多功能轮椅机器人的结构设计及其性能分析*
2013-04-16 07:40袁磊
机械制造 2013年3期
□袁磊
南昌航空大学 航空制造工程学院 南昌 330063
随着人们生活水平的提高,人类的寿命在逐渐延长,伴随而来的是人口老年化问题越来越成为社会关注的焦点;同时随着工业化进度越来越快,汽车的数量也在逐年增加,因交通事故导致瘫痪和肢体残疾的人也越来越多[1][2],这些人群都离不开轮椅的帮助。 普通的轮椅由于智能化程度较低、功能单一,已经不能满足这类人群的需要,迫切需要运用现代高新技术的轮椅机器人来改善他们的生活质量和生活自由度[3][4]。
笔者在分析用户需求的基础上,设计了一种基于轮式移动小车底盘的可升降多功能的轮椅机器人[5],并进行结构建模和性能分析,得出可行性方案。
1 总体结构设计
1.1 功能设计
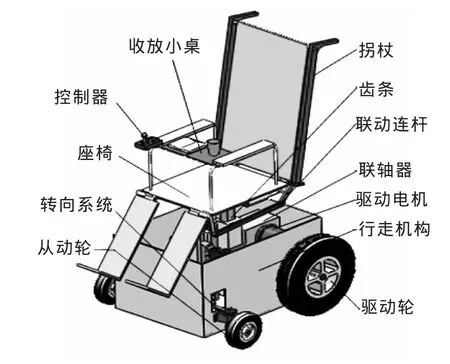
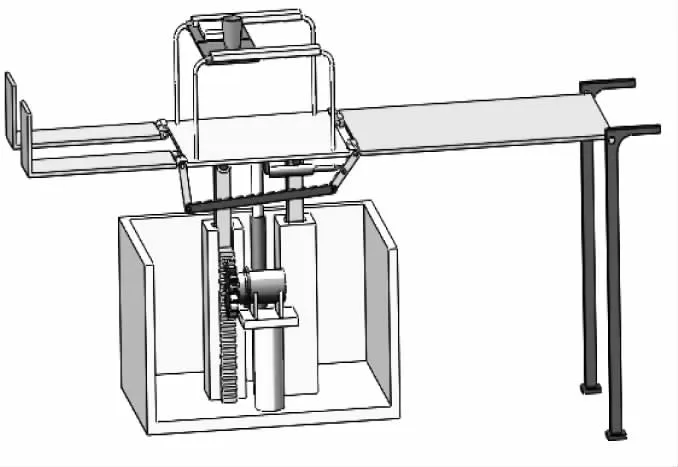
▲图1 机器人车体结构图
本轮椅机器人的主要功能包括:独立后轮驱动控制,全方位转动;轮椅升降可上下调节,纵向可摆动任意角度,直到水平姿态,下肢可联动摆动;轮椅上附有折叠小桌和拐杖机构,满足不同人群的使用需求[6]。
1.2 轮椅总体结构
本轮椅机器人主要分为上下两部分,下部底盘是一个携带超声波传感器的四轮小车,上部是一个多功能座椅,两者之间靠一个带自锁功能的可伸缩气弹簧支撑,座椅的升降靠2个电机带动齿轮齿条传动完成,图1给出了轮椅机器人的结构简图,轮椅机器人的主要尺寸数据如表1。

