基于非线性PID的串联锂离子电池组的均衡控制
2013-07-20 02:51凌睿董燕严贺彪武美蓉
计算机工程与应用 2013年13期
凌睿,董燕,严贺彪,武美蓉
重庆大学 自动化学院,重庆 400030
基于非线性PID的串联锂离子电池组的均衡控制
凌睿,董燕,严贺彪,武美蓉
重庆大学 自动化学院,重庆 400030
锂离子电池由于具有比能量大,循环寿命长,自放电率低和无记忆效应等优点,成为了当前最具发展前景的动力电池。一个锂电池电压较低,仅为3.0~4.2 V,因此在高电压供电系统中通常需要串联多块电池来提供相应大小的电压。但是由于电池的内阻不同,电池内部的电量的不平衡,电池的老化和电池组在充电和放电过程中的环境温度变化等原因造成了电池能量的不平衡。在充放电过程中,极易出现过充或过放现象,导致总电量的存储和电池的循环寿命减少,并对电池造成永久的损害。因此,必须对电池电压进行能量均衡控制以保证电池正常工作,避免过充或过放现象。
目前国内外学者已经提出了许多研究方法。其中对电池均衡电路研究较多,文献[1-7]提出了几种均衡电路,但仍存在均衡效率低,电路实现复杂的缺点。文献[1,7-8]应用了模糊控制算法对均衡过程进行控制,但在稳态时,电池电压存在振荡现象,且均衡精度较低。这样,造成了过多的开关动作损耗,降低了均衡效率。
为了克服这些不足,针对文献[7]的均衡电路,设计了一种非线性PID控制算法。本文算法利用非线性函数,构造了误差与PID参数的非线性映射关系,使得PID调节器中的增益参数随控制误差而变化,从而提高均衡控制精度和均衡效率。目前,尚未见到采用非线性PID控制对电池组进行均衡控制的相关研究。本文利用提出的非线性PID控制算法设计了电池组能量均衡控制器,根据电池组内各单体电池电压差,实时地调整均衡控制器的控制参数,缩短了均衡时间,提高了均衡精度和均衡效率。
