
表贴式永磁同步电机的抗饱和弱磁控制研究
2013-07-02 06:44杨立永付严伟
电气传动 2013年2期
杨立永,付严伟
(北方工业大学 机电工程学院,北京100144)
1 引言
随着科技的不断发展,高性能的永磁材料应用到电机中,使得永磁电机的抗去磁能力增强,因而电机允许流过较大的直轴去磁电流,为电机的高速弱磁行为提供了可能。 另外,永磁同步电机在宽调速范围和恒功率运行场合中有广泛应用。 因此永磁同步电机弱磁控制日益受到大家的关注[1]。
永磁同步电机的模型是一个多变量非线性强耦合系统,为了实现对其的控制,必须对转矩的控制参数进行解耦。 转子磁场定向控制是一种常用的解耦控制方法。 对于表贴式永磁同步电机Ld=Lq,因此电机的转矩方程可转化为Tem=pnλmiq[2]。
由于永磁转子参数是一个恒定的值,所以只要保持电流矢量is和d 轴垂直,就可以像直流电动机控制那样,通过调整直流量iq来控制转矩,从而实现控制参数的解耦。 永磁同步电机的转子表贴式结构可以减少转子直径,从而降低转动惯量。 尤其若将永磁体直接粘贴在转轴上,还可以获得低电感,有利于改善动态性能。
针对表贴式永磁同步电机在升速过程中所出现的饱和现象,本文采用的抗饱和弱磁控制策略使其得到了很好的解决。 实验结果表明,系统动态性能好,并具有较宽的调速范围。
2 永磁同步电机弱磁控制理论
2.1 永磁同步电机数学模型[3]
永磁同步电机调速系统最常用的是旋转坐标系(d-q)上的模型方程,它不仅可以分析PMSM的稳态运行性能,也可以分析其瞬态性能。
通常情况下,dq 坐标系下电机的电压方程为

磁链方程为

式中:p 为微分算子,p=d/dt;ud,uq分别为dq 轴定子电压;id,iq分别为直轴、交轴电流;Ld,Lq分别为直轴、交轴电感;Rs为定子电阻;ωe为转子电角速度;Ψf为永磁体产生的磁链。
当PMSM 运行稳定时,电压方程可以简化为

对于转子表贴式永磁同步电机而言,通常情况下,Ls=Ld≅Lq。
2.2 电压限制圆和电流限制圆[3]
电机的加速和负载是由其电压限制和电流限制决定的。 由umax表示的电压最大值是由直流母线电容和PWM 方法决定的。由imax表示的电流最大值则受限于逆变器和实际电机参数。 因而可用以下方程表达

忽略定子电阻压降后,可得如下电压方程

将式(5)带入式(4),可推导出电压限制方程

在id,iq平面上绘制出方程式(4)与式(6)的曲线,可以得到电机运行时的电流与电压极限轨迹,见图1。 图1中实线圆代表的是电流限制曲线,虚线圆代表的是电压限制曲线。 电压限制圆依赖于式(6)中的运行速度,不同的速度就会有不同的电压限制圆。 此外,电压限制圆是以坐标(-Ψf/Ls,0)为圆心,由于小定子电感,该点在电流限制圆外。

图1 id-iq坐标系上的电压限制圆和电流限制圆Fig.1 Voltage limit circle and current limit circle in id-iqcoordinate system
2.3 弱磁控制基本原理[4]
对于永磁同步电机来说,当电机在升速过程中电动机相电压达到直流侧电压最大值时,通过调整电压获得更高的转速已经不太可能,因此不能采用id=0 控制、最大转矩/电流比控制等常用的电流控制方法,需要采用特殊的控制方法——弱磁控制。
由于逆变器直流侧电压达到最大值后会引起电流调节器的饱和,为了获得较宽的调速范围,在基速以上高速运行时实现恒功率调速,需要对电动机进行弱磁控制。
PMSM 弱磁控制的思想源自于它励直流电动机的调磁控制,当他励直流电动机端电压达到最大电压时,只能通过降低电动机的励磁电流,改变励磁磁通,在保证电压平衡的前提下,使电动机能恒功率运行于更高的转速。 即他励直流电动机可以通过降低励磁电流达到弱磁升速的目的。对于PMSM 来说,励磁磁动势因永磁体产生而无法进行调节,只能通过调节定子电流,即增加定子直轴去磁电流分量来维持高速运行时的电压平衡,达到弱磁升速的目的。
将式(5)代入式(4),得到电压平衡方程如下所示:

由电压平衡方程可以看出当电动机电压达到逆变器输出电压的极限时,即us=ulim,如果继续升速就只能靠调节id和iq来实现,这就是电动机的“弱磁”运行方式。 增加直轴去磁电流分量id和减少交轴电流分量iq,以维持电压平衡,从而得到弱磁效果,前者弱磁能力与直轴电感相关,后者与交轴电感相关。 为保证相电流不超过极限值,增加id的同时必须相应减少iq。 因此一般是通过增加id来实现弱磁升速的。
PMSM 弱磁运行时的弱磁能力不仅与逆变器容量和直流侧电压有关,而且与电机本身的参数有关。 当控制器的极限输出电压ulim和电流ilim确定后,电动机对系统运行性能影响较大的参数有电感与磁链。
3 抗饱和的弱磁控制策略[5-6]
当电流调节器饱和时,电动机的实际电流不等于给定电流,实际供电电压也不等于电流调节器的输出电压,因此可以通过电流调节器输出的定子电压幅值来判断电流调节器是否饱和,如果电流调节器输出的电压幅值不等于实际电压的幅值,则可以认为电流调节器饱和,从而进行如此控制。
带有电压外环的弱磁调速系统的实现方案如图2所示,该系统主要是由电流给定发生器、电压外环及电流给定值修正3 部分组成。 系统利用电流调节器的饱和信息来实现对电机的弱磁调速。如果在一定的电流给定下,电流调节器稳态时出现饱和现象,这时逆变器输出最大供电电压,在此工况下应该对电机的调速系统进行弱磁控制。

图2 永磁同步电机抗饱和弱磁控制系统的实现方案Fig.2 Implementation scheme of the anti-windup for flux-weakening control system of PMSM
3.1 电流给定值发生器
电流发生器的作用是,由速度调节器ASR 根据转速控制误差输出定子电流的幅值给定值|is|*,然后依据MTPA 控制方式,产生两个电流分量的给定值i*d,i*q。
由于本文使用的是表贴式永磁同步电动机,其d 轴电感和q 轴电感近似相等,故可知发生器的两个给定值为

3.2 电压外环
电压外环是一个闭环调节系统,系统的给定值为逆变器能够输出的最大电压矢量幅值u*0,闭环系统的控制目的就是使u*0≤Um,也就是使电机在运行过程中满足电压限幅的要求[7]。
Um和u*0的产生办法是

式中:KV为比例系数,(等功率变换);u*d,u*q分别为d,q 轴电流调节器输出的电压给定。
Um和u*0之间的误差通过一个积分环节构成的控制器,控制器的输出再通过一个限幅环节,产生信号id*f,限幅环节的输入输出关系为

式中:u 为限幅环节的输入,即控制器的输出;idf_lim为idf的限幅值。
3.3 电流给定值
电流给定发生器产生的i*d和i*q需要经过修正后,才能作为真实的d 轴和q 轴电流给定值id*_c和。 二者的关系为

式中;iq_lim为q 轴电流给定限幅值。
在此控制系统中,电压环是通过增加电压控制外环使给定电流矢量(i*d_c,i*q_c)自动地位于电压限制圆上或圆内,以满足电压限制的要求。
4 实验结果及其分析
Matlab 仿真实验的基本参数如下:额定功率为1.2 kW 的永磁同步电机,三相4 极对数,额定转速2 000 r/min,定子电阻0.958 5 Ω,电感0.005 25 H,永磁磁链为0.182 7 Wb。
当电机转速给定为1 400 r/min,且零负载转矩时,可得如图3、图4所示波形。
当电机转速给定为2 500 r/min,且零负载转矩时,可得图5、图6波形。
从图3、 图4、 图5及图6可以清晰地观察到,当系统在电机的升速过程中捕捉到饱和信息后,使用抗饱和策略对给定电流进行调节,不仅得到了动态性能较好的闭环转速,而且消除了饱和现象。

