
高速导航载体干扰磁场补偿方法研究*
2013-05-14 06:39:46潘孟春罗飞路庞新良
计量技术 2013年9期
李 季 潘孟春 罗飞路 庞新良
(1.国防科技大学机电工程与自动化学院,长沙 410073;2.防化研究院,北京 102205)
0 引言
地磁导航技术以其无源、隐蔽性好等优点而成为当前导航领域研究的热点,而获得导航区域内地磁场的精确测量值是进行地磁匹配的前提,也是决定导航精度的关键因素[1-2]。导航载体上的磁场环境复杂,载体上的各种铁磁性物质、电子设备等的磁场都会叠加在地磁场上,对磁力仪产生干扰,导致其输出产生误差。因此,载体干扰磁场的补偿是地磁导航技术应用中必须解决的关键问题之一。
目前对于载体磁场的研究主要是针对固定磁场与感应磁场[3-4],而对于高速运行的载体,涡流磁场的影响也不能忽略。全面考虑载体干扰磁场的补偿方法主要是基于Tolles-Lawson方程[5-8],它利用一个高精度总场磁力仪测量地磁场的值和一个三分量磁力仪测量载体的方向余弦,将地磁场测量值的三分量都投影到地磁场方向上,通过一组测量值来得到载体磁场。由于忽略了地磁场真实方向与测量方向之间的误差,因此,该方法只在干扰场较小的情况下适用。
本文在研究高速航行导航载体干扰磁场特性的基础上,提出利用矢量磁力仪测量值以及地磁场真实总场值进行干扰磁场补偿,推导得到了估计载体干扰场系数的数学模型,利用最小二乘法对模型的参数进行估计,进而对测量值进行补偿。最后通过仿真对该方法的有效性及补偿效果进行了验证。
1 高速航行载体磁场特性分析
在导航载体中,能够产生干扰磁场的干扰源有很多,这些干扰场按照其来源来说可以分为固定磁场、感应磁场、涡流磁场和随机磁场等[5]。
固定磁场主要是由载体上铁磁性物质的剩磁所产生,它在短时间内不随时间的变化而变化。在载体坐标系下,固定磁场可以看成是一个常量,用Hp来表示:
(1)
其中Hpx、Hpy、Hpz分别表示固定磁场在载体坐标系三个坐标轴上的投影。
感应磁场主要是载体上的软磁性材料在地磁场中被磁化而产生的,其大小与引起它的外加磁场成正比。在载体坐标系下,感应磁场Hi可以表示为:
(2)

载体在地磁场中运动时,其上大的金属片或金属壳切割磁力线会产生涡流,由此所产生的磁场就是涡流磁场。涡流磁场的大小及方向与地磁场梯度以及载体运动时加速度的大小等有关。在载体坐标系下,该分量可以表示为:
(3)

除了上述干扰磁场之外,载体上还存在一些随机干扰磁场,如电子设备在工作时产生的磁场、供电导线中的电流突然变化时产生的干扰等。随机磁场主要为一些高频成分,而地球磁场的变化极其缓慢,通常认为其频率在1Hz以内,因此,随机磁场可以通过对测量数据进行滤波、对干扰源进行屏蔽等方法加以消除。
所以在地磁导航中,矢量磁力仪的输出值Hm可以表示为:
Hm=Ho+Hp+Hi+He
(4)
写成向量的形式:
(5)
2 载体干扰磁场补偿方法
假设载体的姿态角为a、β、g,则
(6)
将式(4)变换一下,可以得到:
(7)
上式可以写成:
(8)
其中
为由载体干扰磁场系数组成的矩阵;
为由载体的姿态及其变化率所组成的向量。
式(8)两边同时取向量的模可得:
(9)
从而可求出
(10)
上式为关于载体磁场系数以及磁力仪测量值的一个方程。若是已知地磁场的真实总场值以及含有载体干扰的测量值,则利用迭代最小二乘的方法不难估计出载体磁场参数。所以,载体干扰磁场补偿的过程为:首先选定一块磁场环境平静的区域,测出该区域内地磁场的真实总场值,然后,令载体进行一系列变化姿态的校正机动航行,测出一组包含载体干扰磁场信息的测量值,并利用惯导系统测量出载体的姿态,估计出载体干扰磁场参数,最后,再利用式(10)对测量值进行补偿,消除载体磁场的影响,得到真实的地磁场值。
3 补偿方法特性仿真研究
为了验证上述方法的补偿效果,这里采用仿真对其进行研究。
在仿真中,假定载体在一块磁场梯度均匀的区域进行机动,该区域的地磁场总场强度为30000nT,固定磁场、感应磁场和涡流磁场系数分别设定为:


传感器的噪声为均值为零、方差为2nT的高斯白噪声。由仿真生成的矢量磁力仪的测量值如图1所示。
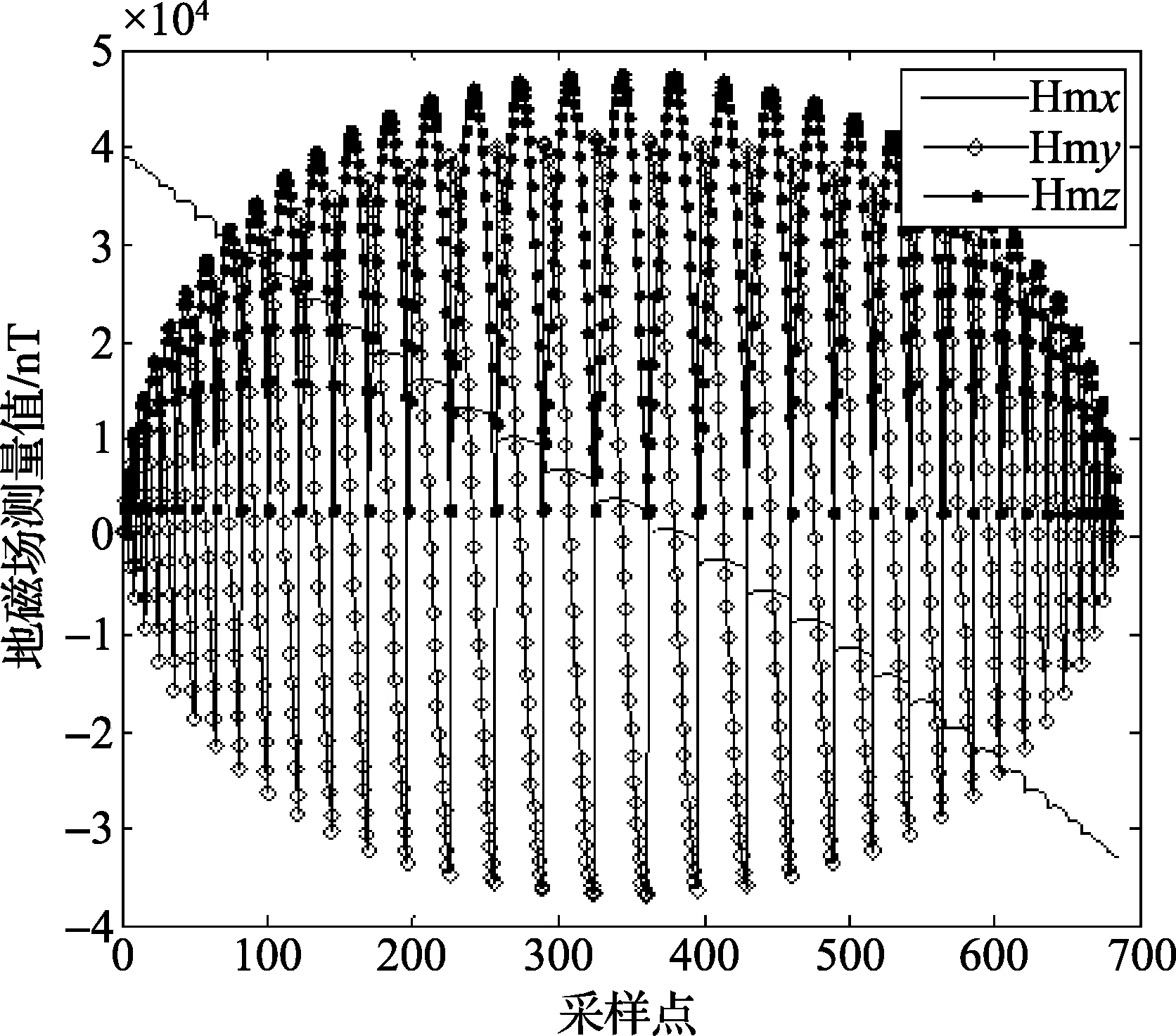
图1 地磁场矢量测量值
根据前面提出的方法,对载体磁场参数进行估计,可得载体固定磁场、感应磁场以及涡流磁场系数矩阵分别为:


从参数估计的结果可以看出来,利用迭代最小二乘的方法可以较准确地估计出载体磁场参数值。根据估计出来的参数对测量数据进行补偿,可得补偿前后的地磁场总场值如图2所示,补偿后的误差如图3所示。

图2 补偿前后的地磁场测量值(总场)

图3 补偿后的误差
从图2可以看出,补偿前由于载体磁场的干扰,地磁场的测量值严重偏离真实值,载体干扰磁场的总量约为15000nT。而经过补偿后的总场值已经很接近真实值,从图3可以看出,补偿后测量值的误差在6nT以内,且误差为正态分布。因此,仿真的结果表明,当载体干扰磁场中的涡流磁场的影响不能忽略时,本文中提出的方法可以对包含涡流磁场在内的载体磁场较好地进行补偿。
4 结论
本文针对高速航行载体磁场干扰补偿的问题,提出利用矢量磁力仪的测量值对地磁场总场进行补偿的方法。仿真结果表明,本文提出的方法对于载体上固定磁场、感应磁场以及涡流磁场的补偿效果明显,而且方法简单,易于实现。
[1] 周军,葛致磊,等.地磁导航发展与关键技术[J].宇航学报,2008,29(5)
[2] Goldenberg F.Geomagnetic Navigation Beyond the Magnetic Compass [J].Proceedings of the International Symposium on Position,Location and Navigation,2006 :684-694
[3] 张晓明,赵剡.基于椭圆约束的新型载体磁场标定及补偿技术[J].仪器仪表学报,2009,30(11)
[4] GEBRE-EGZIABHER D,ELKAIM G H,POWELL J D,et al.Calibration of Strapdown Magnetometers in the Magnetic Field Domain[J].Journal of Aerospace Engineer,2006(19):87-102
[5] S.H.BICKEL.Small Signal Compensation of Magnetic Fields Resulting from Aircraft Maneuvers,IEEE Transactions on Aerospace and Electronics Systems,Vol.Aes-15,No.4,July 1979
[6] T OLLES W E,LAWSON J D.Magnetic Compensation of MAD Equipped Aircraft [R].New York:Airborne Instruments Lab.Inc.,1950
[7] Peter M Williams.Aeromagnetic compensation using neural networks [J].Neural Comput & Applic,1993,1:207-214
[8] 庞学亮,林春生,张宁.飞机磁场模型系数的截断奇异值解法估计[J].探测与控制学报,2009,31(5)
猜你喜欢
地震地磁观测与研究(2023年3期)2023-10-19 08:23:36
河南科技(2022年22期)2022-12-26 00:12:19
装备制造技术(2020年11期)2021-01-26 00:39:12
中国棉花加工(2020年3期)2020-01-15 08:51:56
通信电源技术(2018年5期)2018-08-23 01:16:00
系统工程与电子技术(2016年11期)2016-11-11 07:20:37
地质装备(2016年1期)2016-03-10 09:05:28
中国棉花加工(2016年2期)2016-02-04 20:01:25
汽车科技(2014年6期)2014-03-11 17:46:08
组合机床与自动化加工技术(2014年10期)2014-03-01 02:22:09