1 均衡电路
图1给出了一个锂电池能量均衡均衡系统图,每两个电池接一个均衡器(Cell Equalizers,CE)以达到串联的所有电池的能量均衡。文献[7]提出了一种均衡电路,如图2所示。
单个电池均衡器由两个耦合电感L1和L2,能量传输电容C1,两个二极管D1和D2,以及两个MOSFETQ1和Q2组成。其中,两个MOSFET作为电池均衡控制开关。两个电池之间通过中间的能量转移电容进行能量转移,通过控制MOSFET的开通与关断和开通关断的时间来控制。
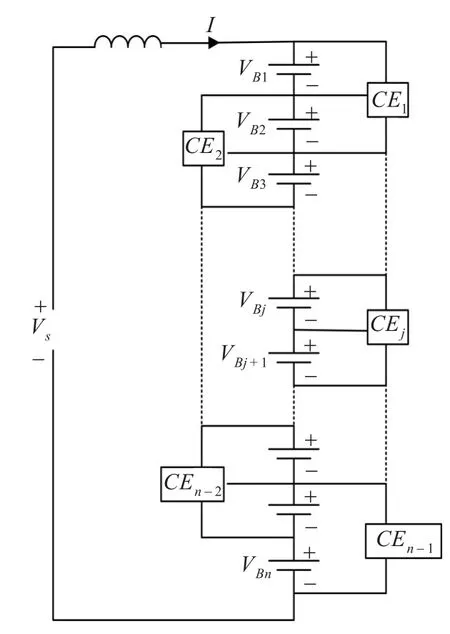
图1 设计有均衡器的串联锂电池
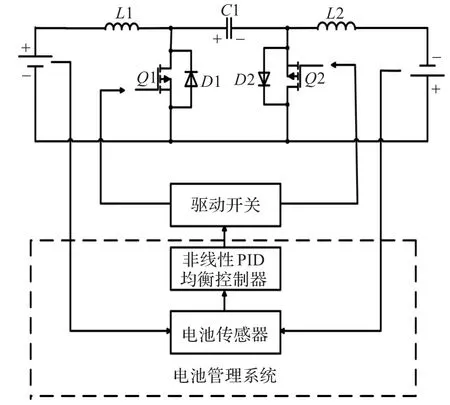
图2 单个均衡器的结构图
D为占空比,TS为周期,在通常情况下,电容VC1的初始电压为VB1+VB2,假如VB1>VB2,在DTS期间打开Q1。如图3(a)所示,电容C1的能量通过电流流过L2和VB2,转移到VB2中,且L2也存储了能量,VB1的能量在这期间就转移到电感L1储存。因此L1、L2在DTS期间一直在存储能量,电流也在增大,如图3(e)所示。在(1-D)TS期间,关断Q1,D2被迫打开,如图3(b)所示,VB1和L1中的能量通过电流转移给电容,储存在L2中的能量在这个期间就给VB2充电。因此在(1-D)TS期间,L1、L2的电流一直减小,如图3(e)所示。以上分析是在VB1>VB2情况下的能量转移,在VB1<VB2情况下有类似的结果,如图3(c)、(d)所示。在VB1<VB2情况下的能量转移主要是Q2控制的,能量从VB2转移到VB1中。
当VB1>VB2时,在DTS期间(t0≤t<t1),Q1处于打开状态:
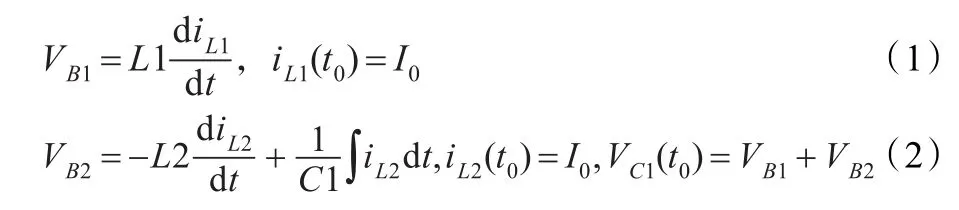
