基于数字图像的水泥混凝土路面嵌缝料损坏识别
2013-07-15 15:00:48马正军英红付琴谈至明陈智杰
建筑材料学报 2013年2期
马正军,英红,付琴,谈至明,陈智杰
(1.同济大学道路与交通工程教育部重点实验室,上海 201804;2.桂林电子科技大学建筑与交通工程学院,广西桂林 541004;3.广西交通投资集团有限公司,广西南宁 530028)
嵌缝料损坏诱发众多水泥混凝土路面病害,如错台、脱空等.在进行水泥混凝土路面状况评定时,嵌缝料损坏程度是必须考察的一个重要指标[1].嵌缝料损坏程度与路面接缝(横向)完好性密切相关[2-6].目前,嵌缝料损坏评价主要依靠人工,费时费力且不安全.随着道路图像检测车在路面病害检测中的应用,采用数字图像处理技术对水泥混凝土路面嵌缝料损坏进行评价,准确度高,速度快,具有重要的实际应用价值.
1 接缝定位
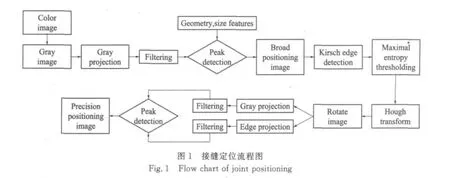
根据水泥混凝土路面接缝图像具有的特征,对接缝进行定位,具体步骤(见图1)为:先将水泥混凝土路面接缝的彩色图像变换为灰度图像,利用中值滤波过滤灰度图像中的随机噪声;利用图像的灰度特征对接缝进行粗定位,定位的边界是通过傅里叶正逆变换过滤投影数组中的低频分量,将接缝板边投影峰值凸显出来,根据接缝板边投影峰值提取包括接缝以及小部分水泥板边缘的图像;对上述图像进行Kirsch 边缘检测[7],增强接缝板边缘图像能量,并用最大熵阈值分割法[8]对图像做二値化处理,然后利用接缝的直线特征,用Hough变换[9]找到1条或2条接缝边缘,得到接缝的倾角,再通过图像的旋转校正,使接缝或垂直或平行于图像底边,最后在旋转后的图像内分别做灰度、边缘投影,并用一维傅里叶变换过滤高频分量,根据边缘和灰度投影的峰态找到接缝的准确位置,完成接缝的精定位.
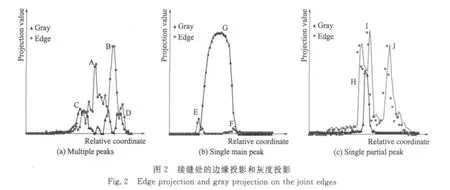
接缝处的灰度投影呈多峰或单峰状况(见图2),单峰又分为单主峰和单偏峰,单主峰和单偏峰可通过峰值和峰宽来辨别.一般,单主峰的峰值远大于单偏峰的峰值.
当接缝处的灰度投影呈多峰状况(见图2(a))时,接缝处的边缘投影一般有2个最大峰,但这2个最大峰可能并不对应接缝的2条边界.水泥混凝土路面接缝处的嵌缝料由于老化与水泥板块脱离,留下狭长的缝隙.另外,由于啃边的大量存在,接缝边界变得模糊.综合这些因素,将边缘投影最大2个峰外侧第1个灰度投影峰值作为接缝边界:首先确定边缘投影的2个最强峰A 峰和B峰,然后根据A 峰找到其左侧距离最近的灰度投影峰C 峰,由B 峰找到其右侧距离最近的灰度投影峰D 峰,最后由C 峰和D 峰所在位置确定接缝的边界.
接缝处灰度投影呈单主峰状况(见图2(b))一般是由于接缝处嵌缝料全部脱落,该处完全由空隙占据所造成的.在这种情况下,接缝边界由边缘投影的2个最大峰E,F峰位置确定.
灰度投影呈单偏峰(见图2(c))状况时,接缝边界由灰度投影单偏峰H 峰和距离H 峰较远的边缘投影J峰位置确定.
2 嵌缝料损坏类型
嵌缝料损坏类型分为5类,分别为基本完好型(Ⅰ)、少量失黏型(Ⅱ)、脱边型(Ⅲ)、断裂型(Ⅳ)和脱落型(Ⅴ),如图3所示.
