
循迹避障小车在单片机教学中的应用
2012-12-22 07:03袁正道
河南广播电视大学学报 2012年3期
袁正道 赵 恒
(河南广播电视大学,河南 郑州 450008)
循迹避障小车在单片机教学中的应用
袁正道 赵 恒
(河南广播电视大学,河南 郑州 450008)
针对传统单片机教学过程中存在的学生学习兴趣不足、实训与实际工程应用脱节、硬件设备昂贵和设备维护工作量大等问题,本文提出了一种项目驱动教学法。通过设定几个难度依次提高的目标,使学生在具体项目中不断建立信心、提高实践能力。经过几个学期的实践,该实训方法在教学中取得了良好的效果。
循迹避障;单片机;项目驱动教学法
一、引言
近年来,单片机在汽车、通信、家用电器等领域的应用发展异常迅速,企业对单片机系统软硬件设计方面的人才需求也日益增加,这对学校人才培养方面提出了更高的要求。现阶段普通高校的单片机教学有两种主要形式:
(1)运用proteus软件进行仿真教学。这种形式非常适合于课堂教学演示,它能向学生直观地展示单片机的硬件连接和软件的运行过程等;但其缺点即是proteus软件中库元件有限,并且也不能仿真出工程应用中的实际问题,比如低功耗、按键抖动等。
(2)在单片机实验箱中做验证性实验。这种形式比软件仿真更接近真实情况,能让学生观察到单片机的实际尺寸、元件布局等。通过这两种形式的结合,即上课时运用proteus软件仿真,实验时在实验箱上进行仿真实验,能有效地提高学生对单片机系统的认识和编程熟练程度。但这两种形式也存在两点主要的不足之处:第一,在软件仿真和实验箱中只能做一些验证性实验,如IIC总线、AD转换、温度传感器等,并不能激起学生的学习兴趣,导致一部分学生对课程失去热情,最后丧失了信心。第二,在实验箱中做实验时,学生往往只关注程序的下载方式或特定外围设备的链接方法等,而对单片机的引脚分配、电源选择、抗干扰、成本控制等具体的工程问题不作深入的探究,这样导致了学生在遇到具体的单片机项目时感到无从下手,没有一个整体思路。
为了解决上述问题,本文提出了在单片机教学过程中引入项目驱动教学方法,具体来说就是找出能激发学生学习热情的项目,而且此类项目要能实现功能的扩充,即设定几个难度不断提高的目标,可以使学生在实践中不断树立信心,最终掌握一个典型单片机系统的整体设计。
二、整体框架简介
笔者在单片机课程设计中选定的题目是 《智能循迹避障小车》(以下简称小车)。小车由以下几个模块组成:单片机最小系统板、电机驱动板、循迹传感器、数码管显示、红外避障传感器、霍尔测速传感器和超声波测距传感器等。电路结构框架如图1所示:

三、典型电路模块介绍
下面结合原理图介绍循迹、避障、测速等传感器模块的工作原理。其中循迹传感器的原理图如图2所示,具体工作原理是:

图中D1为红外发光二极管,D2是红外接收三极管,D1和D2之间的光并不是直接传输,而是依靠地面反射。当地面为白色时,D2能接收到地面反射的红外光,其电阻变小,则比较器C1的负输入端电压Un减小。当Un小于正输入端电压Up时,输出电压为高电平;反之当地面为黑色时D2不能收到反射的红外光则Un大于Up,输出低电平。所以可以从输出端电压值判断地面上的黑线迹线的有无。可变电阻R3可以调节Up基准值,用于调节探测灵敏度。这样的循迹探头可以在小车前端并排放置5路或者更多,单片机读取5路探头的电压值就能判定车辆和黑色迹线的位置关系。当迹线位于小车正中间位置时控制小车直行;当发现迹线位于小车偏右方向时控制小车右转,反之则控制小车左转;从而控制小车随时根据黑色迹线的方向调整自身位置,最终实现循迹功能。
电动机正反转控制电路原理图如图3所示。图中由4个三极管连接成电桥,直流电动机接在中心桥臂上。当控制IN1、IN2输入为00时,Q1、Q3截止,电动机两侧电压为零,电动机停转。当输入为01时,Q3、Q2导通,电动机内部电流方向为自右至左,电动机反转。输入为10时Q1、Q4导通,电动机电流方向为自左至右,电动机正转。控制逻辑如表1所示。小车行走控制由两块H桥组成,当两个电动机都正转时小车直行,一正一反时小车转弯。
测速功能的实现,可以根据车架的结构在合适的位置安装传感器。例如有一款小车传动齿轮位置比较突出,学生可以在齿轮上钻出一个孔,将一个光断续器卡在钻孔的位置。光断续器连接电路如图4所示,当发光管和接收管之间没有隔断时光电三极管导通输出低电平,反之光通路被隔断后三极管截止输出高电平。当齿轮转到钻孔所在位置时光通路畅通,输出低电平,反之输出高电平。单片机不断查询光断续器输出端,当发现上升沿时就能判断齿轮已经转动一圈。通过测量齿轮转动一圈小车行驶的距离,再除以转动一圈的时间就能得到行驶的瞬时速度。另外有一款小车底座传动齿轮封装在所料壳内,没办法安装光断续器,学生在车轮上安装磁铁,在车架上安装霍尔传感器。每次车轮旋转到传感器位置,单片机就能收到一个触发信号。单片机统计在单位时间内车轮的转动次数,乘以车轮周长,也能计算出小车的瞬时速度。最终将小车的瞬时速度通过七段码显示出来。

