
一种电动汽车用异步电机弱磁控制方法
2013-07-02 06:45朱小燕王群京漆星谢芳周成李国丽
电气传动 2013年4期
朱小燕,王群京,漆星,谢芳,周成,李国丽
(安徽大学 电气工程与自动化学院,安徽 合肥230601)
1 引言
目前,异步电机因价格低廉、可靠性高、维护简单、控制技术成熟而被广泛应用于电动汽车驱动系统,尤其在大功率场合中占据重要地位。 电动汽车的电机驱动具有调速范围宽,加减速性能好,动态响应快等特性[1]。
异步电机的驱动电压包含定子漏感压降和反电动势,当磁通保持恒定时,反电动势与转速成正比。 随着电机转速上升超过额定转速后,定子电压也需要超过额定电压值,然而由于直流侧电压和逆变器的限制,无法提供更大电压。 如果提高直流电压,不仅增大硬件成本,而且会超出电机的额定电压,长期运行将损害电机。 因此合适的方法是减小异步电机的励磁。
已有的弱磁方法可以归纳为:1)1/ωr方法;2)电压闭环控制方法[2-3];3)查表法[4]。1/ωr方法为传统的弱磁方法,当超过额定转速时,电机励磁与转速成反比例的减小。 该方法易于操作,但开环弱磁方法无法适应负载的变化,提供最大输出转矩,也不能充分利用直流侧电压。
电压闭环控制方法是将旋转坐标系电压与电压最大值(空间矢量方法的最大值为Vdc/)形成闭环,控制电机励磁电流。 该方法克服了对电机参数的敏感,有较强的鲁棒性,但转矩电流和励磁电流耦合强,电流调节器易饱和。
文献[4]的查表法是将空间矢量调制的零开关时间T0和转矩指令用作励磁电流查表索引(LUT)。同时,励磁电流和转矩指令的反馈信号作为转矩电流的查表索引。 另外,最大转差频率值也来源于LUT。 但这些弱磁表格依赖精确的电机参数。
本文从电动汽车高速运行的实际出发,提出的一种电压轨迹弱磁控制方法,能够在不查表的情况下充分利用直流电压,提供较大转矩。 该方法用脉宽调制脉冲的开关周期与导通时间之差控制励磁电流[5],当导通时间大于开关周期时进入弱磁控制。 在理论分析的基础上构建系统仿真模型,然后在电动汽车用异步电机驱动平台上编写软件实现算法,仿真与实验结果验证了该方法的有效性。
2 理论分析
按转子磁链定向的异步电机在稳态运行时,旋转坐标系下的电磁转矩为[6]

式中:p 为极对数;Lm为互感;Lr为转子电感。
2.1 电压和电流约束条件
受电机和逆变器容量的限制,驱动系统的电压和电流要遵循下式的约束条件:

式中:Imax为电机和逆变器的额定电流的阈值;Vmax为电压阈值,与PWM 调制策略相关,本文采用电压空间矢量SVPWM 调制方式,Vmax= Vdc/。
