
木工榫槽加工机器人的研究
2013-07-05 05:52冯晓宁黄林秀吴盈盈
机电产品开发与创新 2013年3期
刘 宇,冯晓宁,李 璇,黄林秀,吴盈盈
(嘉兴学院 机电工程学院,浙江 嘉兴 314001)
0 引言
我国已成为世界上家俱生产大国,但是我国家俱企业依然是人力密集型企业。榫槽结构是家俱中使用极其广泛的结构,但是大多数企业依然依靠人工和简单的钻铣设备,一根一根地通过人工操作完成木料的榫和槽的加工,导致废品率高。针对这一现状,本文提出一种模块化直角坐标机器人结构型式的木工榫槽加工机器人,可以高效率、高精度地一次性完成多根木料的榫和槽的加工任务,为家俱制造企业提供了一种物美价廉的木工榫槽加工自动化设备。
1 木工榫槽加工机器人系统概述
榫槽加工机器人系统由机器人和工作台组成如图1所示,实物照片如图2所示。
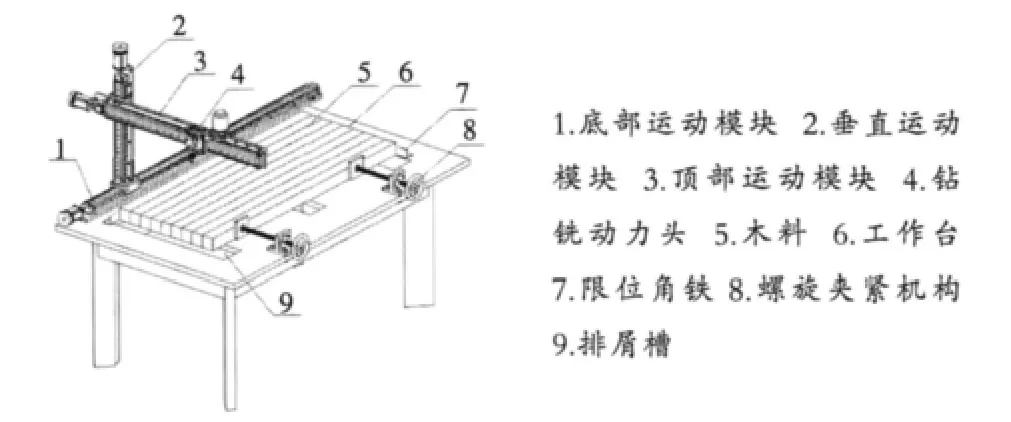
图1 榫槽加工机器人的三维图Fig.1 Tongue and groove processing three-dimensional map of the robot
机器人由直线运动模块、电机驱动模块、控制系统模块、操作工具模块组成。利用直线运动模块组成三维机器人,具有高可靠性、高速度、高精度的特点,可长时间连续工作。
图2 机器人实物照片Fig.2 Robot-kind photos
工作台用于木方的排放与夹紧,长和宽根据木料的长度和根数确定。工作台安装2个螺旋夹紧机构,对木料起到夹紧作用。工作台上开设三条排屑槽,可以顺利排出木料两端和中部的切削木屑。安装2根角铁,对木木料起限位作用。
机器人系统的伺服电机、联轴器、轴承及轴承座、滚珠丝杠、线性导轨等可以选购,其他零件可以自制,不仅精度可以满足木料加工的要求,而且价格低,因此具有物美价廉、维修方便的特点。
2 直线运动模块
机器人的机械结构由三个互相垂直的直线运动模块和一个钻铣动力头组成,底部运动模块1安装在工作台上。垂直运动模块2通过连接板安装在底部运动模块1的滑块上。顶运动模块3安装在垂直运动模块2的滑块上,钻铣动力头安装在顶部运动模块3的滑块上。
直线运动模块通过伺服电机带动滚珠丝杠旋转,将电机的旋转运动转换为滑块的直线运动。在伺服控制系统的控制下,各个直线运动模块相互配合,带动钻铣动力头运动,即可完成木料的榫或槽的加工工作。直线运动模块的三维结构如图3所示,主要零部件包括:
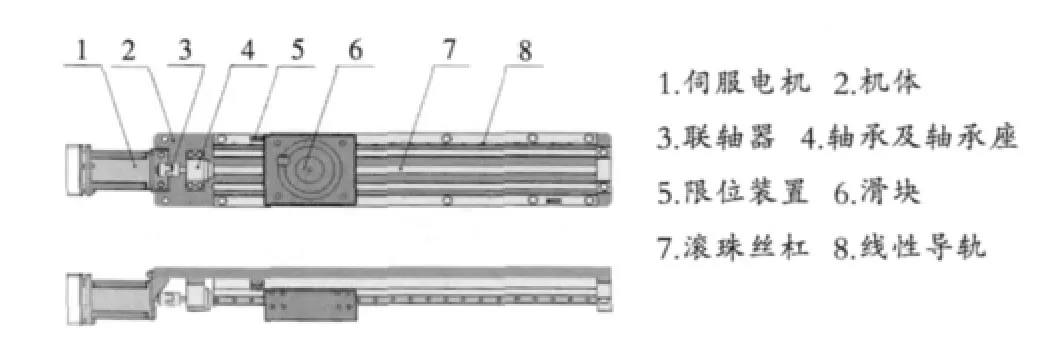
图3 直线运动模块Fig.3 Linear motion module
(1)机体:机体为运动轨道的安装支撑,具有高的直线度和平面度。底座采用重量轻、强度好的铝镁合金,通过机械加工及导轨安装面的磨削来充分保证其几何尺寸和位置精度。
(2)传动部件:采用滚珠丝杠机构作为传动部件,将电机的旋转运动转换为直线运动。底部直线运动模块由于行程较长,可以使用同步带代替丝杠传动。
(3)导向部件:采用线性导轨和滑块组成导向和运动部件。
