基于序列线阵图像分析的飞行目标攻角测试
2012-12-25 08:47马卫红倪晋平
弹道学报 2012年2期
马卫红,李 希,倪晋平
(西安工业大学 陕西省光电测试与仪器技术重点实验室,西安710032)
攻角是飞行体在飞行过程中轴线与其质心运动方向的夹角[1].在飞行体稳定性测量的理论研究中,攻角的变化是否正常是判断其飞行是否稳定的一个直接因素.飞行目标的稳定性理论是刚体弹道理论研究的重要内容之一,因此攻角的测试有着非常重要的意义.目前常见的攻角测试方法主要有纸靶法[1]、室内闪 光 阴 影 法[2]、狭 缝 摄 影 法[3]、线 阵 CCD 交 汇法[4].线阵CCD交汇测试由于后续成本低、结果时效性好引起研究者的关注.目前大多数的研究集中在测试原理的探讨和精度的理论分析上,对图像特征有效提取和空间尺度匹配的关注较少,这使得采用线阵CCD交汇技术测试攻角还很少有可靠实验结果的报道.在采用三角原理的角度测试时,要求2个方向的线长必须对应统一的尺度,否则将导致测试结果存在偏差,甚至无效.另外,飞行目标着靶时,距离相机位置不同,成像大小存在差异,在不能保证每次测试飞行目标穿过同一位置的情况下,很难利用单个CCD相机图像完成空间尺寸的标定,来获得飞行目标的实际空间坐标,从而完成一个方向的攻角测试.针对以上问题,本文采用双线阵CCD交汇原理进行攻角测试,重点研究由两对序列线阵图像分析获得攻角测试结果的关键技术问题.
1 测试原理
线阵CCD相机测试飞行体攻角是狭缝摄影的数字器件拓展,其原理如图1所示.无攻角情况下,飞行体速度矢量垂直(或不垂直)CCD阵列,自飞行体头至飞行体尾的飞行体轴线逐点进入相机视场的示意图如图1(a)所示.由于飞行体轴线与速度矢量一致,飞行体轴线被同一光敏元接收,因而再现的飞行体轮廓的飞行体轴线必然是水平的.图1(b)为飞行体飞行有攻角时,由于飞行体轴线与速度矢量不重合,自飞行体头至飞行体尾的飞行体轴线逐渐进入CCD视场,将被不同的光敏元接收.飞行体轮廓的轴线将不再是水平,而产生一定的倾斜,并且像方的轴线倾斜程度与物方攻角直接相关.因此,像面上飞行体轴线与水平线的夹角即为飞行体在测试状态下的攻角.

图1 线阵CCD采集飞行体图像原理图
通过分析,可以看出狭缝摄影的关键机理是使飞行目标的速度方向在固定视场的连续线图像采集中处于水平状态,进而通过分析目标的轴线方向获得攻角数据.在角度测试的2个方向,必须保证2个方向的数值具有统一的单位.由于测试的原理实质上是将速度方向转换到了水平方向,因而将目标穿过测试靶面时的不同空间位置对应到准确的采样间隔下,就成为可靠测试的关键.有2个方法可解决这一问题:一是保证图像采集速度和飞行速度一致,这样不用进行物像空间尺寸变换,直接对图像进行分析,获得目标像面位置变化斜率,即为攻角值;另一方法是将2个方向的位移量通过标定都换算到物空间或像空间.由于目标飞行速度在测试前不确定,无法将CCD采集速度与其设置一致,因此必须在飞行速度方向将目标轴向位移量对应到正确的采样间隔上.依据测试原理,轴线方向的数据可以定义为飞行目标多个位置着靶时对应的实际空间坐标,定义这些数据对应的采样间隔为飞行目标在CCD采样间隔的水平方向移动的实际距离,这样,2个方向实际上都统一到了物方空间,尺度一致.
