
基于地理信息的火炮综合导航系统方案设计
2012-11-23 10:17王屹华李凌峰
火炮发射与控制学报 2012年4期
赵 涛,王屹华, 李凌峰,庞 炜
(西北机电工程研究所,陕西 咸阳 712099)
基于地理信息传感器(地形识别装置、地磁传感器和重力梯度仪等)和同步定位与地图创建(Simultaneous Localization and Mapping,SLAM)构成的地理信息导航设备的成本较惯导系统低,因此在巡航飞行器、水中兵器和地面车辆系统中有广阔的应用前景。开展关于基于地理信息(地形、地磁和重力等)的导航技术研究,无论在学科基础前沿,还是工程应用方面,均具有迫切的需求。
本文讨论了基于地理信息综合导航研究的必要性及其国内外的发展概况,指出了发展所存在的问题和关键技术。最后,在如何提高地理信息综合导航技术在火炮导航系统中的应用,提出了几点建议。
1 基于地理信息的综合导航研究现状
1.1 基于地磁导航的研究现状
地磁导航作为一种自主导航技术,具有隐蔽性好、稳定和精度高的特点。2003年8月,美国国防部军事关键技术名单里提到地磁数据参考导航系统,国防部的文件称,所研制的纯地磁导航系统的导航精度为:地面和空中定位精度优于30 m(CEP),水下定位精度优于500m (CEP)。美国NASA Goddard空间中心和有关大学对地磁导航进行了研究,并进行了大量的地面试验。同时,国外正在建立更高精度的地磁信息图并重点研制高精度的磁传感器,以进一步提高导航精度。
美国生产的波音飞机上配备有地磁匹配制导系统,在飞机起飞降落时使用。俄罗斯的新型机动变轨的SS-19导弹采用地磁等高线制导系统,实现导弹的变轨制导,以对抗美国的反弹道导弹拦截系统。SS-19导弹再入大气层后,不是按抛物线飞行,而是沿稠密大气层沿地磁等高线飞行,使美国导弹防御系统无法准确预测来袭导弹的飞行弹道轨迹,从而大大增强了导弹的突防能力。
由我国研制的磁力仪,灵敏度和采样率高,南北工作跨度大,工作跨度可以适应世界任何地区(包括跨越地磁赤道海域),可连续24 h工作,在世界上处于领先地位。在地磁图方面,对相临海域的磁场精密探测航空调查也取得了一定成绩。
目前,关于地磁导航的许多关键技术还处于探索阶段。但是,随着高精度磁传感器技术的应用,以及地磁干扰建模技术、磁传感器配置探测技术等方面的突破,将大大促进地磁导航系统关键技术的突破与应用,促进地磁导航技术的发展与应用[1-3]。
1.2 基于重力场导航的研究现状
基于重力场的导航是在研究重力扰动及垂线偏差对惯性导航系统精度影响的基础上发展起来的一种利用重力敏感仪表的测量实现的图形跟踪导航技术,它要求事先制作好重力分布图,图中的各路线都有特殊的重力分布。
贝尔宇航公司研制的重力仪/重力梯度仪惯导导航系统可满足战略核潜艇、攻击型核潜艇和水下无人运载体的要求,其中重力梯度仪是关键元件,精度可达1E(1E=10-9CGS),整个系统可装在直径为21英寸的潜水器中,1h的CEP位置精度可达30 m,8 h的CEP位置精度为62 m。1999年和2000年美国Lockheed Martin公司就无源导航申请了专利,该系统包括周围介质测量系统、惯性测量装置、重力敏感器、重力图和滤波器等,它使惯性导航系统不再依赖于GPS、雷达、声纳等外部设备。国内在重力辅助导航方面的研究,主要是集中在匹配算法的研究,而对于重力传感器方面的研究鲜有报道,与国外相比还有较大的差距[4]。
1.3 基于SLAM导航的研究现状
澳大利亚悉尼大学菲尔德机器研究中心利用水下机器人Oberon在悉尼沿海进行了水下自然环境试验,结果证明了SLAM算法生成的估计是连续和一致的。
2000年,麻省理工学院利用真实海洋声纳数据的SLAM算法测试。试验以差分GPS(DGPS)的定位结果为标准,比较了离散处理和INS/ DVL获得的结果,证明了SLAM算法误差增长速率比INS/DVL要慢得多,具有在水下航行器上应用的潜力。
