
一种基于正六面体划分的永磁球形电机
2013-07-05 01:06贾冕茜凌有铸方愿捷
滁州学院学报 2013年2期
贾冕茜,凌有铸,强 勇,方愿捷
常规单自由度电机只能绕一个轴做一维旋转,常规的多自由度运动往往由多个单自由度运动相互配合实现。多自由度电机在一个关节处可以代替多个单自由度电机,有效的简化机械臂结构。
多自由度电机在具备单自由度的电机不可替代的优势的同时,球形电机的结构,球面的划分,定子线圈和转子磁极分布,给球形电机走向应用带来了难题。目前,针对多自由度电机的结构开展了广泛的研究,日本产业技术综合研究所提出的基于正多面体的球形电机和基于SVPWM方式的控制器[1],新加坡南洋理工大学和国内北京航空航天大学联合研究的直流永磁球形电机和洛伦兹力的控制方式[2],国内的天津大学提出和设计基于Halbach阵列的球形电机[3],合肥工业大学完成了永磁球形步进电机的控制系统的研究[4-5]。三自由度电机的结构也因设计者的不同而不同,控制方法也因电机结构的不同而不同。电机的结构决定了控制方法实现的难易。
传统的永磁同步电机的矢量控制方法已经非常成熟,利用传统电机易于控制的优势,对日本产业技术总合研究所提出的正多面体球形电机进行改进设计,提出一种基于正六面体划分的球形电机结构。
1 基于正6-8面体划分的球形电机
永磁球形电机的结构类型繁杂,电机结构因设计者的不同而异,球形电机要实现多自由度,因此它在空间上应该可以绕任意轴旋转,但是球面的均匀划分对这种极需要空间对称性的结构设计方法提出了挑战。
鉴于球面只能被特定的内接正多面体均匀划分,日本产业技术综合研究所提出了一种基于正6-8面体的球形电机,该电机定子和转子均为球面,见图1。

图1 基于正6-8面体的球形电机实物图
转子是由6个球面轴承和定子球壳所支撑。转子球面内接正六面体,在正六面体和球面的交点处交替放置极性不同的永磁体,永磁体共计8个,材料均为稀土永磁钕铁硼,在球面正对正六面体的中心处各放置一个铁芯,如图2左图。转子内径为52mm,厚度为5mm,永磁体的直径为20mm,厚度为5mm,转子外表面被丙烯材料的球壳包围,球壳内径78mm,厚度为4mm。
定子球壳也是由丙烯材料制成,内外径分别为90mm、110mm,共25个电枢线圈被分布在球面位置。球面被正八面体划分,在定子上的虚拟八面体的6个顶点各有一个电枢线圈。定子上的虚拟八面体的12条棱上的中心处各分布一个电枢线圈。在球面正对正八面体的中心处各放置一个线圈(因为正八面体的上表面放置输出轴,球面正对正八面体的上表面不放置线圈,共计7个线圈),如图2右图。电枢线圈的内外径和厚度分别为5mm,20mm和8mm,线圈匝数为153。

