基于FLUENT的仿蝴蝶翼型二维流场分析
2013-04-16 07:40雷亚超余承斌
机械制造 2013年3期
□ 雷亚超 □ 许 瑛 □ 余承斌
1.南昌航空大学 航空制造工程学院 南昌 330063
2.南昌航空大学 飞行器工程学院 南昌 330063
在一些震后灾区、有毒气体泄漏等极端环境下,以人力去进行搜救或勘察地形存在着种种困难,在这种情况下,无人飞行器则是一个很好的选择,它可以不受地形的影响[1]。然而大部分固定翼飞行器或直升机等的飞行方式存在缺陷,而重量轻、能够自行转换前进方向、利用双翅扑动只需很少能量就能完成任务的飞行器则有很多优点。昆虫就是自然界中优秀的飞行者,它们利用非定常效应产生大升力[2]。
本文根据凤蝶双翅的扑动产生翼端漩涡与空气相互作用,利用高频摄像机进行凤蝶自由飞行的运动分析,并结合实际情况利用流体力学软件FLUENT,对模型翼进行流场分析及数值计算,完成了其数值模拟,同时得到了相应的升、阻力系数,验证了该计算机实验的可行性。
1 凤蝶的尺寸参数及其在高速摄像机下的运动分析
1.1 凤蝶的尺寸参数
对凤蝶进行三维形状测量,利用测量工具测得凤蝶大致的尺寸参数,如表1所示。
1.2 高频摄像机下蝴蝶的运动分析
在高频摄像机下可以观察并计算得到蝴蝶在自由飞行时,双翅的扑动频率较低约为10 Hz,拍动角度较大(上拍约60°,下拍约-30°),由腹部的振动来实现对攻角的控制(振动角为-15~20°)。蝴蝶前、后翅在飞行中一般都是重叠在一起的,很少分开。因其翅在拍动过程中没有明显的翻转,故扑翼自由度为1。

表1 蝴蝶尺寸参数
蝴蝶在飞行时翅翼的运动可分为两个分运动的合成,即沿X轴负方向的平动(平动速度为v)和绕X轴的上下扑动 (扑动范围为-30~60°)。 腹部的运动为沿Y轴的往复转动 (转动范围为-15~20°)。 双翅拍动和腹部振动示意图如图1所示。φ为双翅拍动角,β为腹部振动角。
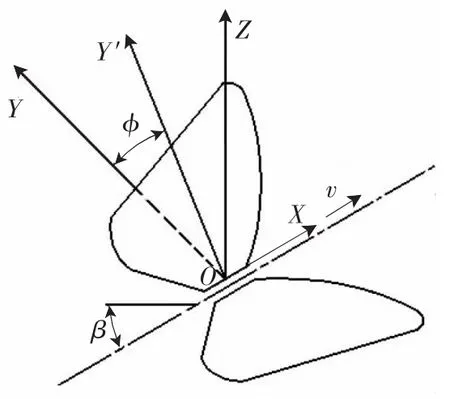
▲图1 蝴蝶运动示意图
2 翼型的流场数值计算
2.1 翼型建模
用FLUENT前处理软件GAMBIT建立翅翼翼型的二维模型。因蝴蝶的翅翼比较薄,本文选用的是一种典型的对称翼型NACA0006翼型,在30.0%处其厚度为6.0%。翅翼流场的建模与网格划分如图2所示,对翼型周围流场网格进行加密处理[3]。
在GAMBIT中设定边界条件如下:入口处为速度入口边界条件(Velocity Inlet),出口处为压力出口边界条件(Outflow),翼型轮廓为无滑移壁面条件(Wall),流体域流体性质为FLUID,来流速度为1 m/s。
2.2 翼型的流场计算
由于翅翼模型运动速度较小,在运动过程中无需考虑产生的热量,故采用segregated分离式求解器。求解方式采用 unsteady 非定常[3],implicit隐式求解。湍流模型选择标准k-ε模型。
蝴蝶在飞行时运用腹部的振动来控制攻角,对翼型在-15~20°攻角范围下进行数值模拟,取来流速度1 m/s,翼型在不同攻角下的升、阻力系数如图3所示。
由图3可知,随着攻角的增加,平均升力系数cl增大,当攻角增大到大约15°左右时,平均升力系数增加的幅度开始减小;当攻角小于0°时,平均阻力系数cd减小得比较缓慢;当攻角大于0°时,随着攻角的增大,平均阻力系数也随之增大。
不同攻角下翼型绕流均等速度线分布如图4所示。由图4可以看出,随着攻角的增大,翼型后缘逐渐出现了后缘漩涡,当攻角为20°时有轻微的翼面分离了;当攻角大于0°时翼型下表面的流速小于上表面的流速,从而下表面的压强大于上表面的压强形成了压力差,则产生了正升力;当攻角小于0°时,则产生负升力。
3 翅翼拍打运动中的数值模拟
利用UDF模块的动网格技术,对翅翼的上下拍动过程进行数值分析。翅翼模型沿X轴平动,绕X轴转动。翅翼的上下拍动为正弦运动,运动方程为:

式中:t为时间;φ(t)为随时间的拍动角;f为拍动频率。
仿蝴蝶翅翼左右对称,在计算过程中选择左翼建模。翅翼模型按照振幅A=0.25π,频率f=10 Hz作上下拍动。上拍最高点为60°,下拍最低点为-30°。在GAMBIT中建模并生成网格,计算域采用10倍翅展长度的正方体,网格采用三角形非结构网格。
对升力系数进行监测,拍动频率为10Hz,时间步长设为0.001s(若时间步长设置过大,则会出现负体积情况,导致计算停止,出现错误),计算200个时间步长得到升力系数的变化曲线,如图5所示。
由升力系数变化曲线可知,翅翼在下拍过程中产生正升力,在上拍过程中产生负升力。
翅翼在下拍过程中与上拍过程中周围的压力等值线图分布及流场速度等值线图分布如图6、图7所示。
由图6(a)可以看出,当翅翼在下拍过程中,翅翼下表面的压力大于翅翼上表面的压力,由这种压力差产生了翅翼的升力,并且有前缘涡和翼端涡产生;由图6(b)可以看出,翅翼上表面的流场速度大于翅翼下表面的流场速度,并且在翅翼上表面有漩涡形成。由图7可以看出,翅翼在上拍过程中产生的流场刚好和下拍相反,有阻力产生提供向前的推力,并且产生的翼端涡弱于下拍过程。