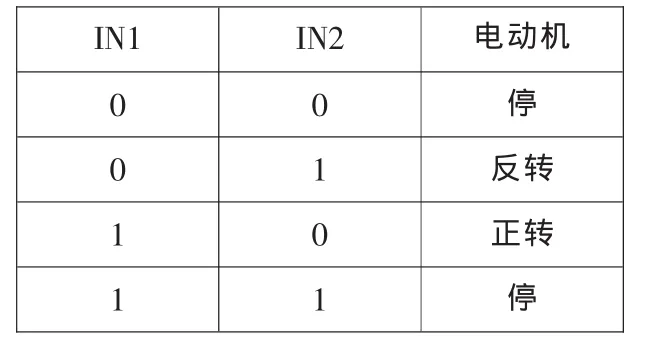
表1 电机控制逻辑表

避障功能的实现可以有多种选择,可以选择超声波传感器或红外避障传感器。红外传感器结构简单造价低廉,但是测距精度比较低,而且测距精度于被测物体的颜色有直接关系,导致当障碍物颜色比较深时避障效果较差。超声波测距精度高,只是成本较高,单片机程序复杂。本实训课程中让学生自由选择,在此只简要介绍超声波传感器测距原理。超声波传感器有4个引脚,分别是电源、地、触发输入和回响输出。首先单片机需要向触发引脚输出触发脉冲 (宽度在10到20微秒),然后超声波传感器就开始向外发射40KHz的超声波。当接收探头收到被测物反射回来的超声波后响应引脚输出一个高电平,持续时间和超声波从发射到接收的时间间隔相等。单片机只需要统计回响引脚的高电平时间,再乘以超声波在空气中的传播速度就能得到被测物与超声波传感器之间的距离。在车架四周安装多个超声波探头,单片机周期性的查询距离四周障碍物的距离。再根据距离信息调整小车的行进方向,从而避免碰撞。
单片机的程序方面,只需要周期性的查询5路循迹探头电平高低,判断小车和黑色迹线的位置关系,然后驱动左右两路电动机正反转,即可使小车实现循迹功能。
四、结论
综上所述,以循迹避障小车为基础平台,涵盖单片机教学的整个流程,从电源、模拟电路设计到单片机程序开发、传感器选择等各个环节。学生的积极性在这个项目的设计过程中被充分地调动起来。学生可以发挥自己的想象力对循迹小车的功能进行扩充,例如在本年度的教学中,给学生布置的基本任务是实现循迹小车,后续功能自行开发。学生通过网络查找相关资料,独立设计出了测速、避障、超声波测距、红外遥控等各种功能,取得了很好的教学效果。
[1]张艳玲.Keil与Proteus在高职单片机教学中的应用[J].器械管理开发,2011,(5).
[2]张玮,李众.高职高专基于宝贝车机器人的单片机课程改革[J].现代企业文化,2008,(29).
[3]李占芳,黄嘉兴.面向煤炭应用型人才的单片机课程教学改革探索[J].价值工程,2011,(7).
[4]石明江,顾亚雄,张禾.单片机原理与应用课程教学改革与实践[J].计算机教育,2011,(6).
[5]翟永前,蒋芳芳.基于MSP430单片机的智能数字电压表设计[J].化工自动化及仪表,2011,(3).
[6]许超,吴新杰,张丹.基于Proteus和Keil的单片机课程教学改革[J].辽宁大学学报(自然科学版),2011,(1).
G424.1
A
1671-2862(2012)03-0111-02
2012-01-15
袁正道,男,河南广播电视大学助教,研究方向:嵌入式技术与应用;赵恒,男,河南广播电视大学讲师,研究方向:嵌入式技术与应用。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
山西电子技术(2022年1期)2022-02-28
科技传播(2019年15期)2019-08-22
中国工作犬业(2017年8期)2017-08-22
电子制作(2017年1期)2017-05-17
电子技术与软件工程(2017年2期)2017-03-15
中国工作犬业(2016年12期)2017-01-04
西部广播电视(2016年16期)2016-11-09
电子制作(2016年11期)2016-11-07
