
用于风力机模拟的DTC 改进方法研究
2013-07-02 06:44刘鑫曲延滨
电气传动 2013年2期
刘鑫,曲延滨
(1.聊城供电公司,山东 聊城252000; 2.哈尔滨工业大学(威海)信息与电气工程学院,山东 威海264209)
1 引言
风力机模拟实验对风力发电技术的发展有着重要的推进作用[1]。 直流电机目前较多地用于风力机的模拟[2]。随着异步电机控制技术的发展,异步电机已经能够实现与直流电机相媲美的控制性能,在风力机模拟领域正逐渐取代直流电机。 文献[3]采用矢量控制的方法对异步电机进行控制来实现风力机的模拟。 文献[4]采用直接转矩控制的方法实现异步电机的风力机模拟,相比矢量控制,这种方法控制简单,但是在低速时存在转矩脉动大、电流畸变等不足。 文献[5]采用离散空间矢量调制的直接转矩控制对风力机进行模拟,改善了模拟效果,但增加了系统的开关频率,使得系统对开关器件的要求提高。本文选用异步电机直接转矩控制的方式对风力机进行模拟,针对传统直接转矩控制以及风力机模拟的特点,提出了一种应用于风力机模拟的改进直接转矩控制方法,为风力机异步电机模拟提供了新的控制思路。
2 直接转矩控制改进方法研究
直接转矩控制方式无需进行坐标变换即可实现转矩与磁链的解耦控制,方法简单,动态性能好,适于异步电机的风力机模拟,但它也存在一些问题。 为了改善基于直接转矩控制的风力机模拟的模拟效果,有必要对直接转矩控制进行分析。
2.1 传统直接转矩控制
在不考虑定子电阻压降的情况下,根据异步电机的数学模型可得到定子磁链与定子电压的关系:

由式(1)可知,定子磁链可以近似看作定子电压的累积作用。 异步电机的电磁转矩表达式可以写为[6]
式中:θsr为磁通角;σ=1-L2m/LsLr。
通过对式(1)和式(2)的分析,可以得到如下直接转矩控制的控制律,即在保证定子磁链大小不变的情况下:1)若要增大电磁转矩,需加载有效电压空间矢量,使得定子磁链转速增大,磁通角θsr增大,从而使转矩增大;2)若要减小电磁转矩,需加载反向电压空间矢量,使得定子磁链转速下降,磁通角θsr减小,从而使转矩减小。
由图1可以确定电压空间矢量分布及扇区设置。 直接转矩控制系统结构如图2所示,系统根据给定电磁转矩与实际电磁转矩观测值相比较得到转矩误差,通过滞环比较得到转矩的开关控制信号,之后经过查表在每个采样周期选择合适的定子空间电压矢量,从而确定逆变器的开关状态,使异步电机的电磁转矩快速跟踪外部给定的电磁转矩。

图1 电压空间矢量分布及扇区设置Fig.1 The distribution of voltage vectors and sectors

图2 直接转矩控制原理图Fig.2 Schematic diagram of direct torque control
2.2 传统直接转矩控制存在的问题及分析
异步电机在定子坐标系下的数学模型为[7]
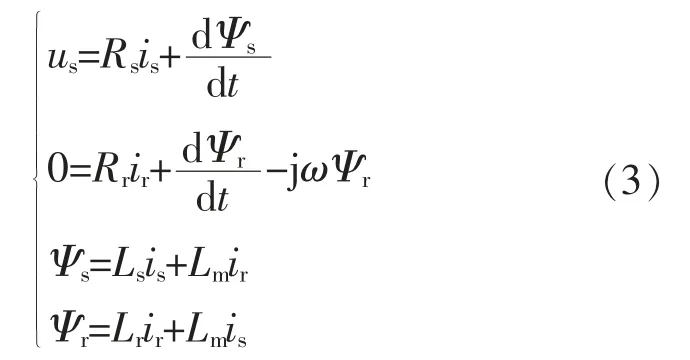
式中:Rs,Rr为定转子电阻;Ls,Lr,Lm分别 为定转子电感和互感。
由式(3),通过消去其中的电流量,可以得到电机磁链的状态方程:
其中 τr=Lr/Rrτs=Ls/Rs
设采样时间为△t,可将式(4)进行离散化,得到的结果如下:

由式(2)可知k+1 时刻电磁转矩为

将式(5)中Ψs(k+1)与Ψr(k+1)带入式(6),可得:

由式(7)可以发现电磁转矩的变化量主要受到两方面因素的影响:第1 部分,即式(7)中的-T这一部分转矩的变化量仅与上一时刻的电磁转矩以及采样时间有关,因此不是转矩脉动产生的主要原因;第2 部分,即式(7)中的这一部分与定转子磁链、电压空间矢量以及机械角速度等实时变化的量有关系,所以是转矩脉动产生的主要原因[8]。
2.3 对直接转矩控制的改进
当异步电机输出转矩在给定转矩附近脉动时,系统近似达到稳定,此时机械角速度ω 不变,可以认为输出转矩与系统给定转矩近似相等,由异步电机电磁转矩公式,有:

经整理,可得:

在式(9)中,等式右侧为常数,因此Ψs×Ψr恒定。此时机械角速度ω 恒定,则有(jωΨs)×Ψr恒定。由式(7),可得:

对式(10)进行整理,可得:

式中:C 为常数。
基于以上的分析,本文采用在一个采样周期里向有效电压空间矢量当中插入零开关矢量的方法实现对电压空间矢量的减小,来实现减小电机转矩脉动的目的。 例如,在某一采样周期内,若控制系统采用“110”的电压空间矢量对异步电机进行励磁,插入零矢量“000”的方法如图3所示。

图3 插入零矢量示意图Fig.3 Schematic diagram of the insert zero vector
虽然向空间电压矢量中插入零矢量可以减小电机电磁转矩的脉动,但是这样会使得系统从一个状态到另一个状态的动态过程变长,当给定转矩变化很大时,系统甚至无法达到稳定。 为了解决这一问题,本文设计了一种转矩控制双层滞环比较、查表环节选择性插入零矢量的改进直接转矩控制方法。 本文设计的转矩控制双层滞环比较如图4所示。

图4 转矩控制双层滞环比较Fig.4 Double-deck hysteresis comparison of torque control
在转矩偏差较大时,系统不向有效电压空间矢量中插入零矢量,保证系统动态响应过程的快速性;在转矩偏差较小时,系统向有效电压矢量中插入零矢量,使得稳态输出转矩脉动减小。 具体的开关选择表如表1所示。

表1 改进后的开关选择表Tab.1 The improved switch table
表1中:FK 表示磁链滞环比较的输出;TK表示转矩滞环比较的输出;“1” 表示电压矢量U0(100);“2”表示电压矢量U60(110);“3”表示电压矢量U120(101);“4”表示电压矢量U180(011);“5”表示电压矢量U240(001);“6”表示电压矢量U300(101);“z”表示零电压矢量。
3 风力机模拟的实现
风力机模拟的基本思想是根据实际风力机的特性,选用合适的电动机与控制策略,使其输出的转矩(功率)与转速的关系同实际风力机相应的关系一致。 因此,风力机的模拟不是常规的电机速度控制,而是对电机的输出转矩(功率)进行控制。 应用改进的直接转矩控制方法的风力机模拟系统如图5所示。

图5 风力机模拟系统结构原理图Fig.5 Schematic diagram of the wind turbine simulation system
用户通过计算机上的人机交互界面设置风力机模拟的给定风速,之后计算机根据电机转速的检测值以及风力机特性计算出风力机需要输出的机械转矩并通过串行通讯口将此转矩当作给定转矩送给DSP 控制器,控制器通过改进的直接转矩控制算法产生相应的控制脉冲对不可控整流加逆变变流器进行控制,变流器对异步电机进行励磁使其输出转矩与风力机的输出转矩一致,即实现了对风力机的模拟。
4 仿真分析
4.1 仿真对比分析
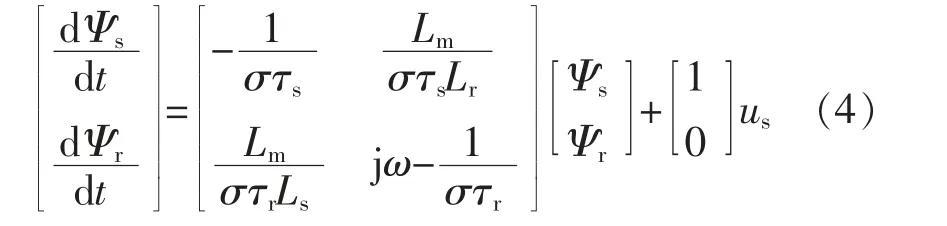
在Matlab/Simulink 中搭建鼠笼式异步电机直接转矩控制的仿真平台,电机参数如下:PN=4 000 W;UN=380 V;fN=60.5 Hz;Rs=3.65 Ω;Ls=0.006 H;Rr=4.35 Ω;Lr=0.007 6 H;Lm=0.2 H;p=2;J=0.014 kg·m2。 分别运用传统直接转矩控制方式以及本文改进的直接转矩控制对电机输出的电磁转矩进行控制,给定转速为电机的额定转速1 800 r/min,给定转矩为17 N·m,得到的转矩偏差对比仿真结果如图6和图7所示。 图6为传统直接转矩控制输出的电磁转矩偏差,偏差范围在-1.5~1.7 N·m 之间;图7为改进直接转矩控制输出的电磁转矩偏差,偏差范围在-0.7~1.4 N·m 之间。 通过对比,可以看出,改进后系统输出电磁转矩的转矩脉动得到了明显的抑制,这有利于异步电机风力机模拟效果的改善。
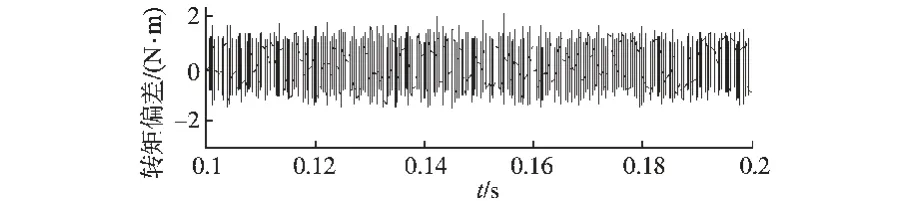
图6 传统直接转矩控制输出的电磁转矩偏差Fig.6 Output torque deviation of traditional DTC