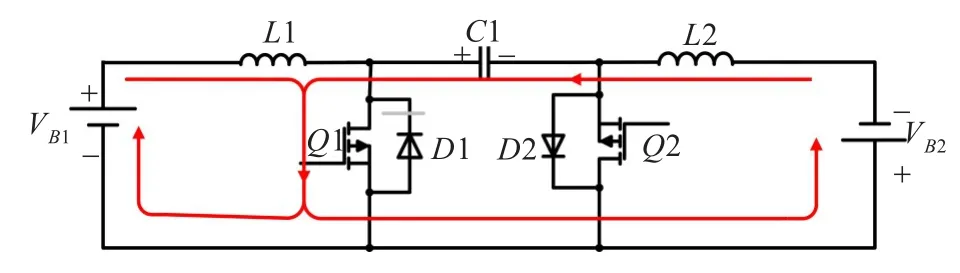
图3 (a)在VB1>VB2情况下DTS段的均衡电流流向
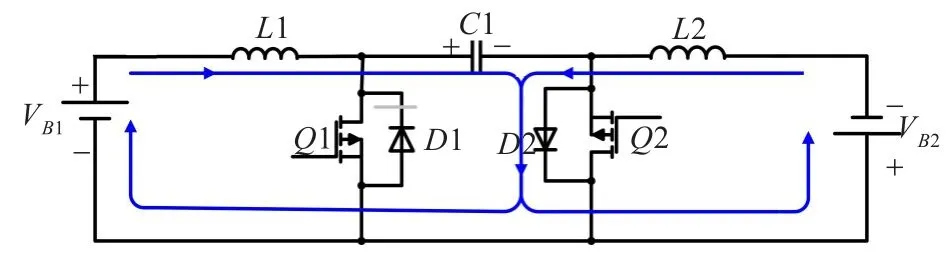
图3 (b)在VB1>VB2情况下(1-D)TS段的均衡电流流向
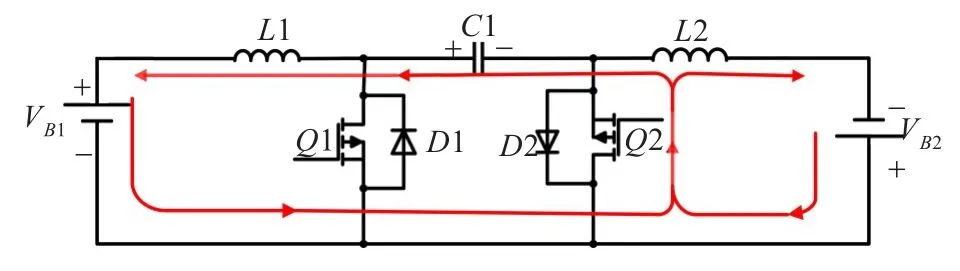
图3 (c)在VB1<VB2情况下DTS段的均衡电流流向
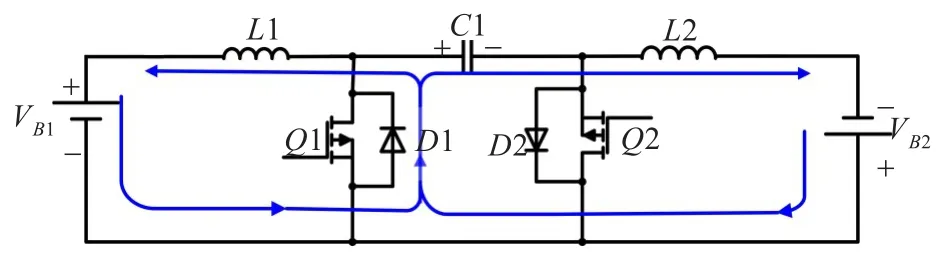
图3 (d)在VB1<VB2情况下(1-D)TS段的均衡电流流向
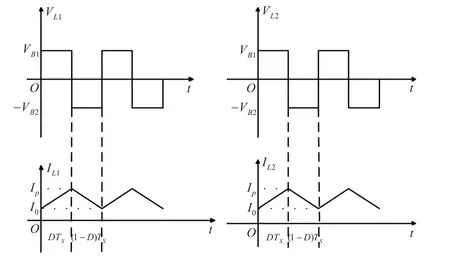
图3 (e)在VB1>VB2情况下的波形图
当Q1关断,D2被迫打开时,即(1-D)TS期间(t1≤t<t2):

根据在稳定状态下,电容C1在整个开关周期的平均电流得到下式:

D为占空比,TS为整个开关周期,根据上面的式子很容易得出[7]:
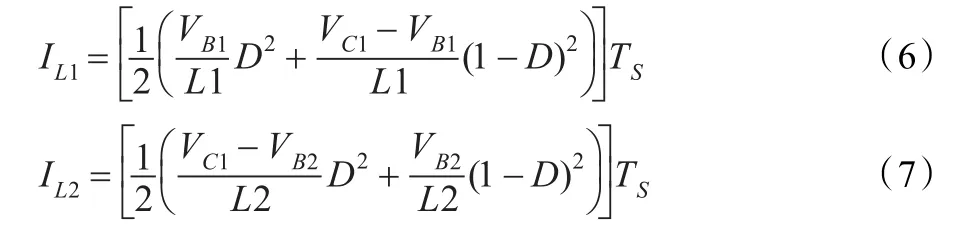
由上面的式子可以看出开关周期TS和电流关系密切,在均衡过程中对开关周期进行控制,即可达到均衡的效果。为了避免对电池造成大的损坏,需要保证均衡电流在安全的范围以内。
2 非线性PID控制算法的设计
2.1 非线性PID控制
常规PID控制是一种线性的控制算法,已经被广泛应用于实际的控制系统中。但对于非线性被控对象,常规的PID控制算法难以达到理想的控制效果。文献[9]提出了一种非线性PID控制算法。非线性PID调节器的控制输入与常规PID输入类似,可表示为如下函数:

为方便叙述非线性PID的性质,引入图4。
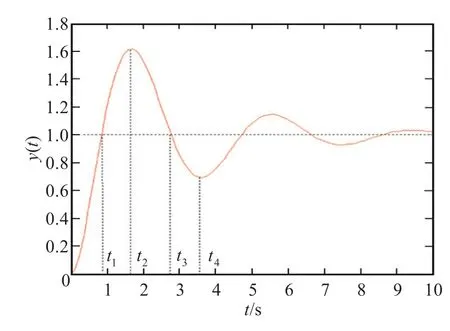
图4 一阶系统阶跃响应曲线图