表1 轮椅机器人的主要尺寸数据/mm
2 轮椅各部分的工作原理
2.1 上下升降机构
升降机构主要靠一对齿轮和齿条的啮合来实现,齿条焊接在一个带有T型槽的导轨上,导轨与小车底盘相连。齿轮与电机轴相连,齿条与T型槽组成移动副,实现座椅的升降。升降机构在上升过程中,按下控制器上升按钮,电源接通,电机转动,经齿轮齿条副传动,齿轮带动气弹簧伸长并自锁,座椅上升,上升后的状态如图2(b);下降过程,按下控制器下降开关,气弹簧泄压,在重力和气弹簧缓冲作用下,座椅缓慢下降至初始位置,如图2(a)所示。
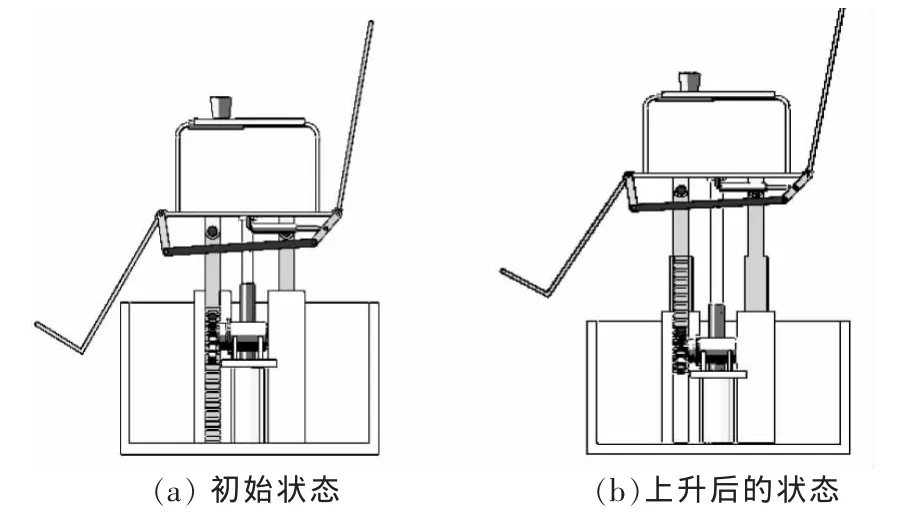
▲图2 升降过程示意图
2.2 平躺机构
平躺机构的驱动是采用自锁型的气弹簧提供动力,靠背在气弹簧的作用下可以从水平姿态恢复到正常姿态,利用气弹簧的自锁性使靠背在平放过程中的任意角度都可以停住。连杆机构的主要作用是使靠背和靠脚实现联动,即在靠背放平的同时,靠脚也能上升,直至靠背、座椅、靠脚处于同一平面,其结构模型如图3所示。
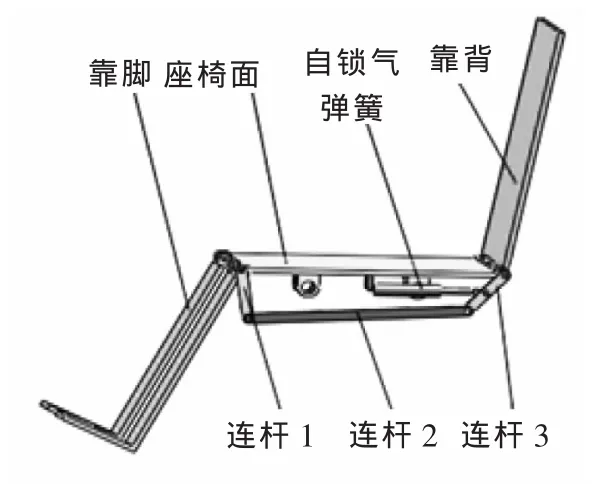
▲图3 平躺机构结构模型
平躺机构的摆角机构采用一组双摇杆机构,连杆1和靠脚固定在一起,连杆3与靠背固定在一起。当需要平躺时,打开气弹簧开关,人体后仰,靠背就向后运动,靠重力压缩气弹簧,带动连杆3绕关节旋转,通过双摇杆机构中的连杆2和连杆1,带动靠脚向上摆动,直至水平姿态。当需要恢复座椅状态时,只要人体坐起,打开气弹簧开关,气弹簧自动伸长从而恢复到初始状态。
2.3 行走机构
考虑到本轮椅机器人的工作环境主要是室内和路况较好的室外环境,因此本轮椅的底部小车采用四轮式结构。这种结构优点在于动作平稳、移动速度可调、结构简单和控制操纵方便等,图4为笔者所设计的行走机构。
行走机构除了能实现直行、后退、转向和避障之外,同时也是整个轮椅机器人的核心支架,升降机构控制驱动系统都装在这个支架上。
2.4 辅助机构
本轮椅机器人针对经常阅读和写作的用户设计了可收放的小桌,主要由两块活动塑料板构成,如图5(a)、(b)所示。