基于图像分析的攻角测试重点在于得到飞行目标穿过测试光幕过程中,不同位置对应的像面位置或者实际空间坐标.飞行目标穿靶时,距离相机位置不同,成像大小存在差异,很难准确获得弹丸轴线在单方向上的空间移动量.在保证图像清晰的情况下,采用目标直径标定像元尺寸可以解决这一问题,然而线阵CCD视场一般很大,在离焦量大的情况下,边缘不清晰会造成标定误差.由于成本原因,早期的测试中希望利用单台CCD相机测试一个方向的攻角,进而由2个方向交汇计算空间攻角.但是,因为只有一个相机,无法交汇出目标的实际空间位置,而要根据一个相机采集到的序列图像确定目标在空间某一方向的位置,必须通过标定,如果测试过程中目标穿过光幕时与标定时的位置不同,就会因为物距发生变化,这使得先前的标定无效.因此,单相机测试攻角必须保证飞行目标着靶位置与标定的位置一致,图像清晰.
双CCD交汇立靶坐标测试方法,是一种不干扰弹丸飞行状态的测试方法,该方法通过2台正交放置的CCD图像采集系统采集弹丸穿幕图像[5],通过对2台CCD图像的联立分析,获得弹丸立靶坐标.该方法工作原理如图2所示,2台CCD相机正交共面布站,形成一公共光幕区,这就是弹丸立靶测试的有效靶面.

图2 双线阵CCD交汇测试原理图
两组高速线阵CCD相机与水平方向夹角分别为θ1、θ2,像距分别为f1、f2,正交放置,重合视场包含一矩形测试范围,两相机相对主光轴交点位置O清晰成像.飞行目标着靶时,物距分别为L1、L2,若飞过光幕的空间坐标为(x,y),则成像在各个相机的z1、z2像元位置处,其中z1、z2是相对于线阵CCD光学中心的像元位置,通过几何关系推导,代入测试系统结构参数数据,即可获得飞行目标特定位置的着靶坐标,在飞行目标的圆柱形部位,如图2所示,线阵图像中目标质心位置对应于物空间的轴上点位置.这样,一对有效线阵图像就可以获得一个轴上点的坐标,通过采集目标穿幕的多行图像,可以获得飞行目标的序列轴上点坐标.得到了多个轴上点坐标,就获得了目标轴方向的数据,将这些数据对应到正确的水平方向的坐标是获得可靠攻角数据的关键.水平方向的相邻点坐标间隔的物方空间距离是飞行目标在采样间隔的飞行距离,也就是速度在水平方向上的投影与CCD采样频率的乘积.CCD相机的采样频率可以通过软件或测试装置测定,飞行目标在水平方向的速度通过前置光幕靶测得,这样就可以得到序列轴上点对应在飞行方向上的采样间隔.
2 实验与分析
设计了一套攻角测试系统,如图3所示,两台CCD相机正交放置在一体化靶架下方,与水平方向成45°夹角,形成1m×1m的共同视场即为有效测试靶面.选择双光幕靶作为触发装置,同光源和控制箱均安装在一体化靶架上,触发双光幕靶平行于有效测试靶面,并靠近飞行目标发射位.一体化测试装置靶面垂直于弹道放置.当有目标飞临时,首先穿过平行放置于该靶面前方的触发光幕靶,由于目标的穿过改变了连续2个平行放置的光幕靶接收器的信号强度,当探测到这种改变后,第一个光幕靶立即输出触发信号启动CCD采集图像,2个光幕靶可高精度测试出目标水平方向上的飞行速度.计算机对采集到的两对序列线阵图像进行分析,获得弹丸多个轴上点的过靶坐标,结合测试系统参数,即可计算出弹丸的立靶坐标.