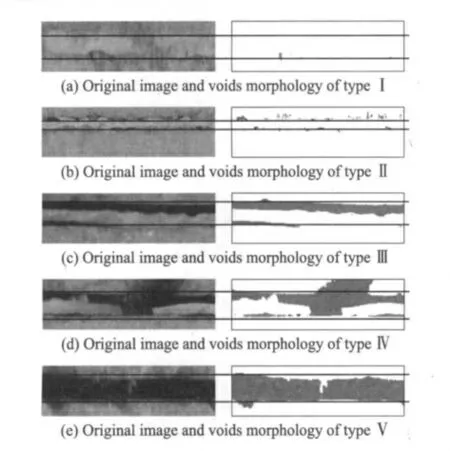
图3 嵌缝料损坏类型Fig.3 Types of joint sealant rupture
基本完好型(Ⅰ):嵌缝料与水泥板块之间只有极少量的空隙或完全没有空隙;少量失黏型(Ⅱ):嵌缝料与水泥板块之间存在少量的空隙;脱边型(Ⅲ):嵌缝料与水泥板块之间存在较大的空隙;断裂型(Ⅳ):嵌缝料断裂,但未从接缝中脱落;脱落型(Ⅴ):接缝中部分或全部的嵌缝料缺失.
3 嵌缝料损坏类型识别
3.1 嵌缝料损坏特征提取
提取嵌缝料损坏特征,分别为空隙相对宽度wr,空隙相对位置Pr,空隙外接矩形相对宽度wR,r和空隙投影相对值Vr;分类器采用线性直接判别式法分类器和BP神经网络分类器.
如图4,将接缝图像缝宽记作w;外接矩形宽度记作wR,i;垂直于接缝方向对接缝的每个位置做孔隙计数,记作N(x);孔隙的上边界纵坐标记作U(x);下边界纵坐标记作D(x);接缝方向的图像坐标记作x;接缝两边界纵坐标分别记作y+,y-.
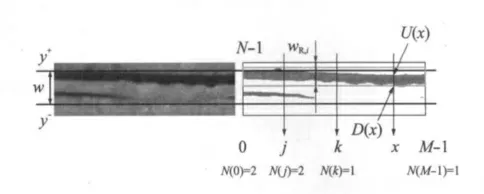
图4 嵌缝料损坏特征定义Fig.4 Definition of joint sealant rupture features
wr,Pr,wR,r和Vr定义如下:
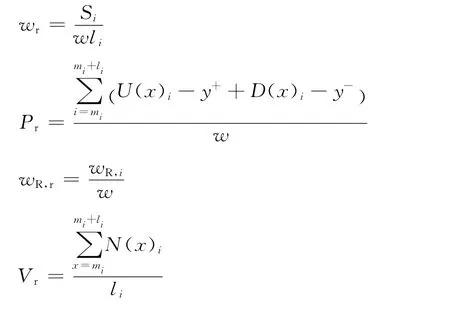
式中:mi为空隙i的起始位置横坐标;li为空隙沿接缝方向的长度;Si为每个孔隙区域面积;M,N 分别为图像的长和宽.
3.2 嵌缝料损坏类型识别流程
嵌缝料5种损坏类型中,基本完好和少量失黏型损坏的特征是孔隙较多,但孔隙非常小;脱边型损坏一般空隙宽度值较小,位置偏离接缝中心,N(x)有相当多的点大于1;断裂和脱落型损坏的空隙宽度、位置和N(x)值相似,但脱落型损坏的空隙长度远远大于断裂型损坏的空隙长度.考虑到脱边、断裂、脱落这3种损害类型可能共同存在,情况较复杂,因此首先将断裂和脱落型损坏看作为一类缺陷,利用BP神经网络和直接判别式法分类器按嵌缝料的空隙特征将脱边型损坏识别出来,再根据断裂与脱落型损坏的长度差异将两者分离.对于小空隙,只做统计.嵌缝料损坏分类流程绘于图5.在图5中,l1为小空隙过滤阈值,取0.01l,l为接缝长度;l2为脱落与断裂型损坏的分割阈值,取0.1l;l3为基本完好与少量失黏型损坏的分割阈值,取0.05l.由于1条接缝中小空隙、脱边、断裂和脱落可能同时存在,将各自缺陷长度分别累加到Lb,Lc,Ld和Le中.