在响应时间0≤t≤t1段,为保证系统有较快的响应速度,比例增益参数Kp在初始时较大,同时为了减小超调量,希望误差ep逐渐减小,比例增益Kp也应随之减小,而微分增益参数Kd应由小逐渐增大,这样可以保证在不影响响应速度的前提下,抑制超调的产生;在t1≤t≤t2段,为了增大反方向控制作用,减小超调,因此期望Kp和Kd都逐渐增大;在t2≤t≤t3段,为了使系统尽快回到稳定点,并不再产生大的惯性,期望Kp逐渐减小;在t3≤t≤t4段,期望Kp逐渐增大,作用与t1≤t≤t2段相同;为了抑制超调的产生,在t2≤t≤t4中Kd应该继续增大。
当误差信号较大时,减小积分增益,以防止响应产生振荡,有利于减小超调量;而当误差较小时,增大积分增益,以消除系统的稳态误差。根据上面的介绍,比例增益参数KP、微分增益参数Kd、积分增益参数Ki的变化形状,如图5所示。
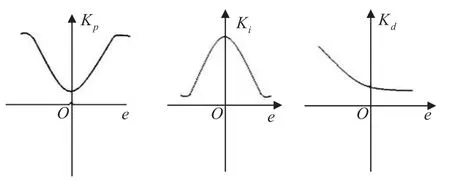
图5 Kp、Ki、Kd变化的示意图
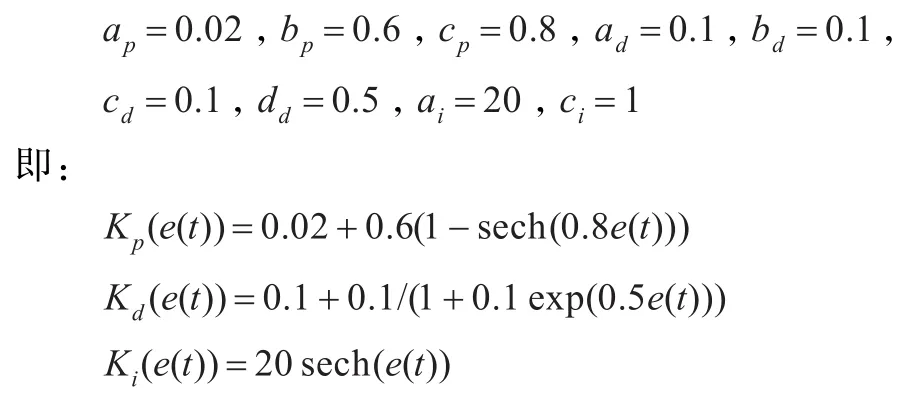
根据图5可分别构造如下非线性函数:

其中ap、bp、cp为正实常数,调整cp的大小可以调整Kp变化的速率。

其中ad、bd、cd、dd为正实常数,调整dd的大小可以调整Kd的变化速率。

其中ai、ci为正实常数,ci的取值决定了Ki的变化快慢程度。
如果非线性函数中的各项参数选择适当的话,能够使控制系统既达到响应快,又无超调现象。另外,由于非线性PID调节器中的增益参数能够随控制误差而变化,因而其抗干扰能力也较常规线性PID控制强。
2.2 均衡电路控制器设计
本文中,以电池电压来表示电池能量的大小,因此,将均衡电池电压差作为e。电池组均衡过程中,能量以电流的形式进行转移,而电流大小与开关周期有关,控制器通过控制均衡系统中的开关周期,来调节均衡电流,则能够对电池组均衡速度进行控制。但为了防止电流过大对电池造成损害,需要对均衡电流的大小进行限制。