测试系统中,CCD像元数为2 048,采样行间隔最低为14.3μs,因为在实验室中,目标的速度较低,实验中设置采样间隔为42 μs.光学镜头焦距24mm,在实验室用长度78mm的螺钉作为飞行物进行了两次实测实验.图4(a)、图4(b)是实验1中螺钉头向前飞行时,2个正交CCD采集到的图像;图4(c)、图4(d)是实验2中螺钉头朝后飞行时,2个正交CCD采集到的图像,这些图像都是由CCD连续采集的多行线阵图像排列而成,采集顺序由上而下.由光幕靶测得实验1、实验2中目标飞行速度分别为6.49m/s、4.98m/s,这与图4一致,在相同的触发延时下,飞行速度慢的目标较晚进入视场.
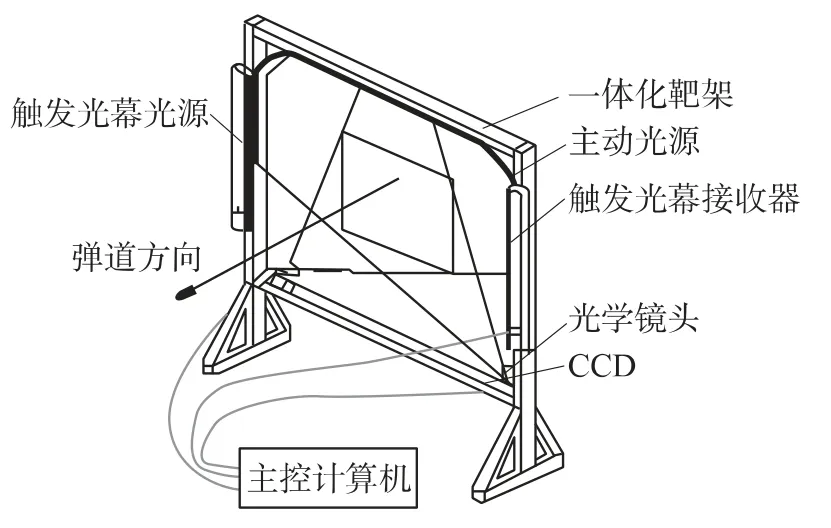
图3 测试系统示意图
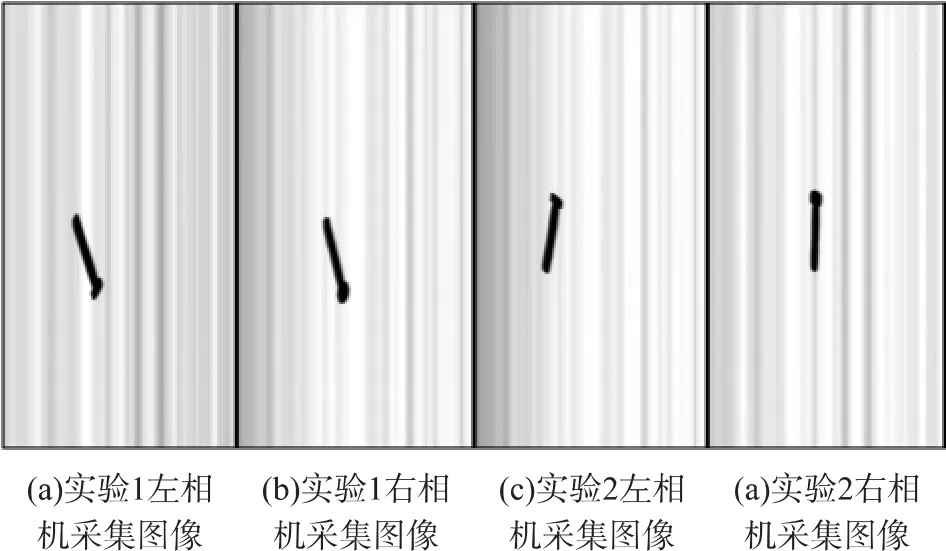
图4 系统采集到的多个线阵序列图像
处理中以触发后最初采集到的5行图像平均作为背景,通过探测之后采集到的图像与背景的差异,确定是否有目标穿过,采用质心算法获取目标的轴上点像元序号.已知目标水平方向的飞行速度v和CCD的行周期T,可以得到对应目标在穿过线阵CCD视场时各行之间对应的物空间水平间隔,即vT.接下来要求解弹丸在穿过测试视场时的多个轴上点坐标.