3.3 模式识别分类器
从300余条接缝图像中选取了610个损坏样本,选取其中310个样本作为训练样本,300个作为验证样本.
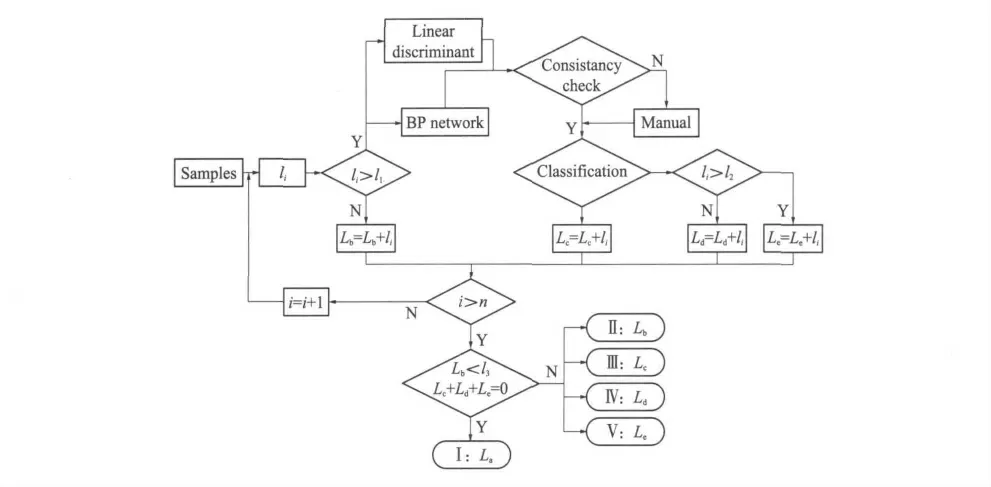
图5 嵌缝料损坏类型识别流程Fig.5 Flow chart of joint sealant rupture pattern recognition
3.3.1 线性直接判别式法
采用线性直接判别式法进行训练,训练特征参数为wr,Pr,wR,r,Vr,模式分为2种,脱边用0表示,断裂和脱落用1表示.经过训练,建立了多元回归方程:

式中:β0~β4为回归系数;ε为误差项.将训练样本及验证样本的回归误差分别绘于图6(a),(b).以0.5作为阈值统计识别错误率,结果见表1.
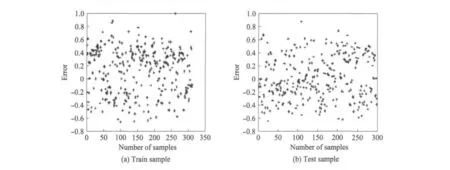
图6 线性直接判别式法误差Fig.6 Error of linear discriminant
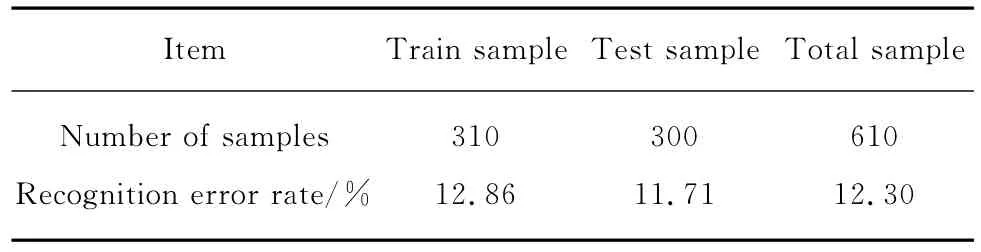
表1 线性直接判别式法识别错误率Table 1 Recognition error rate of linear discriminant
3.3.2 BP神经网络
(1)BP神经网络学习算法
采用动量梯度下降算法等12种BP 神经网络学习算法进行训练,训练参数列于表2,识别错误率如表3所示.通过比较训练样本、验证样本和总体样本的识别错误率,选用动量梯度下降算法进行下一步训练.