3 仿真结果
以两节串联电池为例建立电池均衡管理的模型。其中的各个参数设置如下,VB1=4.0 V,VB2=3.5 V,L1=L2=100 μH,C=470 μF,占空比D=0.5。以两个电池的电压差为e(t),通过非线性PID算法得到的输出控制Q1和Q2的开通与关断顺序及相应的导通时间长短。在进行参数选择时,Kp映射函数中ap与bp增大会使系统超调加大,而且可能会导致均衡电流超出阀值,对电池造成损害。适当增大Ki中的ai,可以减缓Kp变化对系统带来的影响,减小超调。减小Kd中的ad、bd与cd,可以起到减小系统振荡的作用。cp、dd、ci是各个增益的变化速率,如果过大,则会使系统产生振荡,影响系统稳定。本文取控制器参数为:
3.1 与传统PID对比分析
采用图2所示均衡电路,对两块电池进行能量均衡控制,可以得到如图6所示仿真结果。
从仿真结果图看,最终两个电池的电压达到了平衡,反应迅速,几乎无超调。而对于传统的PID算法经过参数整定后,取P=0.01,I=1,D=0.3,得到如图7的仿真结果。
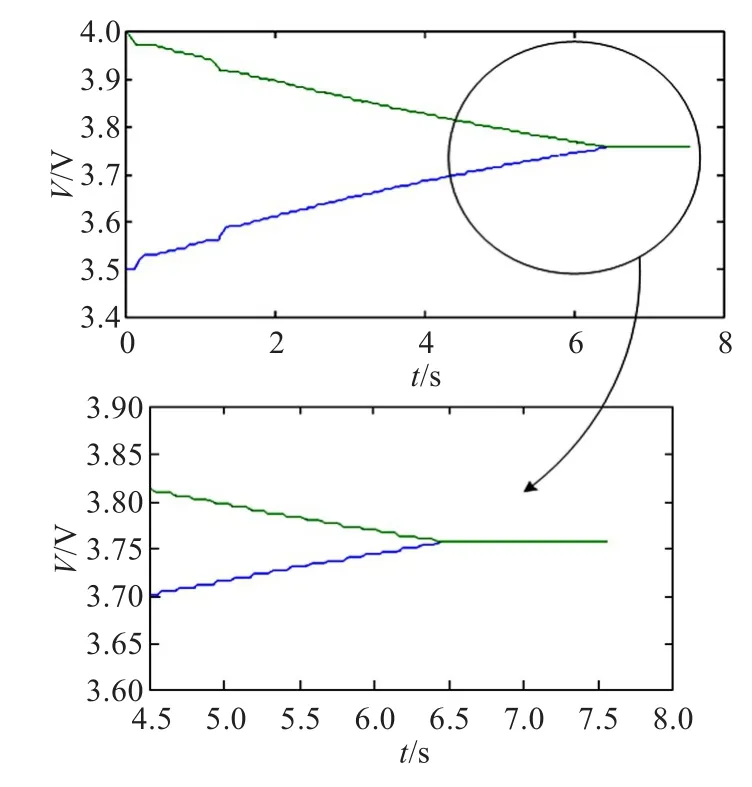
图6 非线性PID控制电池均衡器仿真结果
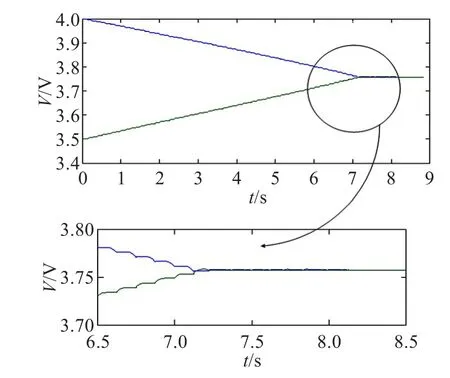
图7 常规PID控制的电池均衡器仿真结果图
从图6和图7可知,常规PID比非线性PID均衡时间长,且在稳定前有小的振荡。由于非线性PID调节器中的增益参数能够随控制误差而变化,所以其动态性能比较好,反应时间短,且抗干扰能力也较常规线性PID控制强。
3.2 与模糊控制对比分析