图2 基于正6-8面体的球形电机定子转子结构图
鉴于正八面体的每一个面的三个顶点和三条棱中心处均有一个电枢线圈,这三对电枢线圈在空间互成120度,当电机内部转子的内接正六面体的一个面正好处于这三对电枢线圈的范围中时,交替的转子磁极和空间互成120度角的电枢线圈这种结构使得传统的单自由度电机的矢量控制成为可能。
该电机的一个俯视图如图3所示,电枢线圈1和1'构成线圈对(1,1');电枢线圈2和2'构成线圈对(2,2');电枢线圈3和3'构成线圈对(3,3'),给处于正八面体面中心的一个线圈通电,线圈吸引转子正六面体中心面的铁芯,两者构成电机的旋转中心轴,再给该面上的线圈对(1,1')、(2,2')和(3,3')通上三相正弦波,电机可以绕着指定的轴旋转,并且当正八面体的正对面同时施以同样的电流,则电机的转矩会加倍。
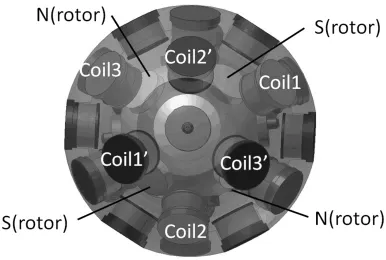
图3 基于正6-8面体的球形电机
基于正6-8面体划分的球形电机的控制策略可以应用普通单自由度电机的矢量控制,给选定旋转轴所在的电枢线圈通电吸引转子内部附近的电枢线圈,同时给旋转轴四周的6个电枢线圈按矢量控制方法使球形电机绕指定轴旋转。
2 基于正六面体永磁球形电机结构
基于正6-8面体划分的球形电机具备多自由度的优势同时,当旋转轴进行切换时,电机的运行变得不可控,处于正八面体中心的电枢线圈只吸引位于线圈附近的铁芯,吸引的过程严重影响了电机可控性,同时,输出轴的位置也因此产生了变化,造成电机运行的不稳定性和不连续性。在基于正6-8面体划分的球形电机的基础上,对该种电机进行改进。
该电机的结构图如图4所示,电机的定子和转子均为球面,转子球面被正六面体划分,与基于正6-8面体划分的球形电机一致。在正六面体的顶点上交替放置N、S极的永磁体,并在正六面体的每个面的中心位置放置一个铁芯。
定子球面依然被正六面体划分,球面被正六面体的6个面所截。在每个正六面体面和球体所交的圆上,每隔60°分布一个电枢线圈,同时中心处分布一个电枢线圈,在空间上组成互成120°的三个线圈对。图4展示了该电机定子的主视图、左视图和仰视图。主视图中标记中心吸附转子铁芯的电枢线圈为1号线圈。(11,11'),(12,12')和(13,13')构成1组中互成120°的三个线圈对。左视图中,标记吸附转子铁芯的中心电枢线圈为3号线圈。(43,13')、(12,42')和(31,31')构成了3组中的线圈对。在仰视图中,中心线圈为5号线圈。(41,11')、(52,52')和(53,53')构成了5组中的线圈对。在这种划分法中,例如12'和13号线圈处在分界线上的线圈是相邻两面公用线圈,在图中以绿色标出。在球面的顶端分布6个线圈组合5组线圈组是对称的,没有放置中心线圈,上表面在实际中被制成自由运动的输出轴的运动范围。

图4 电机主视图、左视图、仰视图
3 SVPWM控制策略
设计的这种电机的控制仍与传统的永磁同步电机的控制方法一样,用SVPWM产生旋转磁场,要使电机围绕1号轴进行旋转,给1号电枢线圈通电吸引对应的铁芯,给(11,11'),(12,12')和(13,13')线圈组通三相交流电,转子可以绕1号线圈轴向旋转,在转子位置回到初始位置后,给3号电枢线圈通电,选择旋转轴,并给(43,13')、(12,42')和(31,31')三组线圈供给三相交流电,就完成了1号线圈的正交轴的旋转。同样,给底部的线圈通电获得绕第三个正交轴的旋转。旋转后只需回到初始位置即可进行下次旋转。
因此电机的控制,必须先通过一个旋转轴选择器、SVPWM产生器和电压型逆变器,旋转轴选择器通过对指定旋转轴的判断,选择对应的线圈和电枢线圈组,通过SVPWM产生器,产生PWM波,控制逆变器实现电机的旋转。系统控制方框图如图5所示。

图5 基于正六面体球形电机电机控制系统框图
4 结束语
通过改进基于正6-8面体划分的球形电机的定子电枢线圈分布,基于正六面体的永磁球形电机,可以完成绕三个正交的旋转轴旋转。相较于正6-8面体划分的球形电机的结构有更好的稳定性,易控性和实用性。
[1] T.Yano.Basic Characteristics of a Hexahedron-Octahedron based Spherical Stepping Motor[J].Interna——tional Symposium on Power Electronics,2010,1748-1753.
[2] Lee K.M.,Pei J.and Roth R.,Kinematics analysis of a three-degree-of-freedom spherical wrist actuators[J].Mechatro-nics,1994,4(6):581-605.
[3] Xia Changliang,Guo Chen,Shi Tingna.A Neural Network I-dentifier and Fuzzy Controller Based Algorithm for Dynamic Decoupling Control of Permanent Magnet Spherical Motor[J].IEEE Transactions on Industrial Electronics,2010,57(8):2868-2878.
[4] 王群京.基于四元数组的球形永磁步进电机控制研究[J].微电机,2006,39(9):33-37.
[5] 王群京,陈丽霞,李 争,等.基于光电传感器编码的永磁球形步进电机运动控制[J].中国电机工程学报,2005,25(13):113-117.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25
哈尔滨轴承(2022年1期)2022-05-23
商业评论(2021年10期)2021-10-20
弹箭与制导学报(2020年1期)2020-07-09
石家庄铁路职业技术学院学报(2019年3期)2019-10-30
制造技术与机床(2019年8期)2019-09-03
弹箭与制导学报(2019年6期)2019-06-24
制造技术与机床(2018年9期)2018-09-19
数码设计(2018年1期)2018-05-23
中国水运(2017年6期)2017-06-13