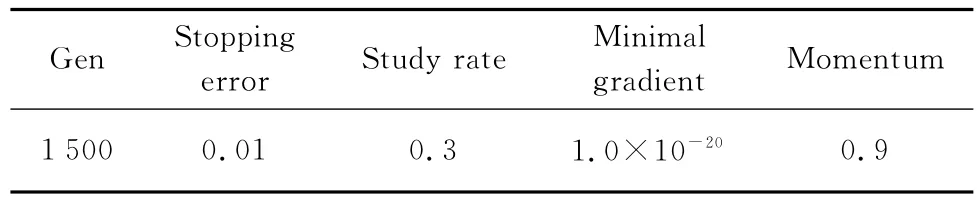
表2 BP神经网络训练参数Table 2 Train parameters of BP network
(2)隐层神经元个数
采用动量梯度下降算法,选用530个隐层神经元进行训练,训练结果见表4.通过比较训练样本、验证样本和总体样本的识别错误率,选用12个隐层神经元进行下一步训练.
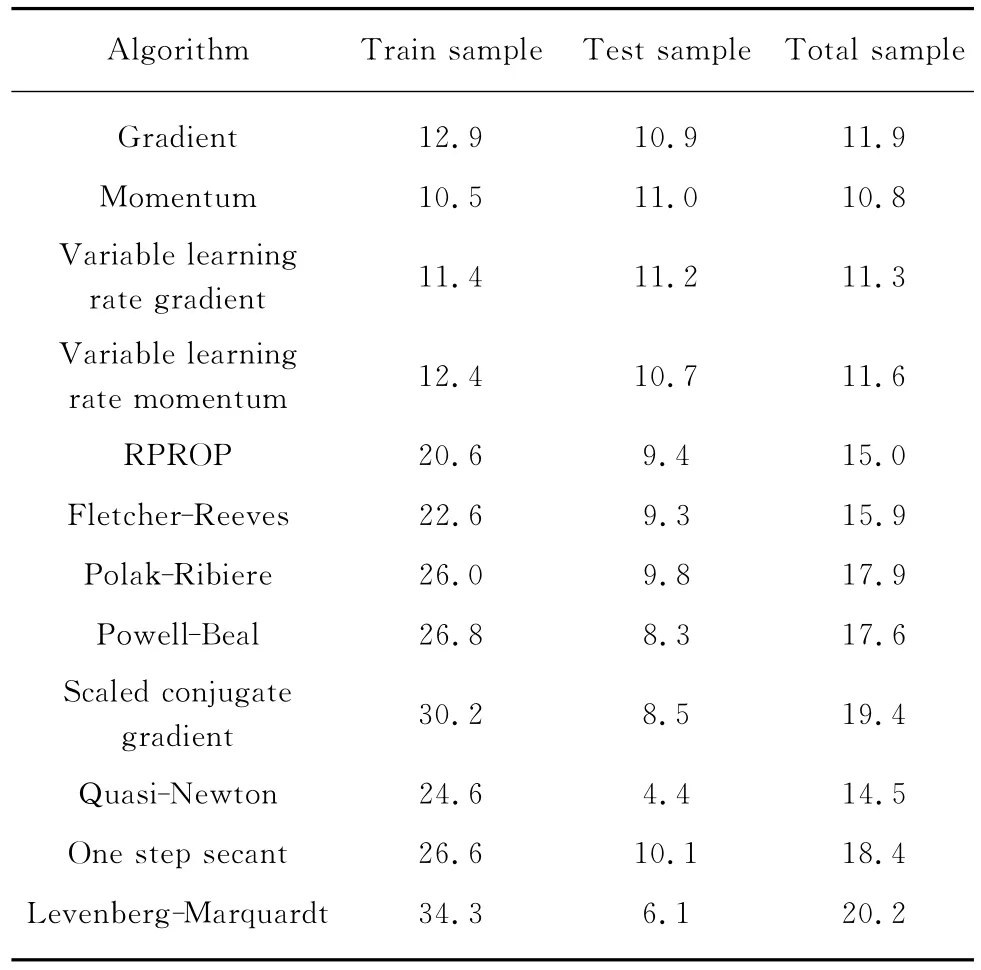
表3 不同BP神经网络学习算法的识别错误率Table 3 Recognition error rate for different BP network train algorithms %
(3)训练结果
采用动量梯度下降法,隐层神经元个数为12,训练代数调整为30000.多次训练后,BP 神经网络训练样本和验证样本误差分别如图7(a),(b)所示,BP神经网络识别错误率列于表5中.
