
舰船海况模拟平台等效摇摆参数研究
2013-08-26 02:46周云华彭松江邱群先游仁华谢丽云
舰船科学技术 2013年9期
周云华,彭松江,邱群先,游仁华,谢丽云
(中国船舶重工集团公司第七一三研究所,河南 郑州 450015)
0 引言
舰船海况模拟平台是模拟实现舰载设备承受舰船摇摆环境后的结构动力学响应研究、机构动作规划、轻量化设计研究的理想设备,它能够接近真实地再现舰船在不同海况下的摇摆情况,能够使舰载设备研制在陆基环境下接受舰载环境考核,避免上舰后才暴露出与载体环境不匹配问题的发生,对提升舰载设备的研制质量具有重要意义,因此得到舰载设备主管及研制部门的高度重视,并得到快速、广泛的发展。如文献[1]提到了六自由度舰船模拟平台,为舰载直升机系统提供海上航行时舰船摇摆的试验条件;文献[2]对单轴船舶摇摆试验台进行动画生成研究,为减摇水舱的设计和试验提供方法;文献[3]对单轴船舶摇摆试验台的台架设计进行深入探讨;文献[4]对用于船载仪器设备动态精度标定及性能试验的三回转自由度船用摇摆试验台进行了建模和控制系统的设计。
从上述文献以及互联网上可以查到相关舰船海况模拟平台 (或摇摆台)所模拟的大多是舰船的横摇和纵摇,而且横摇幅值大约在±20°、周期在8~12 s,纵摇幅值大约在±10°、周期在6~8 s,与实际舰船的横摇幅值与周期基本接近。单从摇摆参数讲,可以再现舰载设备在舰船摇摆环境下的工作环境。
但深入分析可发现,这类舰船海况模拟平台只能达到一定的试验目的,原因在于舰船的摇心到甲板面的距离通常在5 m、甚至8 m以上,而常用的舰船海况模拟平台的摇摆半径往往只有1~2 m。被试设备在模拟平台上的安装位置通常都假定横摇、纵摇中心的铅垂轴上,而实际情况是只有较少的舰载设备能够安装到舰船的这一有限区域,大多数设备距摇心水平、前后方向都有一定的距离。以上2种情况造成被试设备在模拟平台上的摇摆效果与舰船实际摇摆情况具有一定差距,尤其在舰首与舰尾布置的舰载设备。因此,要想利用较小的舰船海况模拟平台较为真实地模拟被试设备在大型舰船上的实际摇摆效果,必须要合理地对模拟平台的摇摆参数进行等效规划,才能达到接近真实模拟的目的。
1 舰载设备承受舰船摇摆时过载系数
一般认为,舰船在规则波中的横摇、纵摇都是简谐运动[5],舰船海况模拟平台一般也是按照简谐运动进行波形的控制。考虑舰船横摇及纵摇时舰载设备承受舰船摇摆时的过载系数见下式:
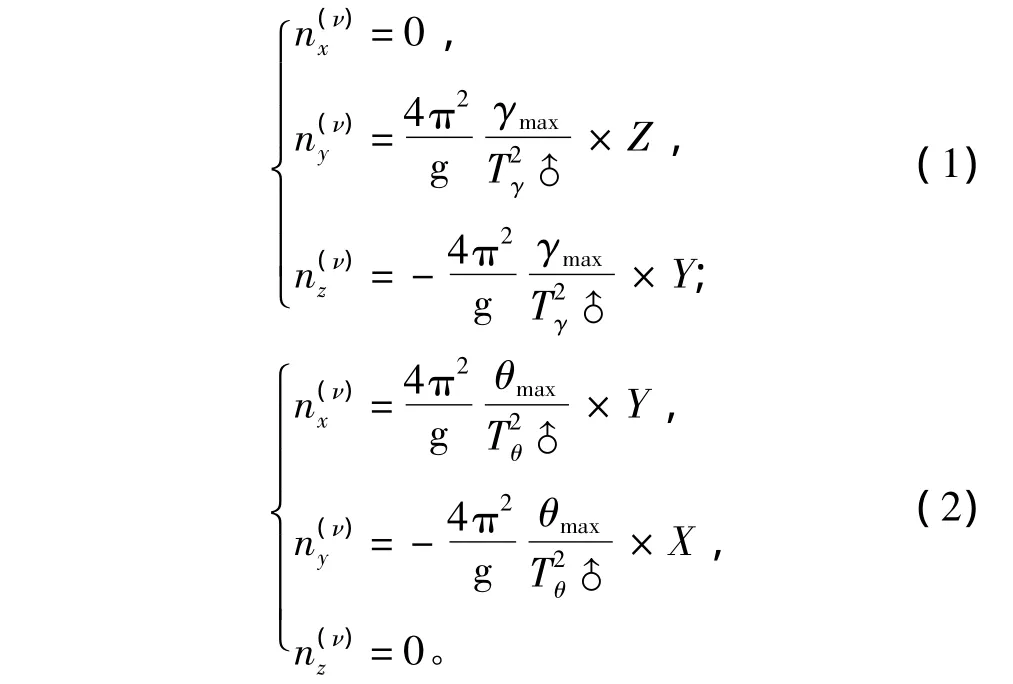
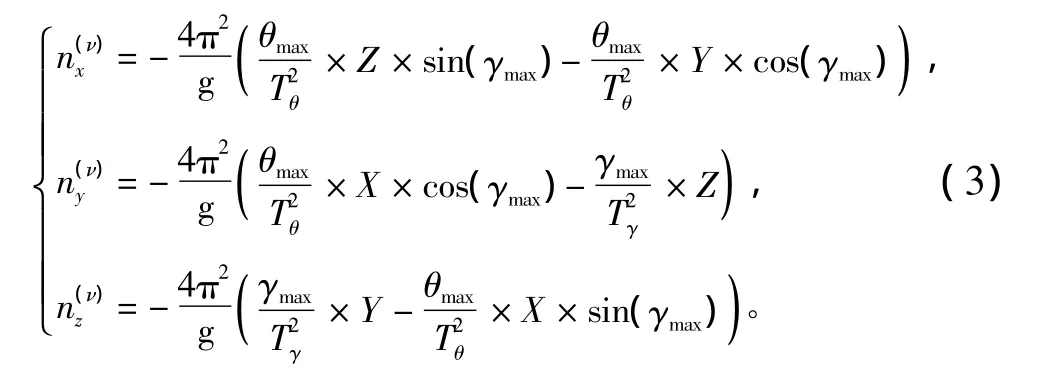
假定舰船横摇、纵摇同时达到最大值时舰载设备承受舰船摇摆时的过载系数见下式[6]:
2 舰船海况模拟平台的等效摇摆参数
假设舰船的横摇、纵摇中心重合,建立如图1所示的舰船摇心固定坐标系OH-XHYHZH,被试舰载设备安装在甲板面上,以其重心位置建立固连坐标系O-XYZ,相对舰载设备自身固定,在OH-XHYHZH中的坐标为(X,Y,Z)。以常见的横摇、纵摇模拟为例,假设舰船实际的摇摆参数如表1所示。

图1 舰船坐标系与舰载设备Fig.1 Reference frame of ship and shipborne equipment
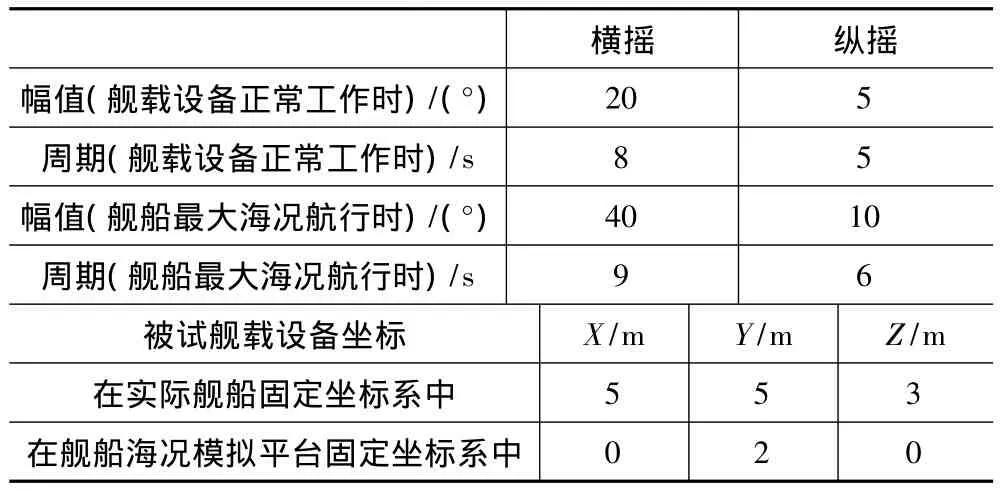
表1 假定的舰船摇摆参数及舰载设备坐标值Tab.1 Assumed ship swing parameters and coordinate of shipborne equipment
被试舰载设备在舰船海况模拟平台上的坐标系如图2所示,同样假定模拟平台的横摇、纵摇中心重合,坐标系的意义同图1一致,被试舰载设备在模拟平台固定坐标系内的坐标为 (x,y,z),见表1。按照式(1)~式(3)过载系数的定义,理想状态下,被试舰载设备在舰船上因摇摆带来的质心过载系数应等于在舰船海况模拟平台上因摇摆带来的质心过载系数,由此推算可以得到舰船海况模拟平台的等效摇摆参数,如表2所示。
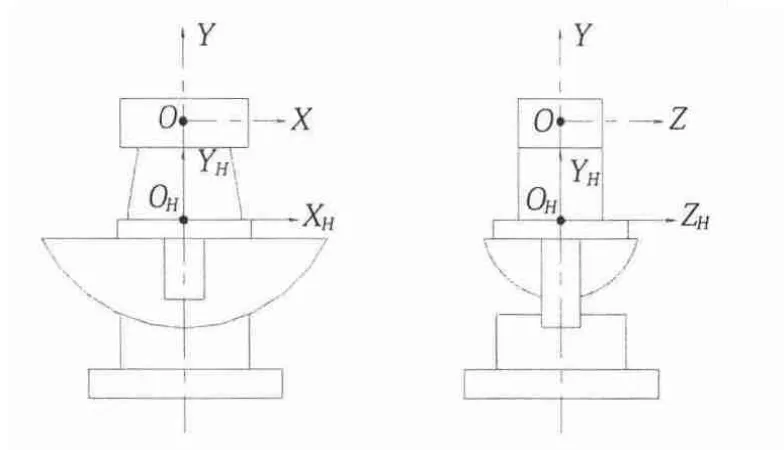
图2 舰船海况模拟平台坐标系与被试舰载设备Fig.2 Reference frame of ship motion simulation platform and shipborne equipment to be tested

表2 舰载设备在舰艇上的过载系数与等效摇摆参数Tab.2 Overload coefficient of shipborne equipment on the ship and equivalent swing parameters