针对文献[7]的模糊控制,本文也进行了相应的对比仿真,取电压差Vd和两个电池的平均电压VB作为输入,均衡电流I为输出,均分为5个等级:VS(非常小)、S(小)、M(中)、L(大)、VL(非常大),获得如图8所示规则表。通过仿真得到如图9的仿真结果。

图8 模糊控制的规则库
从模糊控制的仿真结果看出,均衡时间比非线性PID稍长,电压一直会振荡,且始终存在较大静态误差,这会造成过多的开关动作,增大能量损失。

图9 模糊控制的电池均衡仿真结果图
图10是采用非线性PID均衡控制算法电流的变化过程。从图中可以看出,电流在均衡过程中开始比较大,随着均衡的进行,电流慢慢变小,最后趋于0。
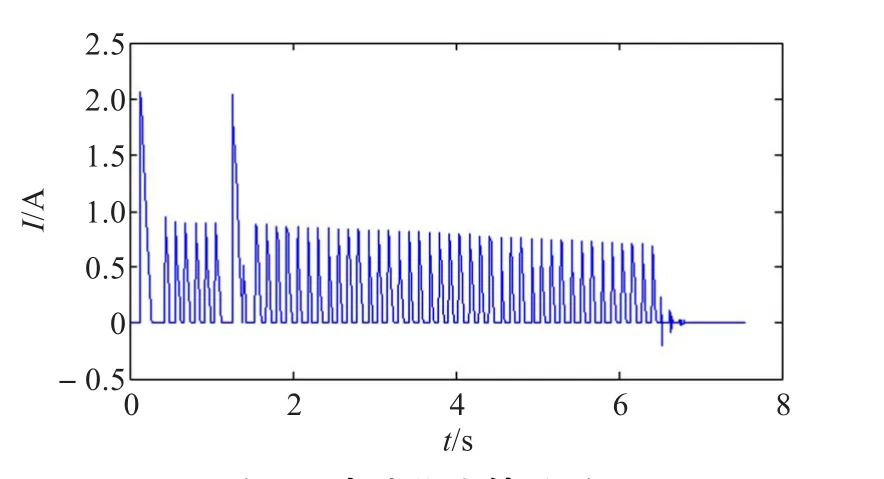
图10 电流仿真结果图
本文提出的非线性PID控制算法,在锂电池充放电均衡过程中改善了以往控制算法控制精度差和静态振荡问题,减少了能量损失,从而改善了均衡的效果,实现了更高效的均衡控制。
4 总结
本文提出了非线性PID控制算法实现电池能量均衡。通过对串联电池组的能量均衡,避免了由于锂电池组中单体电池的不一致,而导致的过充过放现象,延长了电池组的使用寿命,降低了能量存储成本。仿真结果表明,本文方法具有较好的充放电能量均衡效果,能量均衡控制器效率高,且无静态误差,为大容量的串联电池组提供了充放电能量均衡控制管理的解决方案,具有很高的实用价值。
[1]Cheng M W,Wang S M,Lee Y S.Fuzzy controlled fast charging system for Lithium-ion battery[C]//Proceedings of the International Conference on Power Electronics and Drive Systems,Taipei,Taiwan,China,2009:1498-1503.