英国Edinburgh的Heriot-Watt大学提出了在执行海底探测使用由多普勒计程仪、三轴罗经和测扫声纳组成的系统来感知环境,以执行SLAM算法。证明了SLAM算法可以作为绝对定位手段如GPS或声基线系统的替代方法使用,也可以与他们协同工作,以辅助定位。
2004年,韩国汉城国立大学提出了自行研制的SNUUVI上应用基于测距声纳的SLAM算法,并在分别改变速度、距离和特征个数的各种不同仿真条件下进行了测试,证明了算法在真实环境中应用的可能性。除此之外,牛津大学以及西班牙的机器人视觉研究小组等机构也正在从事这方面的研究。如何能够圆满地解决这些问题,使算法可以真正地用于航行器的实时导航,是国际水下潜器导航界内人士一直孜孜追求的目标[5]。
2 方案设计和关键技术
2.1 方案设计
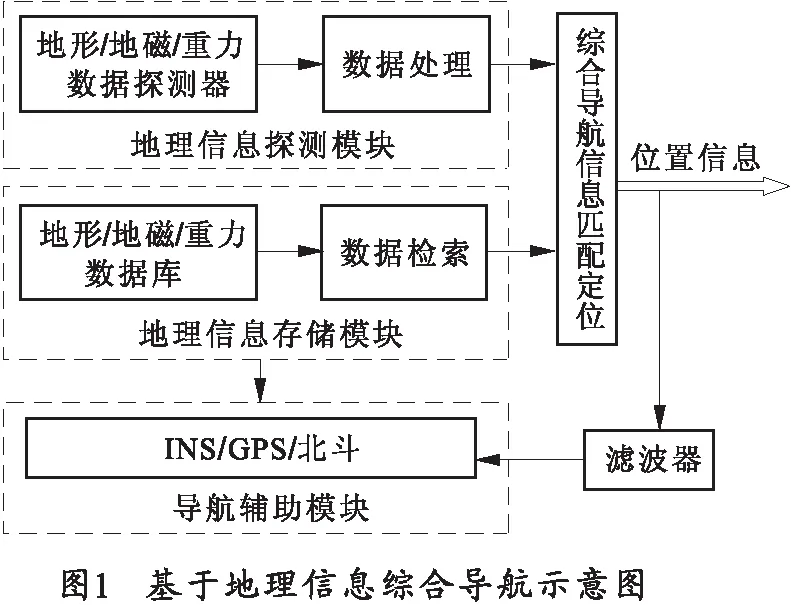
考虑到任何一种导航系统都不能保证在任何时候能提供全面和准确无误的导航信息,每一种导航方法都存在可用性问题的缺点,提出了基于地理信息的综合导航系统。它由以下部分组成:地理信息探测模块(包括地形/地磁/重力数据探测器和数据处理)、地理信息存储模块(包括地形/地磁/重力数据库和数据检索)、导航辅助模块(INS/GPS/北斗卫星辅助校准)、滤波器和综合导航信息匹配定位模块等。
基于地理信息综合导航系统示意图和硬件实现方案设计,如图1和图2所示。

2.2 主要关键技术
2.2.1 基准地理信息数据库的建立
实现任何以地理信息为基础的导航系统的前提是,必须建立所需要和符合质量要求的基准地理数据库。否则,不可能得到正确的使用。许多国家都在致力于建立自己的局部地磁场模型,其中美国、日本、加拿大、罗马尼亚等国家每五年测绘一次国家地磁图,我国每十年绘制一次国家地磁图,最近的地磁场模型是2000CGRF。
2.2.2 数字地图的制作
数字地图就是存储在计算机中数字化的地图,它是通过地理参数的离散化采样得到的。通过数据处理计算机,传感器测量的数据与存储在计算机存储的数字地图进行相关匹配,对火炮进行实时导航。同步定位与地图创建(SLAM)技术,有利于火炮在未知环境的自主导航。但是,当复杂的环境运动时,生成的维护和更新栅格地图的算法就比较复杂,对地图的存储空间和实时性要求也是一个挑战。
2.2.3 匹配算法的研究
匹配算法是基于地理信息综合导航的关键。目前应用的地理信息匹配算法主要是扩展卡尔曼滤波理论。但是,卡尔曼滤波算法所需要的各种误差统计模型不易获取,而且滤波的发散也不易控制。滤波器发散的可能性是使用这种方法的一个主要障碍。为了解决这一问题,常利用多模型估算算法,即并行的卡尔曼滤波结构,来减少大的初始位置误差和不确定性引起的滤波器发散,从而提高导航系统的性能。
2.2.4 地理信息传感器的研制和建模
地理信息传感器主要是地磁传感器、重力梯度计、声纳、激光测距扫描仪、激光和红外等传感器。我国在地磁传感器方面取得了相当进展,在世界上处于领先地位。但关于重力梯度计却未见有报道,需要进一步开发和研制。同时,地理传感器与其他导航传感器一样,在使用之前,必须建立精确的数学模型,以便消除噪声误差。
3 结束语
由于各种导航技术各有优缺点, 而且根据用途不同, 在实际应用时, 还无法替代, 因此,都处于不断发展的阶段。但是, 单纯地采用上面提到的单一的导航方法, 其精度和可靠性无法满足未来火炮导航技术发展的需求。基于地理信息的综合导航定位方法是未来发展的一个重要方向,应尽快提出行之有效的研究方法。特提出以下建议,以供参考。
1)研究先进的数据融合算法和多元信息融合技术卡尔曼滤波器,解决地形、地磁、重力梯度数据线性化问题,得到最优位置估计。
2)依托高精度地理信息传感器的研制,加快建立地磁、重力和等深线数据地图的建立步伐,逐步建立地理信息数据库,研究提高导航系统实时性、鲁棒性和准确性的地理信息匹配算法,提高数据地图的更新速度和精度,为实现基于地理信息的综合导航定位提供有力的支持。
