基于dSPACE的横向磁通永磁电机控制
2013-03-03 05:26:22戴茵茵林宇洲
华侨大学学报(自然科学版) 2013年2期
戴茵茵,林宇洲
(1.华侨大学 信息科学与工程学院,福建 厦门361021;2.华中科技大学 电气与电子工程学院,湖北 武汉430074)
横向磁通永磁电机(transverse-flux permanent magnet motor,简称TFPMM)是德国教授 Weh提出的一种新型电机结构形式.该结构理论上克服了传统电机齿槽处在同一截面,几何尺寸相互制约的缺陷,并可同时增大电机电负荷和磁负荷,从根本上提高了电机转矩密度,特别适合低速、大转矩、直接驱动等场合[1-2].目前,国内外对TFPMM的研究主要集中在电机本体结构设计和电磁场分析这两方面,而对驱动控制系统方面的研究相对较少[3].虽然TFPMM驱动控制策略可借鉴传统电机的控制,但作为一种新型电机结构,毕竟有其特殊性.德国dSPACE公司开发了一套基于MATLAB/Simulink的dSPACE实时仿真系统.该仿真系统能将被控对象以实物的形式连接在仿真回路上,允许反复修改控制器模型并进行实时仿真,直至找到理想的控制方案,这为研究驱动TFPMM更加复杂的控制算法提供了基础.本文在MATLAB/Simulink离线仿真基础上,设计了以dSPACE为核心的横向磁通永磁电机控制系统实验平台.
1 MATLAB/Simulink离线仿真
1.1 TFPMM数学模型
TFPMM虽是一种新型结构的电机,但仍属于同步电机范畴[4],工作于无刷直流驱动模式下.因此,其数学模型可仿照无刷直流电机的数学模型建立.与无刷直流电机不同的是,TFPMM三相磁路无耦合,相之间不存在互感.TFPMM电压方程、电磁转矩方程及运动方程分别为

式(1)~(3)中:ua,ub,uc均为定子相电压;ia,ib,ic均为定子相电流;ea,eb,ec均为定子相绕组反电动势;R为相电阻;L为每相绕组的自感;p=d/dt是微分算子;Te为电磁转矩;Ω为转子机械角速度;TL为负载转矩;J为转动惯量.
1.2 TFPMM控制系统仿真模型
TFPMM控制系统采用速度和电流双闭环无刷直流控制方案,在MATLAB/Simulinik软件环境下,应用模块化建模方法构建的TFPMM控制系统仿真模型,如图1所示.图1中的各主要功能模块分别是:TFPMM本体、逆变器脉冲宽度调制驱动信号、霍尔位置信号、速度PI调节、电流滞环调节等.TFPMM本体依据TFPMM数学模型搭建,其参数配置和实验样机参数一致.考虑该模型要实现与dSPACE的连接,此控制系统仿真模型中模拟了霍尔位置传感器的作用.
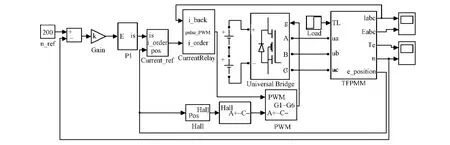
图1 TFPMM双闭环控制系统仿真模型Fig.1 Model of double-closed loop control system of TFPMM
1.3 仿真结果的分析
TFPMM双闭环控制系统仿真波形图,如图2所示.图2(a)中:参考转速n=200 r·min-1;t=0.5 s;额定负载TL=45 N·m.由图2(a)可知:电机起动后很快达到给定转速并稳定下来,且负载变化时,由于双闭环的调节作用,转速基本不受干扰,始终稳定在给定值.图2(b)给出了相反电势与相电流的仿真波形.由图2(b)可知:TFPMM反电势波形接近正弦波,这与对TFPMM样机做发电机实验得出的结果相一致,说明该控制系统仿真模型能够反映实际电机性能.
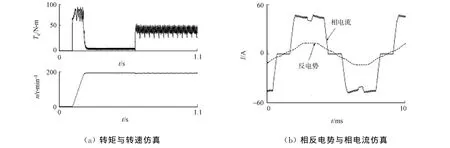
图2 TFPMM双闭环控制系统仿真波形图Fig.2 Simulation waves of TFPMM control system
2 基于dSPACE的实验控制系统
dSPACE系统最大的特点是实现了与MATLAB/Simulink的完全无缝连接,并拥有实时性强,可靠性高,扩充性好等优点.它主要由硬件系统和软件环境两部分组成,其强大的软件环境支持在线模型代码的自动生成、编译、链接,下载,并实现对实际对象的实时驱动控制[5].
2.1 系统硬件构成
TFPMM控制系统实验平台结构框图,如图3所示.平台结构包括了以dSPACE和计算机为基础的控制核心、逆变器电路、信号检测电路、光耦隔离电路和TFPMM实验样机等几部分.其中计算机部分主要用于系统在线模型的设计,实时代码的生成、下载,以及实验仿真的研究.