图7 改进直接转矩控制输出的电磁转矩偏差Fig.7 Output torque deviation of improved DTC
4.2 改进方法的风力机模拟仿真
应用本文提出的改进直接转矩控制方法,对异步电机的风力机模拟进行了仿真,选用模拟的风力机的型号为FD4.0-3000-E,参数如下:额定功率为3 000 W;风轮直径为4.5 m;启动风速为2 m/s;额定风速为10 m/s;安全风速为6 m/s;额定转速为220 r/min;由于电机额定转速为1 800 r/min,所以齿轮箱齿数比为8.2∶1。在Matlab/Simulink 中搭建模拟系统的仿真平台,在额定风速10 m/s 下,使电机转速从零增加,仿真结果如图8所示。 风力机的输出即为风速10 m/s 时风力机的转矩输出特性曲线,通过对比分析,可以得到如下结论:异步电机输出转矩与风力机的输出一致,偏差范围大致在-0.8~1.5 N·m 之间,转矩偏差较小,因此本文提出的改进直接转矩控制可以用于风力机的模拟。
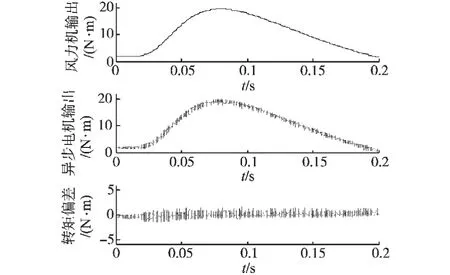
图8 模拟系统的仿真结果Fig.8 Simulation results of the analog system
5 结论
本文针对应用于风力机模拟的异步电机直接转矩控制方法存在的转矩脉动问题进行了分析,通过向电压空间矢量中插入零矢量以及采用转矩双层滞环比较的方法对传统方法进行了改进,使转矩脉动得到了明显的抑制,将这种改进方法应用于风力机模拟,可以改善异步电机的模拟效果。
[1] 王超,黄文新,王前双.基于异步电机的风力机特性模拟[J].电力电子技术,2010,44(6):7-9.
[2] 姜鑫.风力机特性分析和模拟装置开发[D].杭州:浙江大学,2011.
[3] 乔明,林飞,孙湖,等.基于异步电机的风力机模拟实验平台的研究[J].电气传动,2009,39(1):40-43.
[4] 陈彬,宋平岗,何鑫.基于直接转矩控制的风力机模拟器研究[J].防爆电机,2007,42(4):18-21.
[5] 刘钰山,葛宝明,毕大强,等.基于改进的直接转矩控制的风力机模拟系统[J].电力系统保护与控制,2010,38(18):140-144.
[6] Jihen Arbi,Manel Jebali-Ben Ghorbal,Ilhem Slama-Belkhodja.Direct Virtual Torque Control for Doubly Fed Induction Generator Grid Connection[J].IEEE Transactions on Industrial Electronics,2009,56(10):4163-4173.
[7] 张子才,黄良沛,龚争理,等.三相异步电机切换过程的动态分析与系统仿真[J].电气传动,2010,40(12):21-25.
[8] 魏东东.异步电机直接转矩控制策略比较与实验研究[D].合肥:合肥工业大学,2008.
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
测控技术(2018年5期)2018-12-09
电测与仪表(2016年10期)2016-04-12
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
振动工程学报(2015年1期)2015-03-01
太阳能(2015年6期)2015-02-28
电测与仪表(2014年17期)2014-04-04
电测与仪表(2014年11期)2014-04-04
组合机床与自动化加工技术(2014年10期)2014-03-01
