基于高精度PWM技术的超声波电动机控制
2012-10-31 06:53:48曹胜华
微特电机 2012年11期
曹胜华,金 龙
(1.国电南京自动化股份有限公司,江苏南京 210003;2.东南大学,江苏南京 210096)
0 引 言
超声波电动机是一种新型的直接驱动型微电机,其原理完全不同于传统的电磁电机,它既没有电磁绕组和磁路,也不是通过电磁的相互作用来传递能量,而是利用压电陶瓷的逆压电效应激发出定子弹性体的机械振动,此振动通过定转子之间的接触摩擦来传递能量。与传统的电磁电机相比,超声波电动机具有低速大转矩、不受磁场影响、同时本身也不产生磁场、惯性小、动作响应快、控制特性好、无输入自锁、定位精度高、结构简单、重量轻、噪声小、可直接驱动负载等优异特性[1-2],是对传统电磁电机的突破和有力补充。由于超声波电动机可直接驱动负载,不使用齿轮变速,既简化了机械结构,也避免了使用齿轮变速所带来的噪声、振动、间隙以及低效率、难控制等一系列问题。超声波电动机作为执行元件,在工业控制系统、汽车专用电器、超高精度测量仪器、办公自动化设备、智能机器人、医疗器械、高教器材、电动窗帘等领域具有广泛应用前景。
超声波电动机是基于高频机械振动和摩擦驱动来工作的,工作过程十分复杂,电机的参数会随着温度和驱动条件的变化而变化,动态数学模型是一个高阶、非线性、参数时变的系统,精确数学模型难于建立,因此超声波电动机的控制系统技术水平对电机的性能好坏影响很大。伴随超声波电动机控制技术研究的深入,超声波电动机控制技术单靠应用传统PWM技术已经满足不了控制精度的要求,这里介绍一种基于高精度PWM技术的超声波电动机控制技术,并给出UMC60型超声波电动机的实验验证。
1 控制原理
在各种超声波电动机类型中环形行波型超声波电动机的应用是最广泛的,在各种超声波电动机控制特性中速度控制应用也是最广泛的。所以这里主要研究环形行波型超声波电动机的速度控制技术。这里选择UMC60型超声波电动机为控制对象开展速度控制技术研究。
根据环形行波型超声波电动机工作原理,需要高性能二相高压驱动电源驱动来形成环形行波,因此电机速度控制技术有调频调速、调幅调速和调相调速三种[3]。UMC60型超声波电动机调速特性曲线如图1~图3所示。
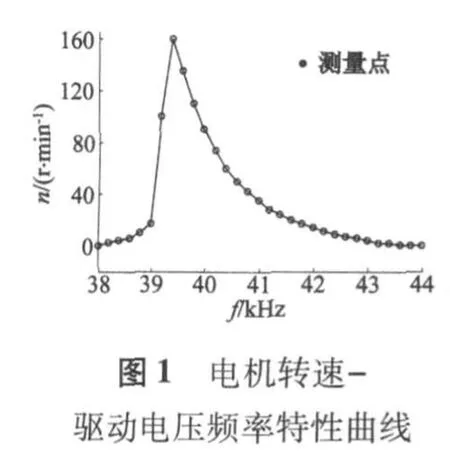
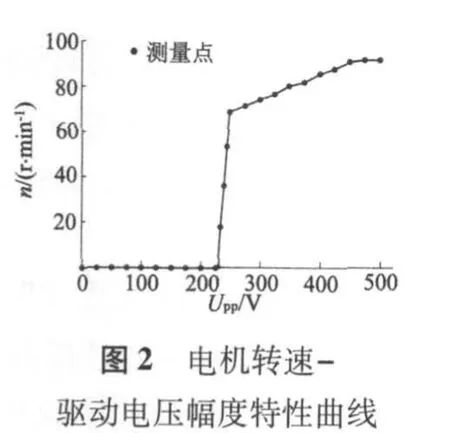
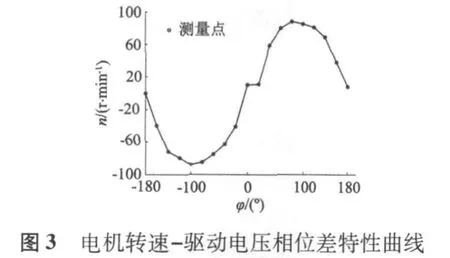
在调频调速、调幅调速和调相调速三种调速方法中,调相调速存在控制复杂、存在死区等诸多问题,调幅调速也存在调速范围窄、存在死区等诸多问题,因此通常使用调频调速作为主要调速方法。
为了控制超声波电动机工作,控制系统需要产生高性能二相驱动电源,具体形成过程如下:(1)由DSP产生四路PWM波输出;(2)经过接口匹配电路电平变换后输入IR2103驱动器;(3)IR2103驱动器输出信号控制推挽式逆变电路(含场效应管和变压器)产生高性能二相驱动电源。如图4所示。