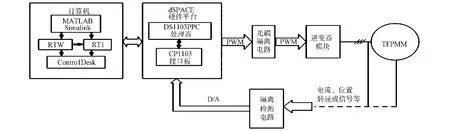
图3 TFPMM控制系统实验平台结构框图Fig.3 Diagram of TFPMM control system for experiment
dSPACE硬件平台采用DS1103PPC作为控制算法处理核心,承担所有的实时计算.逆变器的功率器件采用IGBT(insulated gate bipolar transistor)智能功率模块(IPM),其额定值为60 V,80 A.IPM内部集成了三相逆变桥、驱动电路、制动电路和保护电路.在实际应用中,只要辅以光耦隔离电路,驱动电源,以及各开关管子的PWM控制信号即可.三路霍尔位置传感器提供转子位置,及计算电机的实际转速.两路霍尔电流传感器将检测到的定子相电流通过隔离转换,送入DS1103PPC处理器.经过相应的算法处理后,便可产生使各IGBT管依次开通的PWM脉冲信号,驱动TFPMM的运转.
2.2 系统软件实现
在实际控制系统中,用实物替代图1中的TFPMM、逆变器等模块,引入相应的I/O,D/A转换接口,并对其进行相应配置,便可得到控制系统快速控制原型,如图4所示.图4中:Subsystem模块为MATLAB离线仿真所搭模块的封装;虚线框表示实际电路的接口.
利用 MATLAB中的RTW(real time workshop)与dSPACE系统中的RTI(real time interface),Simulink模型生成dSPACE系统可执行程序代码,并将其下载到硬件中.RTI根据信号参数,产生一个变量文件,借助于测试软件ControlDesk,建立虚拟仪表,对数据进行采集、变量访问、参数在线调试[6].运用Control Desk所建立的虚拟控制实验面板,如图5所示.该控制面板可对仿真参数如PI系数、给定转速值等进行在线修改,还可实时跟踪显示各参量波形.
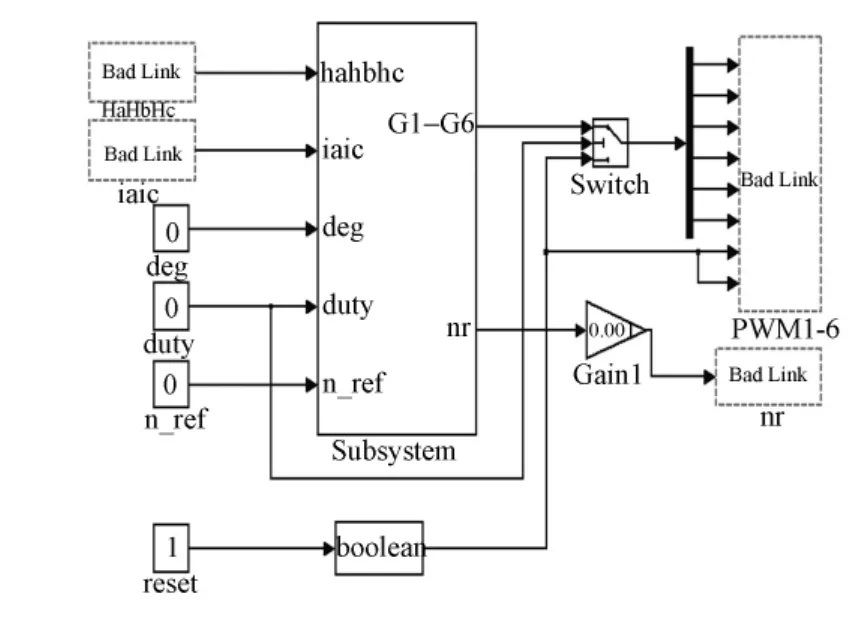
图4 控制系统快速控制原型Fig.4 Rapid control prototype

图5 Controldesk综合控制实验面板Fig.5 Control panel built by Controldesk for experiment
2.3 实验结果分析
实验采用的TFPMM实验样机为三相Y形连接、8对极、外转子轮毂结构.实验中,额定电压为60 V,额定电流为50 A.在给定转速n=200 r·min-1,电机负载转矩TL=35 N·m下,通过Controldesk综合控制实验面板,观测到的电机相电流波形,以及用示波器测量的电机相电流波形,分别如图6,7所示.通过软件计算所得出实际转速为199.392 r·min-1.这与给定转速基本一致,也与用测速工具所测量结果基本一致,说明了本双闭环控制系统能较好地实现电机的稳速性能.对比实验与仿真结果,进一步论证了该控制系统方案的可行性.