(4)支撑部件:轴承及轴承座用于安装滚珠丝杠及驱动单元。滚珠丝杆的远支承侧为游动支撑,可消除由于发热引起的丝杠轴向伸缩变形。
(5)制动器:对于垂直的直线运动模块,需要采用制动器防止失电时下落。
(6)限位装置:利用行程开关作为直线模块运动极限行程的检测元件,当各轴运行到极限定位点时,行程开关发出信号,切断动力源并接通制动器,使各轴运动停止并制动。
3 操作工具模块
操作工具模块采用钻铣动力头,如图4所示。钻铣动力头由电机驱动,通过皮带传动带动钻夹作旋转运动。钻夹安装不同直径的模具铣刀,即可完成木料上的榫和槽的加工。
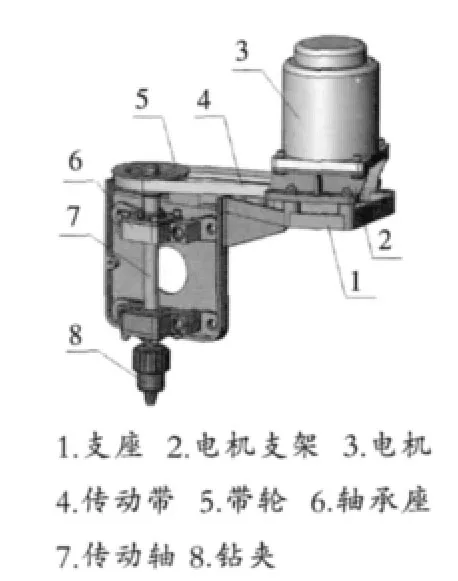
图4 钻铣动力头的三维图Fig.4 Three-dimensional map of the power head drilling and milling
4 电机驱动模块
三个直线运动模块均采用交流伺服电机驱动系统。驱动系统由伺服电机和驱动器两部分组成。电机和滚珠丝杆之间使用弹性联轴器相连,弹性联轴器具有足够的柔性,可补偿两轴的相对位移,减小制造、装配、调整带来的误差。并具有缓和冲击,保证电机和滚珠丝杆的正常工作和使用寿命的作用。
5 控制系统模块
PLC具备强大的运算处理以及运动插补功能,与专用机器人控制器相比市场价格低廉。因此本项目采用PLC控制方式,控制系统框图如图5所示。本文编制了完善的机器人控制指令,通过触摸屏进行加工参数设置,可以实现不同尺寸、形状和位置的榫槽加工任务。
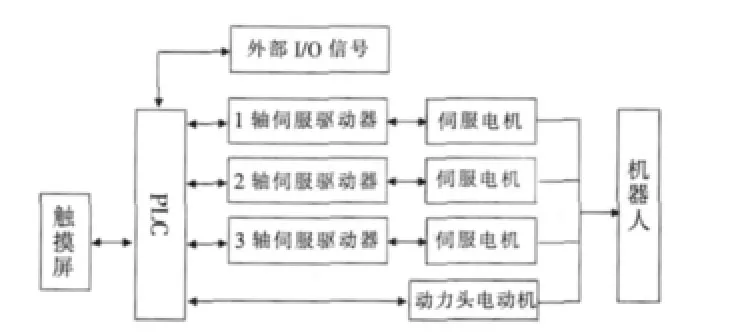
图5 控制系统框图Fig.5 Block diagram of the control system
6 结束语
本文提出一种模块化直角坐标机器人结构型式的木工榫槽加工机器人,可以高效率、高精度地完成木工榫槽的加工任务,为家俱制造企业提供了一种物美价廉的木工榫槽加工自动化设备。
[1]郭洪红.工业机器人技术[M].西安:西安电子科技大学出版社,2006.
[2]李刚,周文宝.直角坐标机器人简述及其应用介绍[J].伺服控制,2008,9.
[3]陈航,等.工业机器人模块化设计研究[J].机器人技术,2009,3.
[4]原魁.工业机器人发展现状与趋势[J].现代零部件,2007,1.
[5]刘永男,张国栋,于志俊.由直线运动部件组成的直角坐标装配机器人[J].组合机床与自动化加工技术,2002,7.
猜你喜欢
装备制造技术(2021年4期)2021-08-05
小读者之友(2021年6期)2021-07-29
少儿美术(2020年10期)2020-11-05
制造技术与机床(2019年11期)2019-12-04
小学教学(数学版)(2018年6期)2018-12-05
金色年华(2017年12期)2017-07-18
深圳职业技术学院学报(2015年5期)2015-11-30
机械制造与自动化(2014年1期)2014-03-01
机械与电子(2014年3期)2014-02-28
机械与电子(2014年1期)2014-02-28