[2]Lee Y S,Cheng G T.Quasi-resonant zero-current-switching bidirectional converter for battery equalization applications[J]. IEEE Transactions on Power Electronics,2009,21(5):1213-1224.
[3]Baughman A C,Ferdowsi M.Double-tiered switched-capacitor battery charge equalization technique[J].IEEE Transactions on Industrial Electronics,2008,55(6):2277-2285.
[4]Kutkut N H.A modular nondissipative current diverter for EV battery charge equalization[C]//Proceedings of Applied Power Electronics Conference and Exposition(APEC’98),Anaheim,USA,1998:686-690.
[5]Park H S,Kim C H,Moon G W.A modularized charge equalizer for an HEV Lithium-ion battery string[J].IEEE Transactions on Industrial Electronics,2009,56(5):1464-1476.
[6]Xu A G,Xie S,Liu X.Dynamic voltage equalization for serriesconnectedultracapacitorsinEV/HEVapplications[J].IEEE Transactions on Vehicular Technology,2009,58(8):3981-3987.
[7]Lee Y S,Cheng M W.Intelligent control battery equalization for series connected Lithium-ion battery strings[J].IEEE Transactions on Industrial Electronics,2005,52(5):1299-1300.
[8]Yan J Y,Cheng Z,Xu G Q.Fuzzy control for battery equalization based on state of charge[C]//Proceedings of Vehicular Technology Conference Fall(VTC 2010-Fall),Ottawa,Canada,2010:1-7.
[9]肖永利,张琛.位置伺服系统的一类非线性PID调节器设计[J].电气自动化,2000(1):20-22.
[10]刘金琨.先进PID控制MATLAB仿真[M].3版.北京:电子工业出版社,2011.
LING Rui,DONG Yan,YAN Hebiao,WU Meirong
School of Automation,Chongqing University,Chongqing 400030,China
A new equalization algorithm of nonlinear PID control is proposed for the multi-cells equalization problem in the charging and discharging process of Lithium-ion battery pack.The nonlinear mapping between PID parameters and error,which is constructed by nonlinear functions,regulates the gains of PID controller according to error and has better robustness and dynamic response than traditional PID controller.Simulation results show that the proposed algorithm has high precision,rapid response and without overshoot in the energy equalization control of Lithium-ion battery pack.
battery pack control;nonlinear PID;energy equalization;Lithium-ion battery
针对串联锂离子电池组充放电过程中的均衡问题,设计了一种新型的非线性PID均衡控算法。利用非线性函数,构造了误差与PID参数的非线性映射关系,使得PID调节器中的增益参数随控制误差而变化,比常规的线性PID调节器具有更强的鲁棒性和更好的动态响应。仿真结果表明,该算法控制精度高,速度快,能够无超调地实现锂离子电池的能量均衡。
串联锂电池组控制;非线性PID;能量均衡;锂离子电池
A
TP271
10.3778/j.issn.1002-8331.1111-0119
LING Rui,DONG Yan,YAN Hebiao,et al.Nonlinear PID based equalization control for Li-ion battery pack equalization control.Computer Engineering and Applications,2013,49(13):237-240.
国家自然科学基金(No.61203097);中国博士后科学基金面上资助(No.2012M511907);中央高校基本科研业务费资助(No.CDJZR10170005)。
凌睿(1979—),男,博士,讲师,硕士导师,主要研究方向为新能源系统及控制;董燕(1988—),研究生,主要研究方向为电池组能量管理控制。E-mail:lingrui@cqu.edu.cn
2011-11-10
2012-03-19
1002-8331(2013)13-0237-04
CNKI出版日期:2012-04-25http://www.cnki.net/kcms/detail/11.2127.TP.20120425.1722.072.html
猜你喜欢
新世纪智能(英语备考)(2018年11期)2018-12-29
制造技术与机床(2017年6期)2018-01-19
消费导刊(2017年19期)2017-12-13
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
探测与控制学报(2015年4期)2015-12-15
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年5期)2014-02-28