图3 电机的id与iq波形(n=1 400 r/min)Fig.3 Motor waveforms of idand iq(n=1 400 r/min)

图4 id-iq坐标系下定子电流轨迹(n=1 400 r/min)Fig.4 The trajectory of stator current in id-iqcoordinate system(n=1 400 r/min)
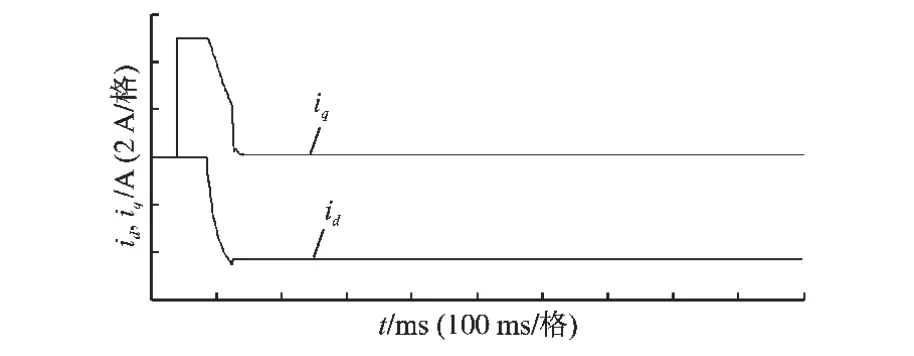
图5 电机的id与iq波形(n=2 500 r/min)Fig.5 Motor waveforms of idand iq(n=2 500 r/min)

图6 id-iq坐标系下定子电流轨迹(n=2 500 r/min)Fig.6 The trajectory of stator current in id-iqcoordinate system(n=2 500 r/min)
实验平台为GK6 电机,基速为2 000 r/min。采用控制策略前后的实验对比。
电机运行在1 400 r/min 时的电流波形见图7,此时未进行弱磁控制。 电机运行在2 500 r/min时的相关电流波形见图8,在此升速过程中不仅实现了弱磁控制,同时消除了系统的饱和现象,这与Matlab 仿真的波形非常接近,从而验证了本抗饱和弱磁控制策略的有效性。

图7 未弱磁时的定子电流id与iq波形Fig.7 Waveforms of the stator current idand iqwithout flux-weakening control

图8 弱磁时的定子电流id与iq波形Fig.8 Waveforms of the stator current idand iqwith flux-weakening control
5 结论
本文采用的控制策略的特点是利用调节器的饱和信息来实现永磁同步电动机的弱磁控制,既很好地消除了电机运行中所出现的电流调节器的积分饱和现象,又实现了弱磁升速,具有实现容易和最大利用转矩输出能力的特点,同时增加了电机的调速范围。
[1] 刘婷婷,谭彧,吴刚,等.基于SVPWM 的高速永磁同步电机控制系统的研究[J].电力系统保护与控制,2009,37(12):11-12.
[2] 颜钢锋,李锋.弱磁控制在变频矢量控制系统中的应用[J].工程设计学报,2005,12(2):101-102.
[3] 李华德,李擎,白晶.电力拖动自动控制系统[M] .北京:机械工业出版社,2009.
[4] 冷再兴.永磁同步电机弱磁调速控制[D].武汉:华中科技大学,2006.
[5] Nicola Bianchi,Thomas M Jahns.Design,Analysis,and Control of Interior PM Synchronous Machines [C]∥IEEE Industry Applications Society,2004:1-29.
[6] Sue Shinn-Ming,Pan Ching-Tsai,Hwang Yuan-Chuen.A New Field-weakening Control Scheme for Surface Mounted Permanent-magnet Synchronous Motor Drives [C]∥IEEE Trans.on Industrial Electronics and Applications,2007:1515-1520.
[7] 盛义发,喻寿益,桂卫华,等.轨道车辆用永磁同步电机系统弱磁控制策略[J].中国电机工程学报,2010,30 (9):75-76.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
宇航计测技术(2018年3期)2018-09-08
光学精密工程(2016年3期)2016-11-07
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
汽车与新动力(2014年2期)2014-02-27