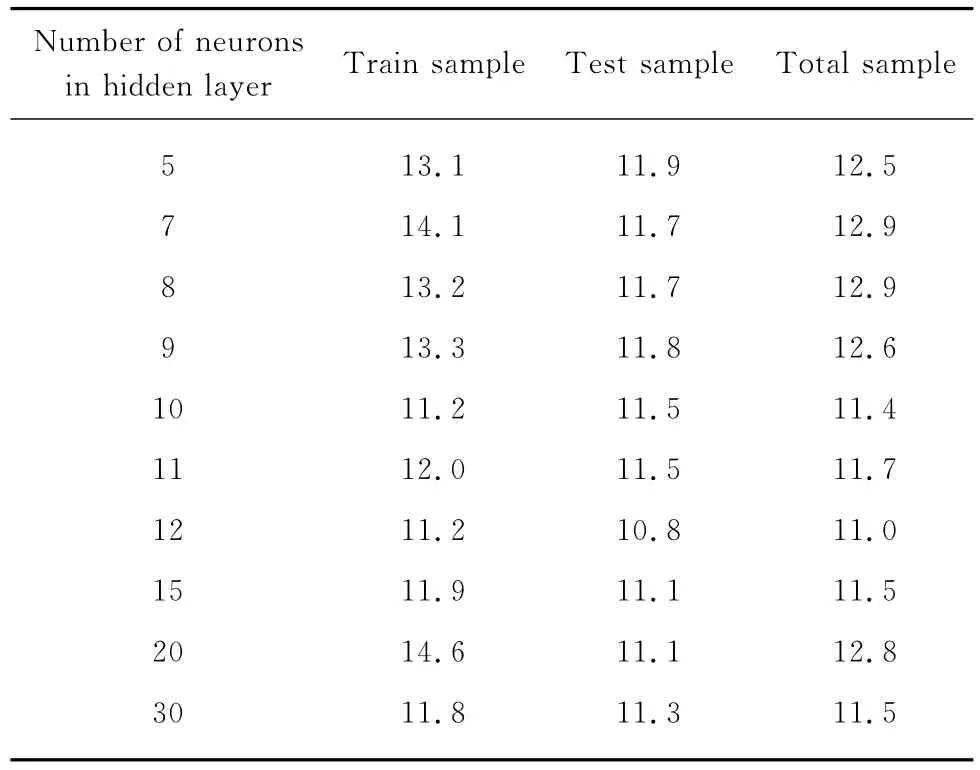
表4 不同隐层神经元个数下的识别错误率Table 4 Recognition error rate at different numbers of neurons in hidden layer %
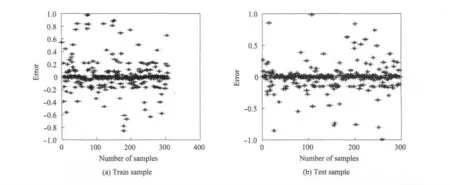
图7 BP神经网络误差Fig.7 Error of BP network
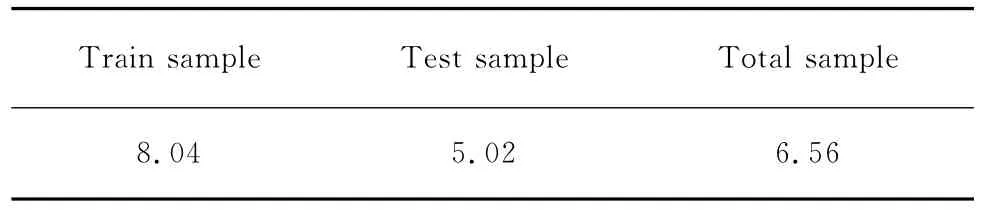
表5 BP神经网络识别错误率Table 5 Recognition error rate of BP network %
3.3.3 BP神经网络和线性直接判别式法综合识别BP神经网络和线性直接判别式法综合识别结果见表6.由表1,5,6可见,对总体样本而言,线性直接判别式法较BP神经网络法的识别错误率高出近1倍;两者综合识别时,其识别错误率较BP 神经网络法的稍低,为5.90%,两者判断不一致率为7.05%,即两者综合识别可达到94%的识别正确率,仅约7%需人工判断.