▲图4 行走机构

▲图5 收放小桌
▲图6 多功能拐杖用途
▲图7 小车转向模型
考虑到老年人和伤残人士的使用需要,设计了两根多功能拐杖,与轮椅靠背整合在一起,既可当轮椅平躺时的支撑,又可以取出当拐杖使用,如图6所示。
3 轮椅转向和升降性能分析
3.1 转向性能分析
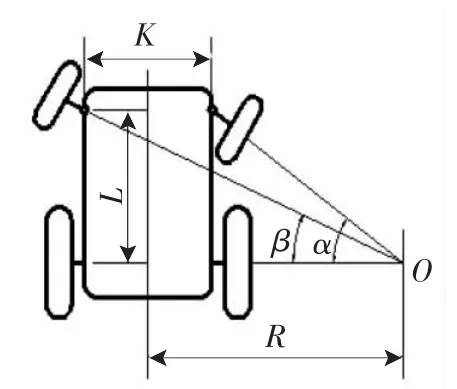
本轮椅的转向是靠转向电机、双梯转向传动机构、齿轮齿条转向器和行星齿轮差速器共同完成的,轮椅的转向动力学模型如图7所示。
根据阿克曼定理[7]中车辆转向时各车轮纯滚动的要求,对于后轮驱动的4×2轮式轮椅,转向时必须满足以下3个条件。
(1)通过前轮偏转实现转向,车轮偏转的程度决定了轮椅转弯半径的大小。
(2)两前轮作纯滚动,要求内侧前轮偏转角α比外侧前轮偏转角β要大,内、外侧前轮偏转角α和β的关系为:

式中:K为两转向节立轴与前轮轴心线交点之间距离,K为500 mm;L为车辆前后轴距,L为450mm。
(3)转向时,两个驱动轮在同一时间内走过的路程是不相等的,外侧驱动轮转得要快,而内侧驱动轮转得慢,即:

式中:n1、n2分别为慢、快速侧驱动轮转速;R为转弯半径;B为后轴轮距。

▲图8 双梯形转向传动机构结构图
本轮椅选用的双梯形转向机构[8],结构如图8所示,其中横拉杆AD=BC的长l2=90 mm;梯形臂O1A=OB的长l3=150 mm;E为齿条滑块,主销后倾角φ=2.5°。
本轮椅选定的转向器是齿轮齿条转向器,其齿条两端球铰中心距M=250 mm,齿条轴线到梯形底边的安全距离h=50 mm。则梯形底角与K、M以及l2、l3的关系为:

当轮椅需要转向时,只要使转向电机正转或反转,则经过齿轮齿条转向器后,齿条便会向左或向右移动一个距离s,如图9所示。以右转弯为例,齿条向右移动一段行程s后,通过左横连杆拉动左梯形臂,使之转过β角,同时右横连杆向右推动右梯形臂,使之转过α角。
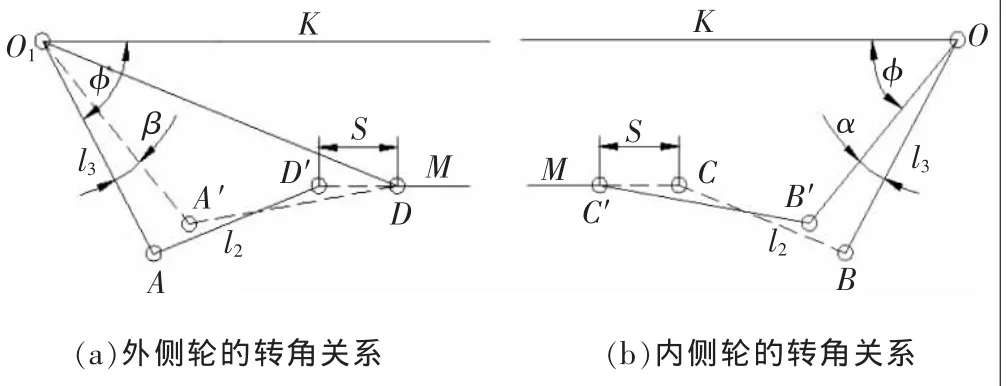
▲图9 双梯形传动机构的几何关系
取梯形的右角定点O为坐标原点,可得出齿条行程s与内侧轮转角α的关系:

由式(1)得本轮椅机器人的转向阿克曼角A为:

所以本轮椅机器人能有效转向且不会发生漂移。由于本轮椅采用的是后两轮独立驱动,所以内外侧驱动轮的转速能够满足式(2)。加上本轮椅的速度要求不高,因此可以不用考虑由于加速度过大造成的转向时侧翻的问题。说明轮椅机器人的行走机构能满足阿克曼转向定理的3个条件。
3.2 升降性能分析
在SolidWorks三维软件下建立齿轮齿条传动三维模型,在转换成.X_T格式导入Admas下进行座椅升降动力学仿真。齿轮齿条的模数是2 mm,齿轮的齿数是38,齿条长500 mm。如图10所示,赋予材料属性,建立好各项运动副后,给出初始约束。
座椅的质量G1取98 N,人体的质量G2取980 N,则齿条承受座椅和人体给予的向下压力为:

▲图10 Admas环境下各约束的建立

齿条的线速度v=100 mm/s,齿轮的节圆直径d=84 mm,则升降电机的转速为:

又升降电机功率P≈2 kW,所以齿轮受到的扭矩T为:

将计算结果输入到模型中进行动力学仿真,可得到图11、图12、图13所示的运动曲线。

▲图11 齿轮的角位移随时间变化图
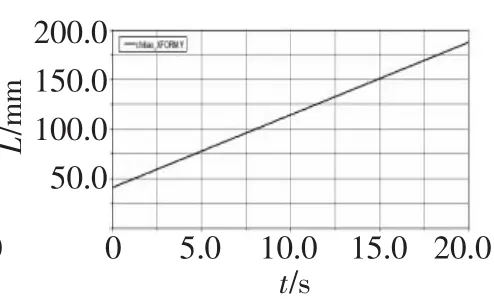
▲图12 齿条质心线位移随时间变化图

▲图13 齿轮副受力在XY轴的投影(其中实线是X轴上的投影)
根据图 11、图 12的运动曲线,可以认为电机功率、齿轮齿条副、运动参数的选择和结构布置都能够实现100 kg人体的升降。根据图13的受力曲线,可得到所选碳钢材料的齿轮齿条,以及焊接模型强度都能够满足。也可以认为该升降结构方案理论上亦是可行的。
4 结论
本文设计了一种多功能可升降的轮椅机器人,根据各组成机构的工作原理进行结构设计,包括独立后两轮驱动的行走机构、齿轮齿条传动的升降机构、联动的平躺机构、以及提供书写小桌和支撑拐杖功能的辅助机构。着重分析了其转向和升降性能,为轮椅机器人的设计的后续研究制作奠定了基础。
[1] 鲁涛,原魁.智能轮椅研究现状和发展趋势[J].机器人技术及应用,2008(2):1-5.
[2] 姚玉峰,孙立宁,杜之江,等.智能轮椅的研究与发展[J].中国康复医学杂志,2007,22(6):540-542.
[3] 何清华,黄素平.智能轮椅的研究现状和发展趋势[J].机器人技术及应用,2003(2):12-16.
[4] 廖晓辉,沈大中.智能轮椅的研究现状与关键技术分析[J].制造业自动化,2008(4):1-6.
[5] 全国 3D大赛优秀作品---多功能轮椅[EB/OL].http://wenku.baidu.com/view/42e3633e5727a5e9856a61b5.html.
[6] Gregory Dudek,Michael Jenkin.Computational Principles of Mobile Robotics[M].Cambridge:Cambridge University Press,2000.
[7] 姜明国,陆波.阿克曼原理与矩形化转向梯形设计[J].汽车技术,1994(5):17-19.
[8] 张敏中.齿轮齿条式转向器双梯形转向机构的优化设计[J].江苏理工大学学报,1994(2):1-7.
猜你喜欢
特区文学·诗(2021年6期)2021-12-22
农业装备与车辆工程(2021年8期)2021-08-28
工程技术与管理(2021年13期)2021-08-23
科学与信息化(2021年20期)2021-08-05
南方农机(2021年1期)2021-01-20
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
中国生殖健康(2019年8期)2019-01-07
凿岩机械气动工具(2017年3期)2017-11-22
青春(2017年5期)2017-05-22