
不同负载条件下电磁弹射系统恒推力优化
2012-11-23 10:17李小民李治源李会来
火炮发射与控制学报 2012年4期
王 刚,李小民,李治源,李会来
(军械工程学院 光学与电子工程系,河北 石家庄 050003)
相比传统的弹射方式,如蒸汽弹射、火箭弹射,电磁弹射[1-2]可控性好、推力波动小、效率高。电磁弹射器主要由储能系统、电力电子变换系统、直线电机和控制系统四部分组成,其中直线电机是核心,本文采用双边永磁无刷直线直流电机。
在弹射过程中,一般要求加速度不变,即恒推力工作,而速度的增加会引起推力的下降,所以必须通过提高电压、PWM占空比等来补偿推力的下降,同时满足系统对推力波动的要求。在文献[3-4]对推力的分析,并未考虑速度的影响;在文献[5-6]中,分析速度在低速、中速和高速3种情况下的推力问题;在文献[7]采用的控制策略,在低速效果很好,在高速效果变差。
文中研究了不同负载、末速度下所需的推力,同时分析了速度、电压和占空比对推力的影响。在电磁弹射控制中,采用离线控制策略,根据速度的大小,查表获得相应电压和占空比。其中电压、占空比和速度的关系表通过直接搜索的方法得到。
1 电磁弹射系统分析
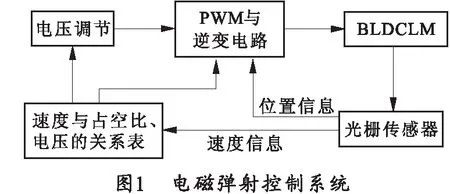
在电磁弹射过程中,为了保持推力恒定,在不同速度下,通过调整电压和占空比来进行补偿。控制系统如图1所示,采用光栅尺进行位置、速度的测量,位置信息用于换相;速度信号用于调整电压和PWM占空比,保持推力的恒定。在进行弹射之前,控制器初始化时根据末速度、质量、推力和推力波动的要求,计算出速度与电压、占空比的关系。在弹射过程中,根据速度的反馈,只需查表获得相应的电压、占空比,然后进行电压和PWM的调节。
电磁弹射系统平台一般要倾斜一定的角度,这样有利于物体的发射,发射示意图如图2所示。
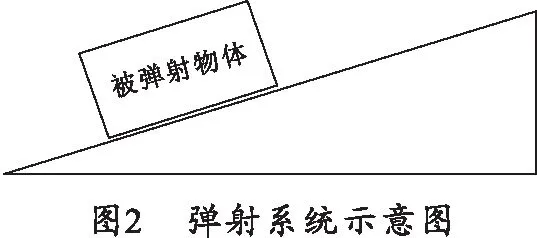
在进行弹射之前,已知的参数有:加速距离l,末速度vm,动子质量mp,被弹射物体质量m1,倾斜角θ,μ为摩擦因数。
(1)
对被弹射物体进行受力分析可得,无刷直线直流电机要产生的推力为:
f′=(m1+mp)a+μ(m1+mp)gcosθ+(m1+mp)gsinθ+fr
(2)
式中:fr为其他原因产生的阻力,从公式中可以看出,质量、末速度越大,所需的推力越大,对电机的要求越高。
2 无刷直线直流电机推力分析
2.1 无刷直线直流电机数学模型
无刷直线直流电机采用三相六状态控制, PWM调制。假设忽略磁路饱和,不计涡流和磁滞损耗,三相绕组均匀分布且完全对称,反电动势平顶为120°的理想梯形波,其等效电路如图3所示。

电机在工作过程中,任意时刻只有两相导通,第三相截止,不考虑换相过程。以A、B两相导通为例,等效电路如图4所示。

其数学模型为:
(3)
式中:ud为端电压;v为电机运动速度;当PWM信号为ON时,s=1;当PWM信号为OFF时,s=0。 反电动势与速度的关系E=kv,k为反电动势系数,为常数,解方程组(3)得:
(4)
(5)
2.2 速度引起的推力下降的补偿
首先分析速度、电压和占空比对推力的影响。推力大小主要由式(5)中ON时的第1项决定,可以看出,随着速度的增大,推力减小;电压的增大,推力增大,因此可以通过增大电压对推力下降进行补偿。
占空比对推力的影响,在此假设占空比的调节通过改变OFF信号的长度,ON信号长度不变。这样占空比对推力的影响也就是OFF信号时的推力变化,占空比减小,推力下降越多,1个周期内的平均推力越小,推力波动增大。从以上分析可以看出,占空比对推力大小影响很有限,可以进行微小的调整。
通过以上定性的分析,可以通过改变电压和占空比补偿速度引起的推力下降。从推力公式(5)中可以看出,推力是随时间变化的,为了对推力大小和推力波动进行比较,在1个周期,推力大小为:

在电磁弹射过程中,推力大小和推力波动要满足系统的要求,推力波动大小根据被弹射的物体进行设置,即:

(6)
式中:Δ为系统要求的推力波动大小。
公式(6)是不等式组,要计算出满足条件的电压和占空比,解出解析解太过复杂,电压和占空比取值也有限制,几乎无法取得解析解。由于占空比和电压取值范围较小,并且是一些离散点,因此可以采用直接搜索的方法获得满足系统要求的解。
3 电压和占空比的计算
当很难甚至无法得到满足条件的解析解时,可以采用搜索的方法。如随机搜索算法中的粒子群算法、蚁群算法和模拟退火算法等,这些算法在多维、多个极值点的解空间进行搜索时,具有很好的效果。但由于本文中电压和占空比组成的空间小,不要求取到极值点,所以采用直接搜索的方法。
在进行求解之前,根据公式(2)计算出所需的推力,以下为求解过程:
1) 参数初始化,设置电压和占空比的初始值。由于采用直接搜索的方法,初始点的设置对解的求解影响很大,即鲁棒性差,所以在进行初始值设置前,推力通过公式估算出所需的电压大小;根据系统推力波动的要求,计算出最小的占空比。
3) 终止条件,迭代最大次数或满足系统的要求。
参数的选择很重要,合理的参数选择可以降低计算量,并且得到满意的解。 在进行电压、占空比初始值的选择,通过式(5)估算出所需的电压,然后设置电压略小于该值,电压步长太小,占空比的调节作用就下降,若太大,占空比调节可能不能满足要求,因为占空比的调节范围是有限的。占空比过小将使推力波动超过系统的要求,通过不同的占空比步长计算,选择合适的步长。
Δf1的选择很重要,当推力小于要求的推力时,需要通过电压或占空比补偿电压调节进行补偿,当与要求的推力相差较小时,采用占空比补偿,相差过大,采用提高电压进行补偿。因此选择合适Δf1,可以使电压、占空比的调节效果达到最好。Δf1的选择可以通过仿真计算,在满足推力波动要求下,分析占空比可调节的推力范围,然后设置Δf1略小于该范围大小。
终止条件的选择,在本文中最大迭代次数选择60次。
4 仿真分析
通过仿真验证算法的可行性,仿真参数:被弹射物体质量分别为30、40 kg,要求在物体被弹射出去的瞬间速度达到25 m/s,加速距离3.2 m,倾斜角15°,摩擦因数0.01,重力加速度9.8 m/s2。其他原因产生的阻力100 N。通过公式(1)计算可得,弹射所需的推力为3 109、4 110 N。
弹射器采用双边永磁无刷直线直流电机,其参数:电感0.36 mH;电阻0.26 Ω;反电动势系数2.2 V·s/m。初始电压200 V,步长5 V,占空比最小值0.8,步长0.005,最大迭代次数60,速度范围5~25 m/s。 本文采用的是双边无刷直线直流电机,双边无刷直线直流电机由于对称,在仿真计算时,采用单边直线电机模型,所以需产生一半的力即可。在此认为所需的推力略大于理论计算的推力,所需的推力为1 600、2 100 N,以下为仿真结果:
质量为30 kg时,推力1 600 N,速度从5 m/s增大到25 m/s,图5为不同速度下的电压和占空比的大小,图6为通过优化后的推力曲线。


质量为40 kg,推力2 100 N,速度从5 m/s增大到25 m/s,电压和占空比的大小、推力曲线如图7和图8。

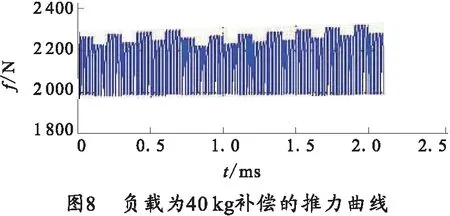
通过电压和占空比的调节,很好地补偿了速度增加引起的推力下降,该方法简单,不用很复杂的控制算法。根据推力公式,负载增加1 kg,所需增加推力大约100 N,电压增大6 V,电流增大约12 A,所以在进行弹射时,尽可能地降低动子和负载的质量。
5 结束语
本文给出了在给定负载、末速度的情况下,估算所需的推力的方法。在分析了速度、电压和占空比对推力的影响的基础上,采用直接搜索的方法搜索到满足要求的电压和占空比,以保持在不同速度下的推力恒定。文中的分析方法对实际弹射控制系统具有很重要的意义,但在实际中,理论推导得到的电压和占空比还需通过实验来进行修正,以获得更好的性能。
[1] PATTERSON D, MONTI A, BRICE C W. Design and simulation of a permanent-electromagnetic aircraft launcher[J]. IEEE Transactions on Industry Applications,2005, 18(18):566-575.
[2] MICHAEL R DOYLE, THOMAS CONWAY .Electromagnetic aircraft launch system EMALS[J].IEEE Transactions on Magnetic, 1995,31(1):528-533.
[3] YONG LIU, Z.Q.ZHU and DAVID HOWE. Direct torque control of brushless DC drives with reduced torque ripple[J]. IEEE Transaction on Industry Applications,2005,41(2).
[4] SAFI S K, ACARNLEY P P, JACK A G. Analysis and simulation of the high-speed torque performance of brushless DC motor drives[J].IEEE Proceedings Electric Power Application,1995,142(3):191-200.
[5] HWANG S M,LIEU D K. Reduction of torque ripple in brushless DC motors[J]. IEEE Transactionson. Magnetic, 1995,31(2):3737-3739.
[6] ZHU Y W, CHO Y H. Trust ripple suppression of permanent magnet linear synchronous motor[J]. IEEE Transaction on Magnetics, 2007(6): 12-16.
[7] 夏长亮,文德,王娟.基于自适应人工神经网络的无刷直流电机换相转矩脉动抑制新方法[J].中国电机工程学报,2002,22(1):54-58.
XIA Chang-liang, WEN De, WANG Juan. A new approach minimizining commutation torque for brushless DC motor based on adaptive ANN[J]. Proceeding of the CSEE,2002,22(1):54-58.(in Chinese)
猜你喜欢
大电机技术(2022年5期)2022-11-17
肇庆学院学报(2022年5期)2022-09-29
汽车实用技术(2022年12期)2022-07-05
资源信息与工程(2021年5期)2022-01-15
成都信息工程大学学报(2021年5期)2021-12-30
西安邮电大学学报(2021年1期)2021-04-19
军民两用技术与产品(2021年9期)2021-03-09
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