当电机高速运行时具有较高的反电动势,定子电阻压降可以忽略不计,式(2)中的电流限制条件可写作:

式(3)所示的电流限制公式在dq 电压坐标系中是一簇焦点以同步角频率ωe为函数的椭圆曲线,其曲率半径与同步角频率成正向关系。 图1所示的3 条椭圆曲线ω1<ω2<ω3,即随着ωe的增大,为维持转矩电流,逆变器需要输出更高的电压。 而式(2)第1 式的电压限制公式表示为一个圆。图1中电压限制曲线和电流限制曲线所包含的公共部分即为电压矢量d 轴分量和q 轴分量的可运行区域。
2.2 弱磁Ⅰ区
当电机超过额定频率运行,开始采用弱磁控制策略以给定磁链电流的大小。 在弱磁Ⅰ区内,由式(1),dq 电压分量乘积最大值,即最大输出转矩点为电压圆形曲线与电流椭圆曲线的交点。 转矩电流的限制为

2.3 弱磁Ⅱ区
随着电机同步频率继续增大,电流限制椭圆继续向外扩展(见图1),与电压圆交于D 点,转矩曲线TD<TC,D 点不是最大转矩点。此后最大转矩不受同步角频率影响,维持在C 点。 此时,usd=最大转矩电流为

3 电压轨迹法
图2所示为引入电压轨迹弱磁控制的电动汽车用异步电机矢量控制系统结构框图[7]。 以逆变器PWM 控制的开关周期(Ts)与导通时间(Ta+Tb)之差控制励磁电流[8]。 当逆变器控制脉冲的有效导通时间小于开关周期时,弱磁调节器(FWR)输入为正值,输出被限制为0,给定励磁电流id*s就是额定励磁电流Ids_rated。 此时电机运行于恒转矩区。 当导通时间与开关周期相等,即电压轨迹达到空间矢量调制的六边形。 因此,直流电压能够被充分利用,从而增大最大输出转矩能力。 一旦导通时间大于开关周期,弱磁调节器输出负值,给定励磁电流为弱磁控制器输出与额定励磁电流之和,电机进入弱磁区。
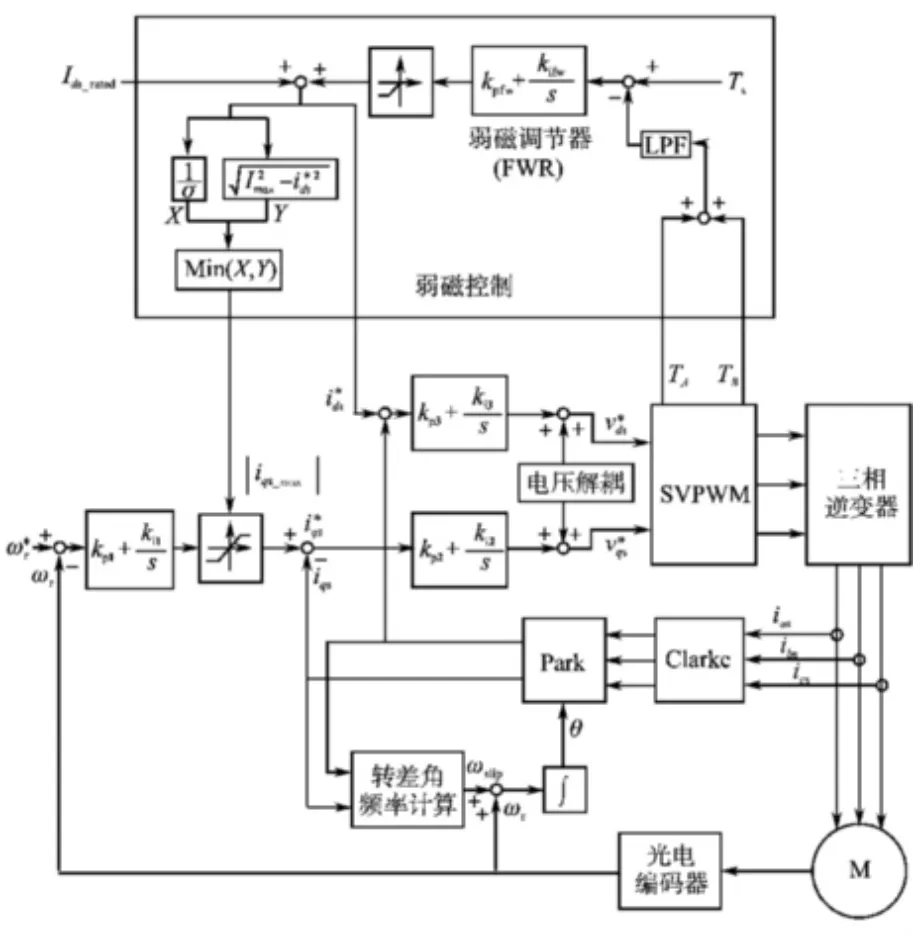
图2 引入电压轨迹弱磁控制的异步电机矢量控制系统结构框图Fig.2 Vector control system of induction motor with the voltage trajectory field-weakening control method
给定转矩电流iq*的限幅值按图3控制流程图确定。 在恒转矩区,电流限幅值按式(4)计算得到。在弱磁区内,由式(4)或式(5)确定。当iqs_Limit1≥iqs_Limit2时,电动机运行于弱磁Ⅱ区,反之则运行于弱磁Ⅰ区。
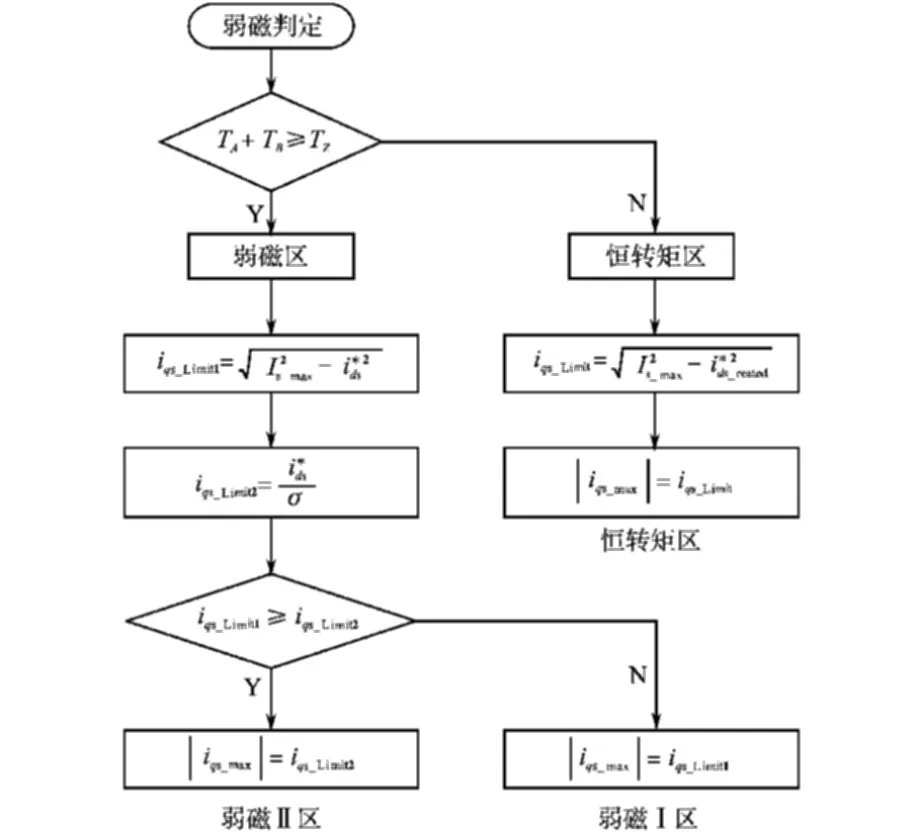
