基于序列图像的车载测速方法与实验
2013-03-07 03:01金守峰胡永彪田明锐张文祥
合肥工业大学学报(自然科学版) 2013年3期
金守峰, 胡永彪, 田明锐, 张文祥
(1.长安大学 道 路施工技术与装备教育部重点实验室,陕西 西 安 710064;2.西安工程大学 机 电工程学院,陕西 西 安 710048)
0 引 言
车辆行驶速度对于安全行驶及车辆牵引性能是非常重要的,目前车辆的速度一般是通过测量驱动轮车轴的转速及车轮行驶半径换算得到的行驶速度,该速度在车轮与地面纯滚动时可以认为与实际行驶速度相同,但当出现滑转时所显示的速度就不是实际行驶速度[1-2]。对实际行驶速度的测量通常使用五轮仪装置,但仅限于试验研究[3]。雷达测速范围大约在24~99km/h,不适合低速测量;GPS测速精度高但受电离层的天气状况影响及附近建筑物和地面反射造成的延迟较大[4];视频测速利用视频图像对车辆进行测速,较多应用在公路车辆速度监控中[5]。
本文在分析路面灰度分布随机性特点的基础上,通过车载图像采集系统实时采集路面纹理的灰度序列图像,利用相邻图像的相似性估计出相邻图像间的位移量,结合图像采集系统的标定参数及成像帧频,计算车辆相对于路面的运动速度。
1 车载图像采集系统的运动模型
图像采集系统将三维空间中的物体映射到二维空间中,随着图像采集系统的运动,物体上的同一点,在成像平面上的位置也会随之变化,图像采集系统的运动模型如图1所示。
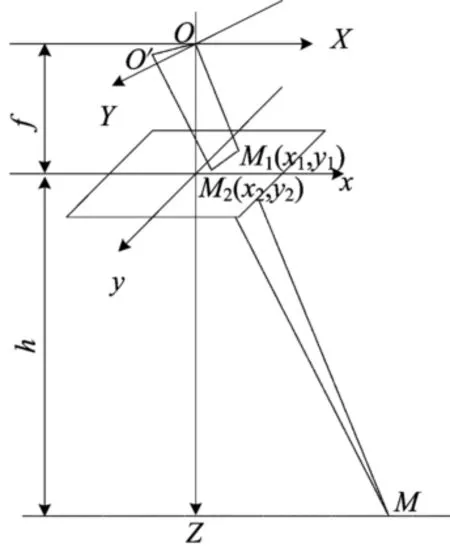
图1 图像采集系统的运动模型
在图1中,O点为载体t1时刻的位置,O′点为载体t2时刻的位置,三维空间点M在t1和t2时刻映射到图像平面上的位置为M1(x1,y1)和M2(x2,y2),(Δx,Δy)是M点在图像平面上在t1和t2时刻的位移量,其中Δx=x1-x2,Δy=y1-y2,假设图像采集系统仅存在平移运动且在景深方向无明显运动,因此,图像采集系统的运动模型如(1)式所示,即

其中,(x1,y1)和(x2,y2)分别表示前后2帧图像相应点的坐标,Δx和Δy分别表示x轴和y轴的平移量,由相邻帧图像的相似性估计出帧间图像位移,则载体的运动速度为:

其中,K为单位像素的距离;Δl为帧间图像位移;N为相机的帧频。
2 图像位移估计算法
图像采集系统所采集的路面有沥青、水泥、泥土等各种路面,在光照条件下路面各处对光反射强度均不相同,在成像平面上形成了随机分布的灰度纹理[6]。利用相邻帧图像的相似性,本文提出图像灰度投影算法估计相邻帧图像的位移量。
将动态图像序列中每一帧图像的二维灰度信息映射成2个独立的一维曲线,分别表示图像行和列的投影[7-8],投影公式为:

其中,Ik(i,j)为第k帧图像上(i,j)位置处的灰度值;Xk为行投影;Yk为列投影;W、H为图像的行数和列数;1/H和1/W为消除孤立噪声带来的影响。
车载图像采集系统采集的第48帧和第49帧的路面灰度图像如图2所示,大小为640像素×512像素,用(3)式对2帧图像进行投影,其投影曲线如图3所示。
由图2和图3可知,相邻2帧图像相似,其投影在X轴和Y轴的投影曲线也相似,将相邻帧的行、列投影一维曲线进行相关计算[9-11],设Rxk和Ryk分别为行投影Xk与列投影Yk的相关性测度,其计算公式为:

其中,Δx和Δy为行列图像位移。

图2 路面灰度图像

图3 路面灰度投影曲线
对应一维曲线的相关测度取最大值,即得到相邻帧在x轴和y轴的平移量Δx和Δy的值[12-13],即:

相邻帧行列投影曲线的相关测度曲线如图4所示。

图4 X轴、Y轴投影相关测度曲线
根据相关测度曲线最大值所对应的像素值估计出相邻2帧的行和列方向的图像位移,由图4a可知第49帧相对于第48帧的行方向图像位移Δx=34像素,由图4b可知列方向图像位移Δy=0像素,也就是说相邻帧间只有x方向位移,而无y方向位移,因此相邻帧间图像位移=34像素。
3 实验及数据分析
3.1 实验装置
实验装置采用单片机控制4个独立电机驱动车轮,速度控制在1.5m/s以内。在实验装置上安装FC-IE工业相机,使其光轴垂直于地面,工业相机在640×512分辨率下的帧频为60帧/s,通过静态标定尺标定K=0.074mm/像素。
3.2 实验数据分析
实验环境为平坦的实验室水泥地面,工业相机在景深方向无明显运动;实验装置沿直线运动,因此工业相机不存在绕光轴转动。本文设定的实验距离为2m,实验装置每次完成这段距离所用时间为8s,则平均速度¯v=0.25m/s。根据本文算法,载体瞬时运动速度如图5所示。

图5 载体瞬时速度曲线

由(6)式计算的速度误差为4%,本文方法计算的载体运动速度平均值为0.249 5m/s,误差为0.2%。
4 结束语
计算的载体速度v与平均速度¯v的误差定义为:
本文提出了一种基于序列图像的车载测速方法。利用相邻帧间路面图像的相似性,以灰度投影算法估计出图像帧间位移,结合相机标定参数计算出载体相对于地面的运动速度。经实验验证,本文算法对于纹理随机分布的平坦地面的速度测量具有很高的精度和稳定性。
[1] 姚怀新.工程机械底盘及其液压传动理论[M].北京:人民交通出版社,2002:11-20.
[2] 马鹏宇.冷铣刨机功率自适应控制系统研究[D].西安:长安大学,2008.
[3] 印 祥,卢博友,钟以崇,等.拖拉机滑转率实时测量中的车速测量方法[J].农机化研究,2009(4):237-240.
[4] 张利鹏,祁炳楠,赵栋杰.几种车速测量装置的工作原理与性能比较[J].公路与汽车,2008(3):40-42.
[5] 高 飞,蒋建国,安红新,等.一种快速运动目标检测算法[J].合 肥 工 业 大 学 学 报:自 然 科 学 版,2012,35(2):180-183.
[6] 杨 强,齐美彬,蒋建国.一种用于车辆检测的选择性背景更新方法[J].合肥工业大学学报:自然科学版,2011,34(4):509-514.
[7] 于起峰.基于图像的精密测量与运动测量[M].北京:科学出版社,2002:148-155.
[8] 周 瑛,魏 平.基于FPGA并行处理的实时图像相关速度计[J].光学技术,2006,32(1):108-110.
[9] 李 锐,何辅云,夏玉宝.相关检测原理及其应用[J].合肥工业大学学报:自然科学版,2008,31(4):573-575,579.
[10] Peters W H,Ranson W F.Digital imaging techniques in experimental stress analysis[J].Opt Eng,1982,21(3):427-431.
[11] Tsai R Y.A versatile camera calibration technique for high-accuracy 3Dmachine vision metrology using off-theshelf TV camera and lenses[J].IEEE Journal of Robotics and Automation,1987,3(4):323-334.
[12] Sun Changku,Wei Wei,Zhang Xiaodong,et al.Experimental design for CCD camera parameters calibration[J].Optoelectronic Technology & Information,2005,18(2):43-46.
[13] Yamaguchi I.A laser-speckle strain gauge[J].Journal of Physics E:Scientific Instruments,1981,14 (5):1270-1273.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(军事科学)(2022年2期)2022-05-25
数学物理学报(2021年1期)2021-03-29
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
红领巾·萌芽(2019年8期)2019-08-27
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
中国与非洲(法文版)(2017年10期)2017-11-23
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07