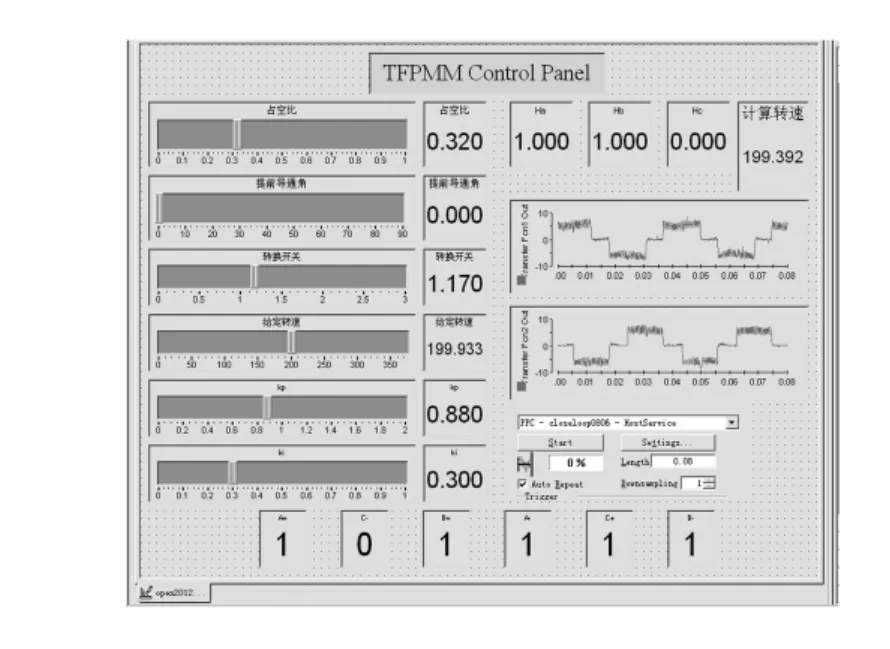
图6 虚拟控制面板参数及波形显示Fig.6 Display of parameters and waves on the virtual panel
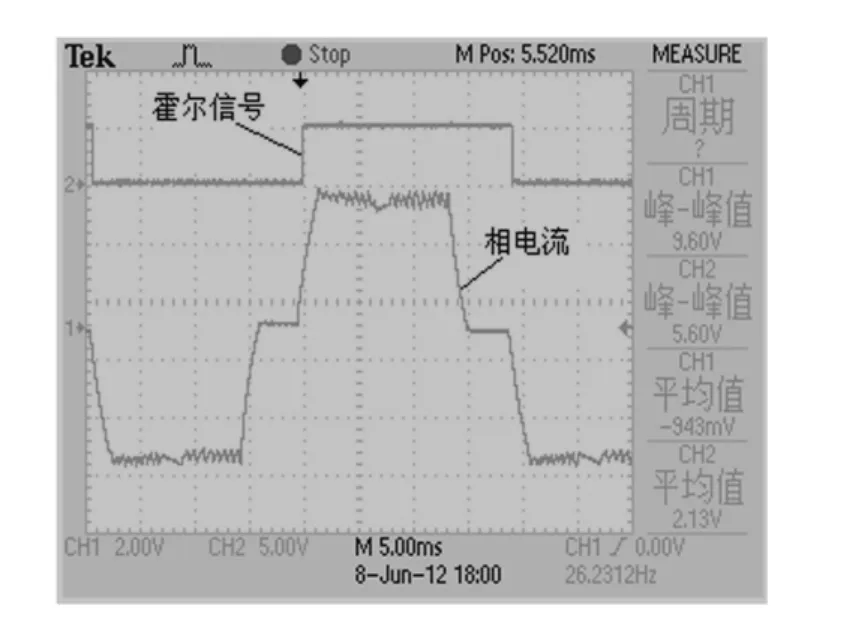
图7 相电流实验波形Fig.7 Actual waves of a phase current
3 结束论
通过MATLAB/simulink软件平台与dSPACE实时仿真系统的相结合,构建了新型TFPMM的速度和电流双闭环控制实验系统.仿真和实验结果均表明:该实验平台的可靠性,为今后解决更复杂的TFPMM驱动控制算法提供了基础.
[1] 陈金涛,辜承林.新型横向磁通永磁电机研究[J].中国电机工程学报,2005,25(15):155-160.
[2] 褚文强,辜承林.新型横向磁通永磁电机磁场研究[J].中国电机工程学报,2007,27(24):58-62.
[3] 王建宽,施进浩,江建中.横向磁场永磁电动机及其驱动系统的研究[J].微特电机,2005(11):14-16.
[4] 涂小涛.直驱式电动汽车用新型横向磁通永磁电机控制应用研究[D].武汉:华中科技大学,2012:14-16.
[5] 杨涤.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2003:339-342.
[6] 舒杨,李辉,孙永奎.基于dSPACE的无刷直流电机控制器快速开发方法[J].系统仿真学报,2008,20(8):2023-2025.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
四川冶金(2018年1期)2018-09-25 02:39:26
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59
电测与仪表(2014年21期)2014-04-04 12:32:08
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54