3)发展多火炮之间的协同导航技术,利用火炮各自携带的传感器,共享导航传感器的信息,对相对位置关系进行融合,从而提高导航精度,解决导航误差随时间增加的问题。
[1] 李素敏,张万清. 地磁场在匹配制导中的应用研究[J].制导与引信,2004,25 (3) :19- 21.
LI Su-min,ZHANG Wan-qing. Study on the application of geomagnetic field contour in matching guidance[J]. Guidance & Fuze,2004,25 (3) :19-21. (in Chinese)
[2] 卢鸿谦,尹航,黄显林.偏振光/地磁/GPS/SINS组合导航方法[J].宇航学报,2007,28(4):897-903.
LU Hong-qian,YIN Hang,HUANG Xian-lin. Pola-rized-light/Geomagnetism/GPS/SINS integrated navigation[J]. Journal of Astonautics,2007,28(4):897-903. (in Chinese)
[3] 许小峰,孙涵,毛飞.关于地磁与空间微物理场及其应用系统研究的思考[J].中国科学基金,2007,6:321-327.
XU Xiao-feng,SUN Han,MAO Fei. Ideas on study of geomagnetism and micro physical fields of space and application systems[J]. Science Foundation in China, 2007,6:321-327. (in Chinese)
[4] 叶志伟,尹晖,张守建.AR模型谱在超导重力数据信号检测中的分析研究[J].武汉大学学报:信息科学版,2007,32(6):536-540.
YE Zhi-wei,YIN Hui,ZHANG Shou-jian. Using AR model spectrum algorithms to detect superconducting gravimetric signals[J].Geomatics and Information Science of Wuhan University, 2007,32(6):536-540. (in Chinese)
[5] 王文晶. EKF-SLAM算法在水下航行器定位中的应用研究[D]. 哈尔滨:哈尔滨工程大学, 2007:1-4.
WANG Wen-jing. Research on the applications of EKF-SLAM algorithm to the localization of underwater vehicles[D]. Harbin: Harbin Engineering University,2007:1-4. (in Chinese)
猜你喜欢
小哥白尼(神奇星球)(2022年5期)2022-08-15
一重技术(2021年5期)2022-01-18
中华养生保健(2020年10期)2021-01-18
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
科普童话·神秘大侦探(2020年3期)2020-05-11
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
电子制作(2018年11期)2018-08-04
百科探秘·航空航天(2016年9期)2016-12-01
小天使·一年级语数英综合(2016年9期)2016-05-14