图3 转矩电流限幅值的控制流程图Fig.3 Flow chart for the limitation of torqueproducing current control
4 仿真与实验结果
4.1 仿真结果
在Matlab/Simulink 环境下搭建控制系统仿真模型。 采用两对极鼠笼式异步电机,相关参数为PN=30 kW,UN=380 V,IN=57 A,fN=50 Hz,nN=1 500 r/min,Lm=30 mH,Lr=0.87 mH,Ls=0.87 mH,Rr=0.165 8 Ω,Rs=0.072 Ω。
分别采用传统弱磁和电压轨迹弱磁两种控制方法驱动电动机带100 N·m 负载,从静止升速到2 500 r/min。 其仿真结果如图4所示。

图4 电压轨迹法与传统方法的仿真对比Fig.4 Comparison of voltage trajectory method and conventional method in simulation
图4中幅值为标幺值,基准值均采用各物理量的额定值。
仿真结果表明,在同样负载下,电压轨迹法与传统方法相比,电机转速跟踪更快,启动过程转矩电流更平稳,励磁电流更小。 控制器输出调制电压可达六边形轨迹。
4.2 实验条件
设计基于TMS320F28335 的异步电机驱动控制器,应用于30 kW 电动汽车用驱动电机实验台架。 系统的动力为600 V 蓄电池组,逆变主电路为电压型3 桥臂2 电平拓扑结构,电机参数与仿真相同,实验波形由控制器的RS232 接口传输至LabView 设计的虚拟示波器界面上。
针对TMS320F28335 型微处理器,设计采用ePWM1 定时器中断作为主控制程序,以C 语言编写代码,实现本文设计的含电压轨迹弱磁控制的异步电机矢量控制策略。
4.3 实验结果
控制电机带100 N·m 负载从静止启动至转速为2 500 r/min,记录电流波形。
图5和图6所示分别为采用传统弱磁与本文提出的电压轨迹弱磁控制电机运行于2 500 r/min 时的电流波形。 可以看出,采用电压轨迹法,电机励磁电流波动小,获得转矩电流更加平稳,电机定子电流畸变减小。
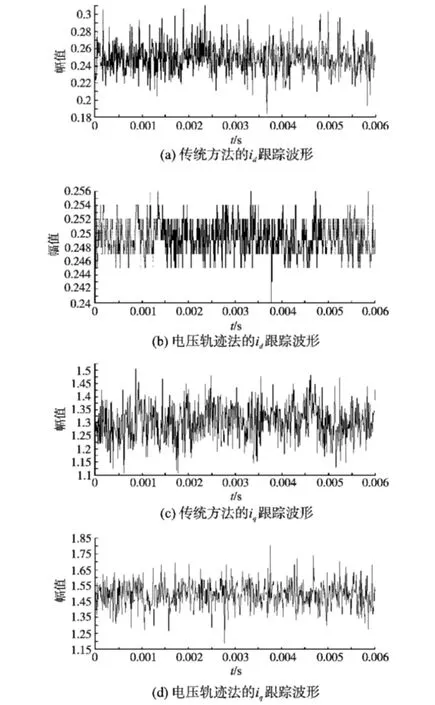
图5 电流分量id与iq波形Fig.5 Waveforms of d-axis current and q-axis current
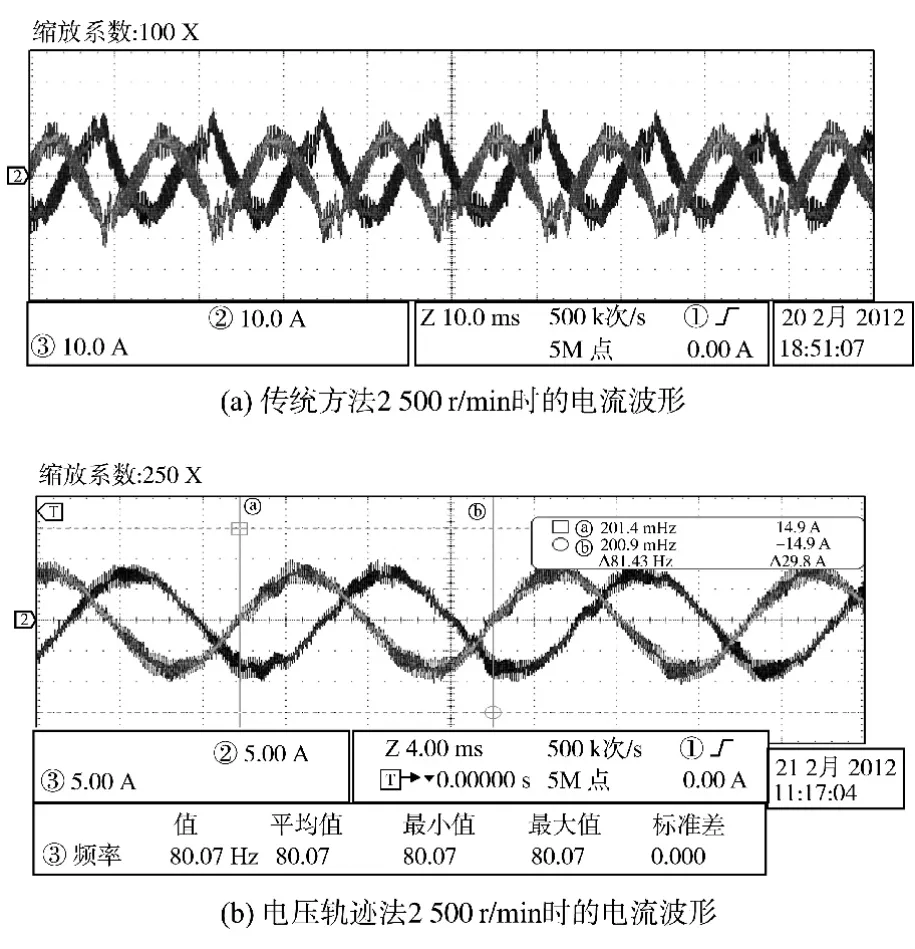
图6 稳定后的定子电流波形Fig.6 Waveforms of stabled stator current