从表2可以看到,被试设备质心通常在舰船海况平台上按X分量、Z分量均为0布置时,不能模拟Y方向上产生的惯性负载。考虑到Y方向与重力加速度方向相同,通常按受压载荷处理,被试设备承受的抗压强度应具有一定的安全系数。
从表2还可以看到,要使被试舰载设备在实际舰船与舰船海况模拟平台上具有摇摆响应的物理相似性,舰船海况模拟平台的摇摆角度或摇摆周期指标都要求更高,而如果保持与舰船实际摇摆参数相同,则所模拟出的过载系数都偏小,模拟的真正意义将大打折扣。
3 结语
通过上述分析,对于舰船海况模拟平台可以得到以下基本结论,这些结论对合理提出模拟平台的具体指标具有极其重要的现实意义:
1)只考虑横摇或纵摇时,在保持横摇或纵摇最大幅值指标不变的情况下,对舰船海况模拟平台提出的等效横摇或纵摇周期指标都应提高,本例中等效横摇周期指标需由实际舰船的8 s提高到5.05 s,等效纵摇周期需由5 s提高到3.16 s;在保持横摇或纵摇摇摆周期指标不变的情况下,等效横摇或纵摇最大幅值指标也都应提高,本例中等效横摇最大幅值指标需由实际舰船的20°提高到50°,等效纵摇周期需由5°提高到12.5°;而为了兼顾横摇或纵摇指标的易实现性,本例中等效横摇最大幅值为38.5°等效横摇周期为7 s,等效纵摇最大幅值为8°等效横摇周期为4 s。
2)在考虑横摇、纵摇耦合效应时,在保持横摇、纵摇最大幅值指标不变的情况下,对舰船海况模拟平台提出的等效横摇、纵摇周期指标都应提高,本例中等效横摇周期指标需由实际舰船的8 s提高到5.72 s,等效纵摇周期需由5 s提高到3.57 s;在保持横摇、纵摇摇摆周期指标不变的情况下,等效横摇、纵摇最大幅值指标也都应提高,本例中等效横摇最大幅值指标需由实际舰船的20°提高到39°,等效纵摇周期需由5°提高到11.8°;而为了兼顾等效横摇、纵摇指标的易实现性,本例中等效横摇最大幅值为29.9°、等效横摇周期为7 s,等效纵摇最大幅值为6.8°、等效横摇周期为4 s。
[1]陈晓江.六自由度舰船模拟摇摆平台运动系统的分析与研究[D].南京:南京理工大学,2006.
[2]谭光宇,李国斌,黄世涛,等.船舶摇摆试验台仿真系统的动画生成[J].船舶工程,2003,25(3):38 -40.TAN Guang-yu,LIGuo-bin,HUANG Shi-tao,etal.Implementation of 3D animation in ship rolling test bench simulation system[J].Ship Engineering,2003,25(3):38 -40.