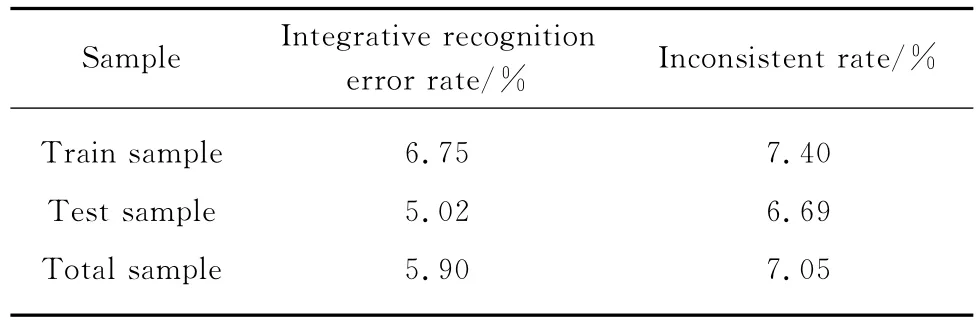
表6 BP神经网络和线性直接判别式法综合识别结果Table 6 Result of integrative recognition with BP network and linear discriminant
4 结语
(1)提出了1种基于数字图像的水泥混凝土路面嵌缝料损坏识别方法.该方法可弥补目前嵌缝料损坏评价方法的不足.
(2)基于数字图像的水泥混凝土路面嵌缝料损坏识别方法首先通过接缝定位技术实现嵌缝料损坏图像的提取,在此基础上,利用空隙相对宽度、空隙相对位置、空隙外接矩形相对宽度和空隙投影相对值4个特征进行损坏分类,识别分类器由BP 神经网络和线性直接判别式法构成.两者综合识别可达到94%的识别正确率,仅约7%需人工判断.
[1]JTG H20—2007公路技术状况评定标准[S].JTG H20—2007 Highway performance assessment standards[S].(in Chinese)
[2]SIMPSON A L,RAUHUT J B,JORDAHL P R,et al.Early analysis of LTPP general pavement studies data(Volume Ⅲ):Sensitivity analyses for selected pavement distresses(Report SHRP-P-393)[R].Washington,D C:National Research Council,1994.
[3]YU H T,SMITH K D,DARTER M I,et al.Performance of concrete pavements(VolumeⅢ):Improving concrete pavement performance(FHWA-RD-95-111)[R].Washington,D C:Federal Highway Administration,1997.
[4]HOERNER T E,DARTER M I,KHAZANOVICH L,et al.Improved prediction model for PCC pavement performance-related specifications(Final report)(FHWA-RD-00-130)[R].Washington,D C:Federal Highway Administration,2000.
[5]HOERNER T E,TARR S M,DARTER M I,et al.Guide to developing performance-related specifications for PCC pavements(Volume Ⅲ):Appendixes C through F(FHWA-RD-98-171)[R].Washington,D C:Federal Highway Administration,1999.
[6]PESHKIN D G,HOERNER T E,ZIMMERMAN K A.Optimal timing of pavement preventive maintenance treatment applications(NCHRP report 523)[R].Washington,D C:Transportation Research Board,2004.
[7]KIRSCH R.A computer determination of the constituent structure of biological images[J].Computers in Biomedical Research,1971(4):315-328.
[8]PUN T.A new method for gray-level picture thresholding using the entropy of histogram[J].Signal Processing,1980,2(3):223-237.
[9]刘文耀.光电图像处理[M].北京:电子工业出版社,2002:230-232.LIU Wen-yao.Optoelectronic image processing[M].Beijing:Publishing House of Electronic Industry,2002:230-232.(in Chinese)
猜你喜欢
中国卫生统计(2023年5期)2023-11-30 01:40:14
中等数学(2020年7期)2020-11-26 08:03:46
满族文学(2019年5期)2019-10-08 06:46:23
中学生数理化·中考版(2018年9期)2018-11-09 01:18:10
中学生数理化·中考版(2017年9期)2017-12-20 08:13:15
领导决策信息(2017年14期)2017-06-21 10:11:05
教师·中(2017年3期)2017-04-20 21:49:49
试题与研究·教学论坛(2016年27期)2016-08-11 14:57:08
教学研究与管理(2014年4期)2014-05-16 22:44:12
求学·文科版(2014年5期)2014-04-29 10:53:05