滑移装船稳性控制模型的建立
2012-11-21 05:21王煦伟
天津职业院校联合学报 2012年2期
王煦伟
滑移装船稳性控制模型的建立
王煦伟
(天津机电职业技术学院,天津市 300131)
通过装船过程驳船受力、船舶稳性原理分析,建立自动调载控制中调载水量计算的稳性控制模型,完善了调载水量的计算。
大型结构物;稳性
随着海洋石油勘探开发事业的发展,开发海域逐步由浅海向深海延伸,导管架、平台组块等建造规模也朝着高、大、重的方面发展[1]。深水导管架的出现给装船与安装作业提出了新的课题。结构物拖拉滑移装船法应运而生。大型结构物滑移装船技术是利用绞车系统将大型结构物平稳的牵引到驳船上。
大型结构物拖拉上船后,通过调载水量的计算,调整相应压载舱内的压载水量,来达到调整驳船姿态的目的。通过建立稳性控制模型可以有效地对压载水进行调拨,以调整驳船的横倾、纵倾及首尾吃水等。
选择压载水舱和确定水位高度的过程模型如下:
一、确定结构物参数。根据滑靴的不同运用不同的Ansys分析模型,确定结构物对船的负载情况,主要是压力和压力的等效作用位置。根据结构物的外形和重量分布数据,得到结构物滑移上船的部分对船的压力情况,以及使船发生横倾纵倾的情况等。
二、确定等效调节位置。运用等效质量的方法,得到等效的力作用点A,根据船自身漂心位置和力矩平衡的原理,确定压载水调节的等效位置B,如图所示:

图1
三、确定压载水总量。因为力矩平衡有两个作用点即A,B两点,在A点处减少压载水舱的水,在B点处增加压载水舱的水量即可得到使船回到正浮状态的平衡条件,所以在A,B两点需要进行调节的压载水量是结构物等效重量的一半。
四、确定压载水舱的使用分布情况。当理想状态时,根据压载水的总量,取一个矩形底边,使重心的x,y坐标位于矩形的中心,即可得到一个相应的高度,这样得到一个整体的长方体体积即可以保证压载水的重心位置对应的z坐标最低,从而保证船的稳性要求。但实际情况下,压载水舱是彼此独立的,并非连续的整体,而且驳船的外形也约束了矩形底边的选取,因而各压载水舱的选择以及水位高度情况需要进行近似计算。
五、近似计算过程。选用船舶排水量计算的常用方法,使用楔形水块进行计算。因为每个水舱都是独立的而且每个水舱的重心位置是确定的。因为楔形水块的α角较小所以水量使用截面积相等来近似计算体积。各压载水舱的水量根据其底面面积进行分配,从而使实际的效果尽量近似理想的楔形水块。
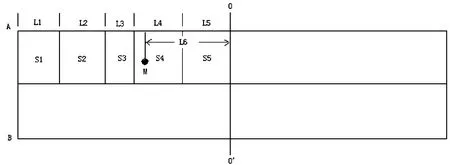
图2
六、楔形水块底边的确定。根据初稳性高的约束,AJ需要尽可能的长。同时AJ受船自身尺寸的限制,所以AJ长度需要保证AJ关于OO′对称,且能取到的最大长度。
计算实例:

图3
由结构物的等效作用点确定压载水的等效作用点为M,结构物上船的重量为p

根据以上数据进行图标分析如下:图4是有稳性和无稳性控制是横倾角的数据,图5是有稳性和无稳性控制的纵倾角的数据,图6是有稳性和无稳性控制的艏艉高度差的数据对比,图7是有稳性和无稳性控制的码头与驳船最大高度的数据对比。

图4 横倾角
可以看到有稳性控制使船的横倾角一直处于比较小的范围内,不采用稳性控制使控制质量明显较低。

图5 纵倾角
驳船体积比较庞大,纵向长度较大,所以纵倾角的变化不明显,图中可以看到,两种控制方式都能把纵倾角控制在一个较小的范围内,但相对而言,采用稳性控制的数据更加的平稳。
无稳性控制时,船的艏艉高度差比较大,而且有较大的波动,这对于结构物的滑移上船很不利,而且对船本身的稳定要求也很不利。
图中能够看到,虽然码头与驳船的最大高度差短时有稳性控制的数值比无稳性控制的要大,这是由于稳性控制是从整体的排放水考虑的,而且在这个工程中高度差很平缓的变化,有利于结构物的滑移装船,相比无稳性控制,高度的波动很频繁,增加了结构物拖拉的难度。从最终状态可以看到,由于稳性控制从总体考虑,在最后阶段,有稳性控制的码头与驳船的高度差小于了无稳性控制的方案。

图6 艏艉高度差

图7 码头与驳船最大高度差
[1]梅孝恒,周延东,樊之夏.带有间断不对称式滑靴的大型结构物拖拉滑移装船技术[J].中国海上油气(工程),1997,(09).
[2]王云煌.小倾角船舶稳性[J].世界海运,1995,(06).
[3]朱开源.浅谈几艘船舶的压载水系统[J].船舶,2003,(01).
[4]赵成壁,邹早建.船舶稳性计算程序 ESTAB[J].武汉造船,2001,(02).
On Slip Ship ment Stability Control Model
WANG Xu-wei
(Tianjin Electromechanical Technology College,Tianjin 300131 China)
The thesis analyzes the barge loading force and the ship stability principles and sets up a stability control model of adjustable load water calculation under automatically adjustable load control.As a result,the adjustable load water calculation is f ulfilled.
large-scale str uctures;stability
U674
A
1673-582X(2012)02-0054-04
2011-09-27
王煦伟(1980-),女,天津市人,天津机电职业技术学院讲师,从事机电一体化研究。
猜你喜欢
中外文摘(2022年13期)2022-08-02
初中生学习指导·提升版(2022年2期)2022-03-08
中国舰船研究(2021年4期)2021-08-31
中学生数理化·八年级物理人教版(2020年5期)2020-10-29
星星·诗歌理论(2020年3期)2020-04-24
船舶与海洋工程(2019年2期)2019-05-20
高中生学习·高三版(2017年9期)2017-10-26
中国煤炭(2016年9期)2016-06-15
读写算·教研版(2016年6期)2016-03-28
船海工程(2015年4期)2016-01-05