[3]梁利华,彭勇,张松涛.单轴船舶运动模拟摇摆试验台架设计[J].自动化技术与应用,2006,25(3):18-20.LIANG Li-hua,PENG Yong,ZHANG Song-tao.Single axis swing bench simulating the ship motion[J].Techniques of Automation and Applications,2006,25(3):18 -20.
[4]李学忠,黄守训,林其生,等.船用摇摆试验台建模和控制系统设计[J].电气传动,2006,36(11):11 -15.LI Xue-zhong,HUANG Shou-xun,LIN Qi-sheng,et al.Model and control system for the simulation sway test system[J].Electric Transmission,2006,36(11):11 -15.
[5]李志华,王树宗.船舶摇摆下鱼雷空中弹道研究[J].鱼雷技术,2005,13(2):40 -43.LIZhi-hua,WANG Shu-zong.Effecton torpedoair trajectory with the surface ship swaying considered[J].Torpedo Technology,2005,13(2):40 -43.
[6]姚昌仁,张波.火箭导弹发射装置设计[M].北京:北京理工大学出版社,1998.75 -78.
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
汽车实用技术(2022年11期)2022-06-20
军事护理(2022年4期)2022-05-08
心电与循环(2021年4期)2021-11-29
防爆电机(2021年3期)2021-07-21
锻压装备与制造技术(2020年6期)2021-01-25
宝藏(2020年3期)2020-10-14
电子制作(2017年9期)2017-04-17
船海工程(2015年4期)2016-01-05
舰船科学技术(2015年8期)2015-02-27