根据CCD交汇测试原理,对两幅交汇图像进行分析,得到轴上点对应的空间坐标(x,y),其中x轴为垂直飞行方向时幕面上的水平方向,y轴为垂直飞行方向时幕面上的垂直方向,z轴为弹道方向.结合系统参数,计算出飞行目标多个轴上点穿靶时的坐标.实验1分析结果如图5所示,图5(a)给出了沿飞行方向,序列轴上点的x坐标;图5(b)给出了沿飞行方向,序列轴上点的y坐标,在图5中,x坐标与y坐标数据已经与弹道方向的实际采样间隔对应.
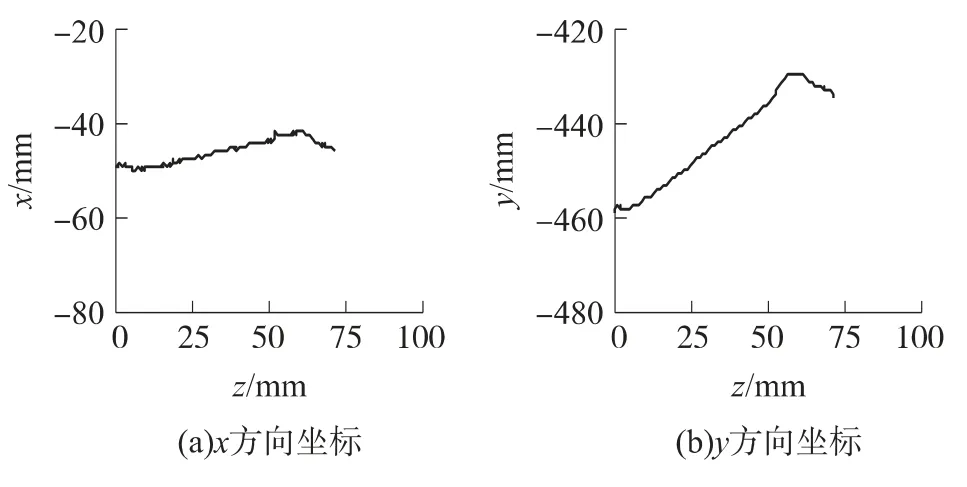
图5 交汇测量得到的飞行目标多个轴上点穿靶时的空间坐标
从图5可以看出,对于攻角测试来说,采用文中的方法,已经获得了两个方向统一尺度的曲线.斜入射时,由于飞行目标头部和尾部没有全部进入视场,这使得轴上点成像不对应线阵图像中目标的质心位置,因而造成粗大误差,因此必须剔除无效坐标.本文提出了一种由中间点向两端直线探测的方法来确定有效坐标点,剔除无效点.该方法从中间数据开始向两边搜索,为了有效抑制噪声点的影响,首先进行3点平滑,然后确定相邻点差分,因为直线段上各个位置的差分相等,所以认为差分相差过大的位置为无效数据,予以剔除,从而确定有效数据.
剔除无效数据后的结果如图6所示,图6(a)是轴上点偏移的三维离散数据图.图6(b)、图6(c)给出了轴上点的有效数据,直线分别是经过拟合得到的.从图6可以看出,实验1中目标的攻角是偏右上的.由于统一了空间尺度,因此数据经过直线拟合后,直线与水平方向的夹角即为攻角.经过计算,实验1中,飞行目标水平攻角为8.53°,垂直攻角为14.57°;实验2中,飞行目标水平攻角为17.47°,垂直攻角为-10.20°.
至此,本文给出了由序列正交图像获得空间攻角的过程,并给出了系统设计,实验验证了测试方法的有效性.