图4 超声波电动机控制器驱动部分硬件框图
通过上面分析知道,通过控制四路PWM波输出可以达到控制高性能二相驱动电源的目的,但UMC60型超声波电动机工作电压频率在40~44 kHz之间,工作调频频带较窄,因此要进行速度的精细控制还是有一定难度。
2 解决方案
根据UMC60型超声波电动机工作条件要求,驱动电压频率在40~44 kHz之间。
2.1 传统PWM控制技术解决方案
控制系统以TI公司32位DSP芯片TMS320F2812为核心[4]。TMS320F2812 是美国 TI公司推出的C2000平台上的定点32位DSP芯片,适用于工业控制、电机控制等领域,用途广泛。系统工作时钟快达150 MHz,处理性能达150 MIPS,每条指令周期6.67 ns。具有出色的DSP控制性能,双电源供电,具有SPI、SCI等通信接口,通过事件管理器管理PWM硬件。
TMS320F2812利用DSP的事件管理器,产生所需PWM波。具体过程如下:通过对定时器1相应的寄存器正确设置,就能利用DSP内在的PWM硬件产生电路按照正确的控制逻辑产生要求的PWM波。定时器1产生两路PWM波HIN和LIN的原理如图5所示。HO和LO为IR2103输出的驱动场效应管信号。通过调整定时器1的寄存器值可以实现调频功能。

图5 PWM波产生示意图
DSP系统工作时钟频率为 fSYSCLK,根据以上PWM波产生原理,为了保证波形对称和相位90°不变,每增加或减少4个fSYSCLK才能变化一个工作频率点。电机工作频率最小fwmin,最大fwmax,控制系统总计N个工作频率点:

当 fSYSCLK=60 MHz,fwmin=40 kHz,fwmax=44 kHz,则 N=34。
当 fSYSCLK=100 MHz,fwmin=40 kHz,fwmax=44 kHz,则 N=58。
当 fSYSCLK=150 MHz,fwmin=40 kHz,fwmax=44 kHz,则 N=86。
通过提高系统工作时钟频率从60~100 MHz,增加工作频率点ΔN=24。
通过提高系统工作时钟频率从60~150 MHz,增加工作频率点ΔN=52。
随着DSP系统工作时钟频率的提高,控制系统的工作频率点增加,所以提高DSP系统工作时钟频率能提高速度的精细控制能力,但提高也是有限的,因为DSP系统工作时钟频率不可能无限提高,如TMS320F2812系统工作时钟频率最高150 MHz,对应工作频率点只有86个[5]。
2.2 高精度PWM控制技术解决方案
控制系统以TI公司32位Piccolo系列DSP芯片TMS320F28035为核心。TMS320F28035具有很高的性价比,出色的DSP控制性能,单电源供电,小封装,系统工作时钟频率适中(60MHz),带一个浮点运算核,具有增强型eCAN、SPI、SCI等通信接口,具有增强型eQEP正交编码接口、增强型ePWM接口、eCAP接口等控制接口,特别为提升电机控制应用能力增加了HRPWM模块,将电机控制常用的传统PWM控制技术提升为高精度的PWM技术。
HRPWM模块内部包含有MEP控制部分,可将系统工作时钟频率fSYSCLK进行细分,细分典型值为tMEPSTEP=0.15 ns,即1个 SYSCLK 最多能被 MEP STEP细分成8位二进制数,这样PWM可以控制这8位二进制数值来提高PWM控制精度。如图6所示。
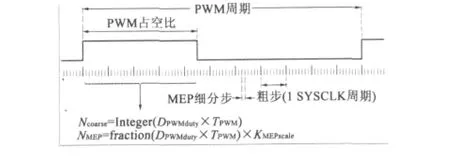
图6 MEP控制示意图
先通过HRCNFG、HRPWR、HRMSTEP控制寄存器进行HRPWM模块基本设置,然后通过TBPHSHR、TBPRDHR、CMPAHR对相位、周期、比较等控制寄存器设置来完成高精度PWM产生。


