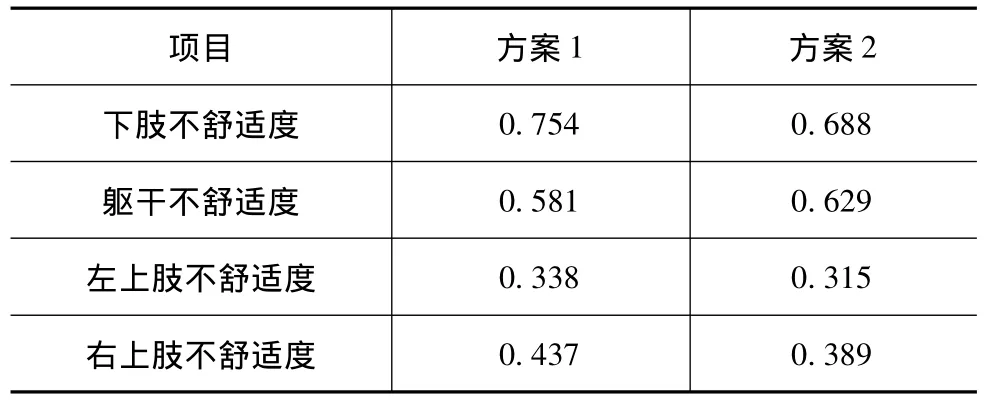
表8 两方案的不舒适度对比
6 结论
鉴于肢体肌肉负荷对于人体的姿势不舒适感受具有重要影响,研究了直接通过人体肌肉负荷来评价瞬态姿势不舒适度,并通过姿势变量来预测瞬态不舒适度。虽然肢体肌肉负荷水平与人体姿势不舒适度感受的关系尚未完全知晓,并且二者随姿势变化的规律也可能不完全一致,但从减小由于姿势原因导致的人体肌肉负荷的角度考虑,该模型用于驾驶室布置分析与优化时具有一定的实用价值。目前,本文中的驾驶员姿势不舒适度模型只考虑了维持姿势的肌肉负荷,尚未考虑驾驶员进行各项驾驶操作时人体出力对不舒适度的影响。
[1]Porter J M,Gyi D E.Exploring the Optimum Posture for Driver Comfort[J].International Journal of Vehicle Design,1998,19(3):255-266.
[2]Park Se Jin,Kim Chae-Bogk,Kim Chul Jung,et al.Comfortable Driving Postures for Koreans[J].International Journal of Industrial Ergonomics,2000,10(26):489-497.
[3]Andreas Seidl.RAMSIS-A New CAD Tool for Ergonomic Analysis of Vehicles Developed for the German Automotive Industry[C].SAE Paper 970088.
[4]Gunnar Nilsson.Validity of Comfort Assessment in RAMSIS[C].SAE Paper 1999-01-1900.
[5]Heiner Bubb,Stefan Estermann.Influence of Forces on Comfort Feeling in Vehicles[C].SAE Paper 2000-01-2171.
[6]Iris Zacher,Heiner Bubb.Strength Based Discomfort Model of Posture and Movement[C].SAE Paper 2004-01-2139.
[7]Florian Fritzsche,Heiner Bubb.Discomfort Model for Arm Movements[C].SAE Paper 2008-01-1872.
[8]陈景辉.重型商用车驾驶员坐姿舒适性仿真研究[D].长春:吉林大学,2009.
[9]Society of Automotive Engineers.Recommended Practice J1100 Motor Vehicle Dimensions[S].Society of Automotive Engineers,Inc.,Warrendale PA,2002.
[10]Reed M P,Manary M A,Flannagan C A C,et al.A Statistical Method for Predicting Automobile Driving Posture[J].Human Factors,2002,44(4):557-568.
猜你喜欢
纺织科学研究(2021年9期)2021-10-14 08:52:12
铁道通信信号(2020年1期)2020-09-21 08:55:16
文苑(2020年5期)2020-06-16 03:18:10
小学生学习指导(低年级)(2020年3期)2020-06-02 08:50:38
中国生殖健康(2019年10期)2019-01-07 01:20:58
建筑热能通风空调(2018年5期)2018-07-09 03:16:38
浙江工业大学学报(2017年5期)2018-01-22 02:03:36
池州学院学报(2017年3期)2017-10-16 01:38:35
消费者报道(2016年3期)2016-02-28 19:07:32
汽车零部件(2014年6期)2014-09-20 06:24:48