▲图2 GAMBIT建模型及网格划分
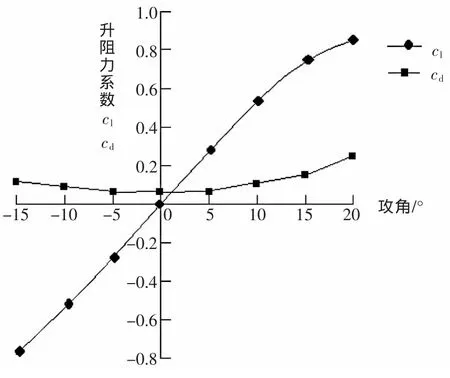
▲图3 升、阻力系数随攻角的变化曲线

▲图4 不同攻角下翼型的等速度线分布

▲图5 升力变化曲线

▲图6 下拍过程图
4 小结
本文通过高频摄像机测得凤蝶的运动参数,利用计算流体力学软件FLUENT对仿蝴蝶翅翼的翼型及翼展的上下扑动进行了二维数值模拟和流场分析,在对翼型的流场分析中得到了相应的升、阻力系数,随着攻角的增大,升力系数和阻力系数都有所增大,但阻力系数增加得较快,且在攻角增加到20°时产生了翼面分离;在翅翼的上下扑动运动中采用了动网格技术,能有效地解决流场的动边界问题,得出升力产生的原因;对于空气动力学方面的设计,FLUENT软件的数值模拟和流场分析是一种比较可靠的实验方法。
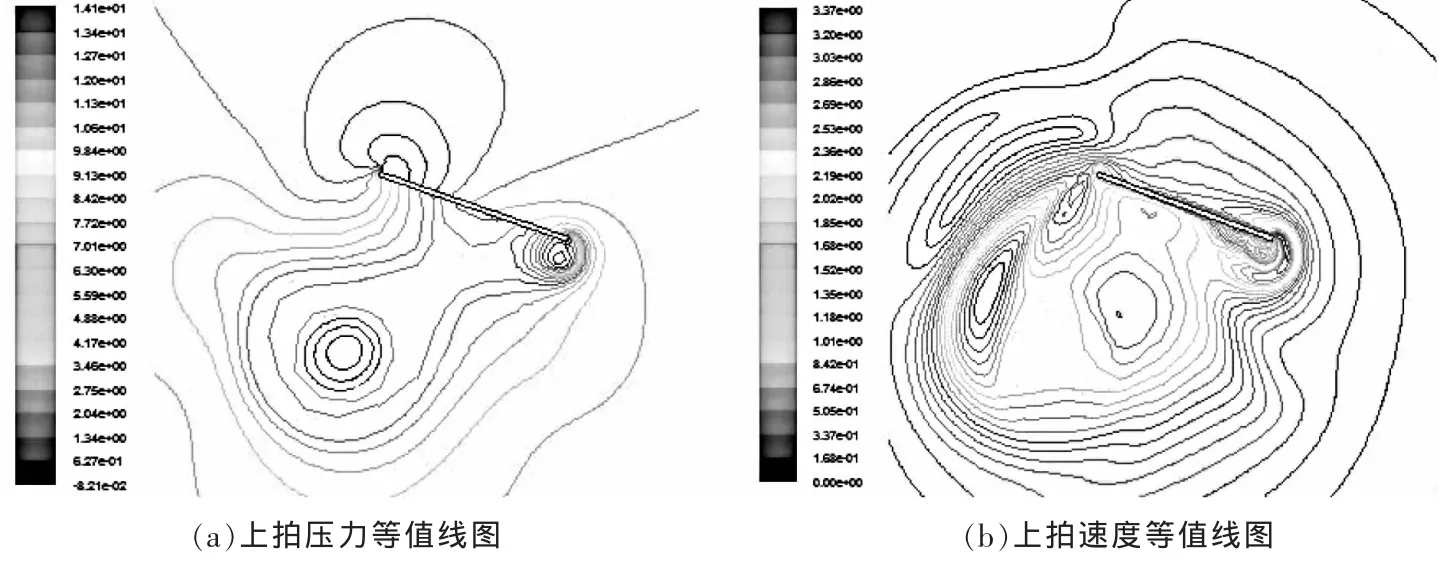
▲图7 上拍过程图
[1] 菊池耕生.小型はばたきロボットの実現を目指して[J].日本流体力学会数値流体力学部門Web会誌,2005,12(3):113-122.
[2] 孙茂.昆虫飞行的高升力机理 [J]. 力 学 进 展 ,2002,32(3):425-434.
[3] 韩占忠,王敬,兰小平.flUENT流体工程仿真计算实例与应用[M].北京:北京理工大学出版社,2005.
[4] 孙茂,黄华.微型飞行器的仿生力学——蝴蝶飞行的气动力特性[J].北京航空航天大学学报,2006,32(10):1146-1151.
猜你喜欢
机床与液压(2022年6期)2022-09-16
小学生必读(低年级版)(2021年4期)2021-07-28
小学生必读(低年级版)(2020年11期)2020-03-03
宇航总体技术(2019年5期)2019-10-11
小学生必读(低年级版)(2019年9期)2019-04-13
兵器装备工程学报(2019年1期)2019-02-25
空气动力学学报(2018年1期)2018-03-09
北京航空航天大学学报(2017年7期)2017-11-24
阅读与作文(小学高年级版)(2016年6期)2016-11-14
振动与冲击(2015年2期)2015-05-16