5 结论
本文提出的通过空间矢量调制的电压轨迹弱磁控制方法,与电机参数无关,保证系统鲁棒性,能够有效控制异步电机高速运行,提供大转矩,满足电动汽车加减速快,动态性能好等要求。
[1] 樊扬,瞿文龙,陆海峰,等.一种考虑负载转矩的异步电机弱磁控制策略[J].清华大学学报,2009,49(4):473-476.
[2] 张恒,文小琴,游林儒.一种改进的异步电机弱磁控制方法[J].电气传动,2010,40(12):17-20.
[3] 龙波,曹秉刚,胡庆华.等.电动汽车用感应电机弱磁区电磁转矩最大化控制[J].西安交通大学学报,2009,43(4):62-100.
[4] Gallegos-Lopez G,Gunawan F S,Walters J E.Current Control of Induction Machines in the Field- weakened Region [J].IEEE Transactions on Industry Applications,2007,43(3):981-989.
[5] 万山明,陈骁.感应电动机转子磁场定向下的弱磁控制算法[J].中国电机工程学报,2011,31(30):93-99.
[6] 王彬杰.感应电机弱磁控制技术研究[D].武汉:华中科技大学,2007.
[7] Lin Ping-yi,Lai Yen-Shin.Novel Voltage Trajectory Control for Field-weakening Operation of Induction Motor Drives[J].IEEE Transactions on Industry Applications,2011,47(1):122-127.
[8] 刘军锋,李叶松.感应电机在弱磁区的电流解耦控制研究[J].电气传动,2008,38(8):24-27.
猜你喜欢
大电机技术(2022年3期)2022-08-06
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
河北电力技术(2021年2期)2021-07-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
电子制作(2018年1期)2018-04-04
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年23期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