式中:INT()为取整数计算。
通过采用高精度PWM控制技术,在同一工作条件下(fSYSCLK=60 MHz,fwmin=40 kHz,fwmax=44 kHz),增加工作频率点ΔN=3640。
即使不同工作条件下(fSYSCLK从150 MHz降低到 60 MHz,fwmin=40 kHz,fwmax=44 kHz),增加工作频率点ΔN=3588。
以上计算分析可以得出以下结论:
(1)采用高精度PWM控制技术,在同一系统工作时钟频率,能极大地提高超声波电动机调频调速控制精度;
(2)采用高精度PWM控制技术,比采用传统PWM控制技术(通过提高系统工作时钟频率来提高超声波电动机调频调速控制精度方法),能更有效地提高超声波电动机调频调速控制精度。
3 实验结果
为了验证超声波电动机调速控制效果,使用基于高精度PWM技术的超声波电动机控制系统对UMC60型超声波电动机进行速度伺服控制。实验以电机转速正弦轨迹跟踪为具体控制目标,实验结果曲线如图7所示。图中S1、CH1为电机的设定转速曲线,S2、CH2为电机的实际转速曲线,S3、CH3为转速跟踪误差曲线。通过S1、CH1与S2、CH2的比较可以看出,无论是仿真结果还是实际运行结果,尽管存在跟踪误差,但电机转速基本可以跟随设定速度的变化。图7(c)为电机跟踪状态进入稳定后的运行情况,CH1为电机实际转速曲线,CH2为转速跟踪误差曲线。从图7(c)可以看出电机的时变性会对运行稳定性产生的影响持续存在。

4 结 语
通过计算分析,采用高精度PWM控制技术,即使在同一系统工作时钟频率,也能极大地提高超声波电动机调频调速控制精度;采用高精度PWM控制技术,比采用传统PWM控制技术,能更有效地提高超声波电动机调频调速控制精度。基于高精度PWM技术的超声波电动机控制系统对UMC60型超声波电动机进行速度伺服控制实验,其结果显示高精度PWM控制技术是适合超声波电动机速度控制的。验证了此控制技术的正确性和设计的有效性。该技术能满足精细速度控制要求,易于工程应用。
[1]胡敏强,金龙,顾菊平.超声波电机原理与应用[M].北京:科学出版社,2005.
[2]赵淳生.超声波电机技术与应用[M].北京:科学出版社,2007.
[3]王心坚.行波超声波电机伺服控制特性理论与实践研究[D].南京:东南大学,2008.
[4]苏奎峰,吕强,耿庆锋,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
[5]曹胜华,金龙,陈溪,等.超声波电机控制技术实验研究[C]//第十五届微特电机技术创新与发展论坛论文集.西安,2009.
猜你喜欢
能源工程(2021年5期)2021-11-20 05:50:42
宇航计测技术(2018年3期)2018-09-08 02:21:36
物联网技术(2017年7期)2017-07-20 14:09:05
中文信息(2016年11期)2017-02-11 16:48:48
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
现代电子技术(2015年22期)2015-12-02 21:20:58
电源技术(2015年9期)2015-06-05 09:36:07
电子技术与软件工程(2015年6期)2015-04-20 16:11:10
海军航空大学学报(2015年4期)2015-02-27 13:45:51