实验中测试目标飞行速度慢,在目标穿靶过程中,采集的图像行数多,利用直线拟合可以很好地提高测试精度.当飞行速度高时,采集到的图像行数就会减少,考虑到目标头部和尾部斜入射引入的无效数据,认为采集到目标穿靶图像行数大于10行,即可得到可靠数据,本文中使用的测试系统能够对长度(mm)/速度(m/s)大于0.3的圆柱形目标的攻角进行可靠测试.

图6 剔除粗大误差后的飞行目标轴上点坐标
3 结论
①在利用CCD交汇原理测试飞行目标攻角时,将目标轴上点的空间坐标位置与速度方向的采样间隔正确对应是获得可靠攻角的关键.采用单CCD相机测试攻角,必须确定目标轴上点在测试方向的实际偏移量.在保证测试时目标穿靶位置与像元尺寸标定位置一致的情况下,可通过目标直径标定像元对应的物方尺寸,进而计算出目标轴上点在测试方向上的相对位置值.
②利用交汇CCD立靶坐标原理,通过分析对应序列线阵的图像,就能获得目标不同位置穿过CCD光幕面时的空间坐标.由于目标头部和尾部经常会无规则进入视场,需要剔除无效的轴上点坐标.飞行目标水平速度与采样周期的乘积对应目标多个空间坐标点的采样间隔.通过直线拟合即可获得目标着靶过程的空间攻角.
③实验室低速目标飞行实验验证了测试方法的有效性.对于高速飞行目标,可依据飞行速度和长度,选用高行频相机.本文使用的测试系统能够对长度(mm)/速度(m/s)大于0.3的圆柱形目标的攻角进行可靠测试.
[1]刘世平,易文俊.弹丸飞行姿态的计算机采集与处理[J].弹道学报,2001,13(3):73-78.LIU Shi-ping,YI Wen-jun.Research of the collecting and processing method about projectile hole image on YAW card for projectile flight attitude[J].Journal of Ballistics,2001,13(3):73-78.(in Chinese)
[2]顾金良,陈平,夏言,等.数字式靶道阴影照相系统[J].弹道学报,2009,21(4):38-41.GU Jin-liang,CHEN Ping,XIA Yan,et al.Digital ballistic range shadowgraph system[J].Journal of Ballistics,2009,21(4):38-41.(in Chinese)
[3]李金珂,陈良益.基于线阵CCD的弹道同步式狭缝摄影系统[J].激光与红外,2009,39(3):300-303.LI Jin-ke,CHEN Liang-yi.A slit photography system based on linear CCD[J].Laser &Infrared,2009,39(3):300-303.(in Chinese)
[4]高昕,王颖,黄惠明.利用线阵CCD相机交汇测量弹丸攻角[J].光学技术,2002,28(4):376-379.GAO Xin,WANG Ying,HUANG Hui-ming.Linera CCD array cameras intersect measurement for nutation angle[J].Optical Technique,2002,28(4):376-379.(in Chinese)
[5]王坚,杜海,冯志远,等.多光幕交汇测量弹丸立靶坐标方法研究[J].飞行器测控学报,2009,28(4):69-71.WANG Jian,DU Hai,FENG Zhi-yuan,et al.A study on projectile target coordinate measurement method based on mutual impacting of light screens[J].Journal of Spacecraft TT&C Technology,2009,28(4):69-71.(in Chinese)
猜你喜欢
计算机应用(2022年2期)2022-03-01
计算机应用(2021年4期)2021-04-20
计算机应用(2021年1期)2021-01-21
中学生数理化(高中版.高考数学)(2020年3期)2020-05-25
宇航总体技术(2019年5期)2019-10-11
中学生数理化(高中版.高考数学)(2018年12期)2019-01-17
火力与指挥控制(2017年11期)2017-12-19
北京航空航天大学学报(2017年7期)2017-11-24
中学生数理化·高二版(2016年5期)2016-05-14
空气动力学学报(2015年3期)2015-04-14