Z源逆变器在永磁同步电动机驱动系统中的应用
2012-10-31 06:53:46陈利萍张建文严双喜王金鹏
微特电机 2012年11期
陈利萍,张建文,严双喜,王金鹏
(中国矿业大学,江苏徐州 221008)
0 引 言
永磁同步电动机(以下简称PMSM)因具有体积小、功率密度高、效率和功率因数高等诸多优点而越来越多地应用于各种工业场合,其传统驱动系统由二极管整流器、直流侧电容以及逆变桥构成[1],该系统存在诸多缺点。第一,系统前端为二极管不控整流,输出直流电压平均值(约为输入相电压有效值的2.34倍)正比于输入电压幅值,当电网电压发生跌落时,直流输出电压不可避免地随之降低,而大多数电网电压跌落为0.1~2 s即可恢复正常的短时故障,因此系统不具有度越电网电压跌落的能力,PMSM控制性能将受到严重影响;第二,不控整流增加了电网电流的谐波含量,系统功率因数较低;第三,传统VSI属降压型,当交流侧负载要求输出较高电压时,这种普通结构的电压型逆变器受限于电网电压幅值,在中间直流侧增加一级升压电路虽然可以对整流输出电压进行升压,但增加的升压电路不仅增加了系统硬件成本和控制的复杂性,而且降低整个系统的可靠性;第四,传统VSI需设置死区延迟,以防止逆变桥直通,而死区效应会引起波形的畸变,使电机产生噪声,影响低速运行性能[1]。近年来国内外学者研究较热的Z源逆变器(ZSI)具有直流升压及较高的抗扰性等诸多优点[2],将Z源逆变器应用于PMSM驱动系统能够有效克服传统驱动系统的不足,使系统有效度越电网电压跌落故障,降低电网谐波电流,提高系统功率因数。本文在分析Z源PMSM驱动系统原理的基础上,仿真验证了所研究系统的优越性能。
1 Z源驱动系统拓扑及工作原理
图1、图2分别为传统PMSM驱动系统及Z源PMSM驱动系统主电路。Z源PMSM驱动系统主电路同样由二极管整流前端、直流侧电路及逆变桥组成,不同之处在于直流侧电路由Z源阻抗网络构成,取代了传统驱动系统中的升压电路。
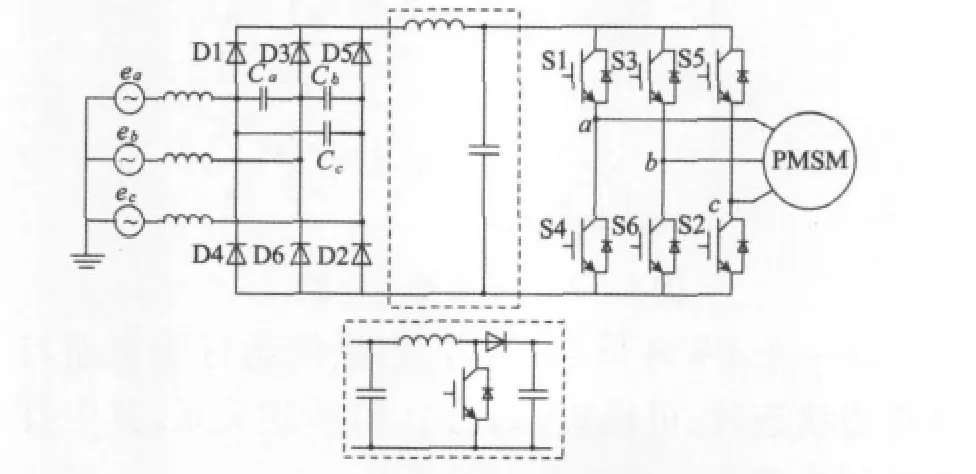
图1 传统PMSM驱动系统主电路
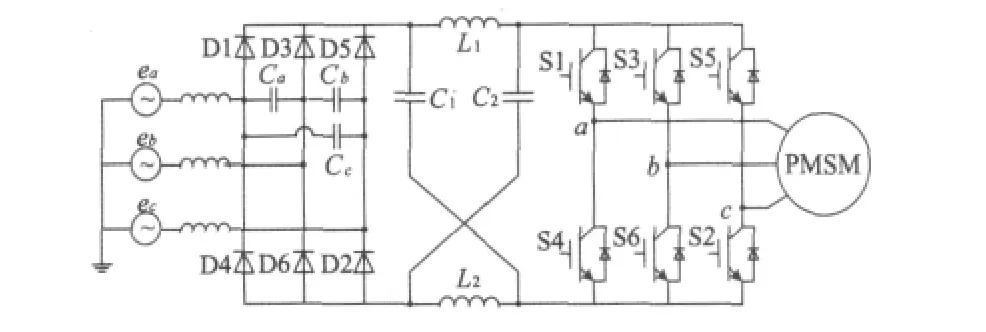
图2 Z源PMSM驱动主电路
1.1 前端整流器分析
如图2所示,PMSM驱动系统正常运行时,前端整流器任意两相之间连接有输入电容Ca、Cb、Cc,该输入电容不仅为阻抗网络提供直流电压,而且可以有效抑制直通及器件换流时产生的浪涌电压[1]。对系统进行分析,任意时刻只有电压差最大的两相导通,因此在一个电网电压周期内共有六种导通模式,对应导通的二极管及连接的电容,如图3所示。
由图3,不同的导通二极管组合对应连接不同的电容,每一种导通模式下,系统整流部分可以简化为一个直流电压源串联两个二极管,以a、b相导通为例,系统简化拓扑如图4所示。因此系统在一个电网电压周期内等效为六种导通模式下的普通Z源逆变系统,每一种导通模式下的Z源逆变系统升压原理如下所述。
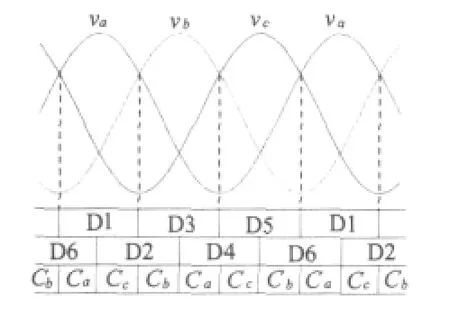
图3 整流器六种导通模式
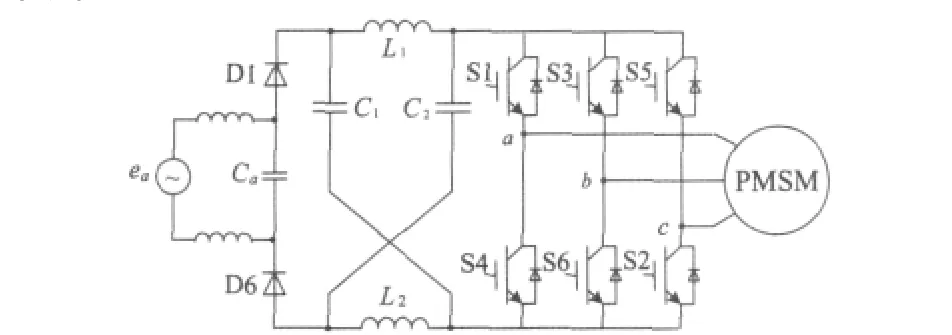
图4 a、b两相导通时系统简化拓扑
1.2 Z源逆变器升压原理
图5为ZSI主电路[2]。阻抗网络由电感L1、L2与电容 C1、C2组成(L1=L2,C1=C2),系统正常运行于直通与非直通两种状态。由阻抗网络的对称性:

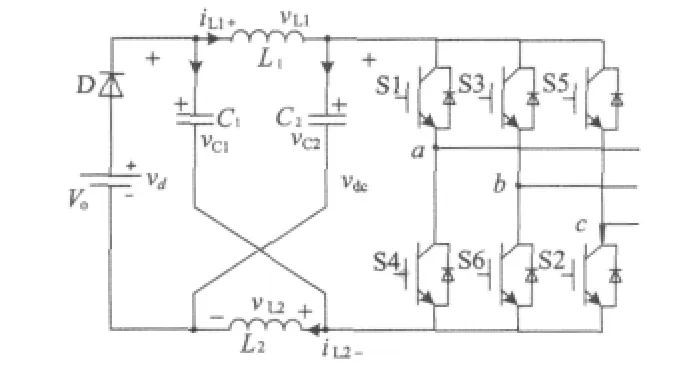
图5 Z源逆变器主电路
在一个PWM周期Ts内,当系统运行于直通与非直通状态时,可得式(2)、式(3)所述关系,其中直通时间为Tsh。
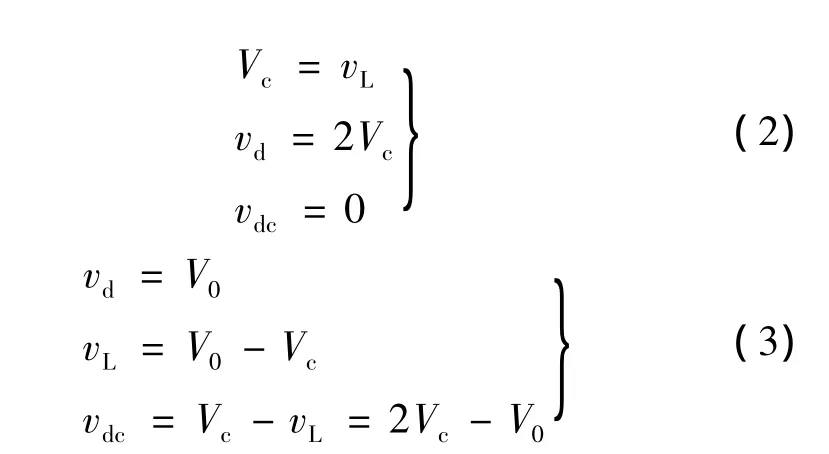
系统稳态运行时,由伏秒平衡原理:
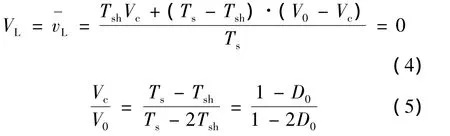
逆变桥输入直流母线电压平均值及其峰值分别:
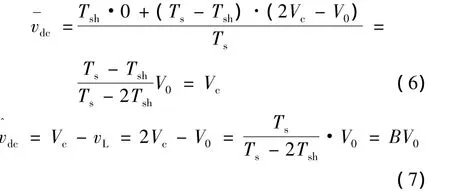
式中:B为直通零矢量对应的升压因子。ZSI输出相电压基波幅值:

因此,配合控制直通占空比D0与调制因子M,理论上可输出任意大小的交流电压。调制因子M的最大取值范围取决于逆变器的调制方法,采用SPWM时,M≤1;采用SVPWM时,M≤。为了提高直流电压利用率,本文采用一种不引入附加开关损耗的直通分段 SVPWM[2-3]取代传统 SVPWM,该调制法将直通状态插入于每一个开关周期内的零矢量作用区间,不改变有效矢量作用时间,只对有效矢量作用区间进行了左右平移,因此,与恒直流输入时采用传统SVPWM的输出相比,只存在部分高次谐波的差异,对负载的作用效果基本相同。
2 PMSM矢量控制
2.1 PMSM数学模型
将d轴定向于PMSM转子磁链方向,可得d、q轴系下PMSM电压、磁链、转矩与运动平衡方程。
定子电压方程:

定子磁链方程:

电磁转矩方程:

运动平衡方程:

式中:ud、uq为 d、q 轴电压;id、iq为 d、q 轴电流;R1为定子相电阻;Ld、Lq为d、q轴电枢电感;ψf为转子磁链;ψd、ψq为 d、q轴磁链;p为电机极对数;ω 为转子旋转电角速度;p为微分算子;Te为电磁转矩;B为阻力系数;J 为转动惯量[5-7]。
2.2 Z源驱动PMSM矢量控制原理
目前PMSM矢量控制方法有id=0控制、UPF控制、恒磁链控制、最大转矩电流比(MTPA)控制、弱磁控制及最大输出功率控制等,其中id=0控制因其控制原理简单、实现d、q轴电流静态解耦而成为PMSM矢量控制常用的控制方法,其定子电流中只含有转矩分量[8]。本文所述Z源驱动PMSM矢量控制系统为了有效度越电网电压跌落等故障,在传统控制结构的基础上增加了逆变器直流侧电压控制部分,系统控制原理图如图6所示。正常状态下,直通状态的插入使Z源逆变器将二极管整流输出的波动直流电压升压至非直通状态时逆变桥侧的稳定的直流电压Vdc;电网电压跌落故障时,只需要根据检测到的降低的二极管整流输出电压Vo及设定的非直通状态时逆变桥侧直流电压Vdc,即可计算出需要的直通占空比D,以动态调节D来实现稳定非直通状态下逆变桥侧直流电压的作用。因此,系统在整个运行期间需始终采用直通分段SVPWM。
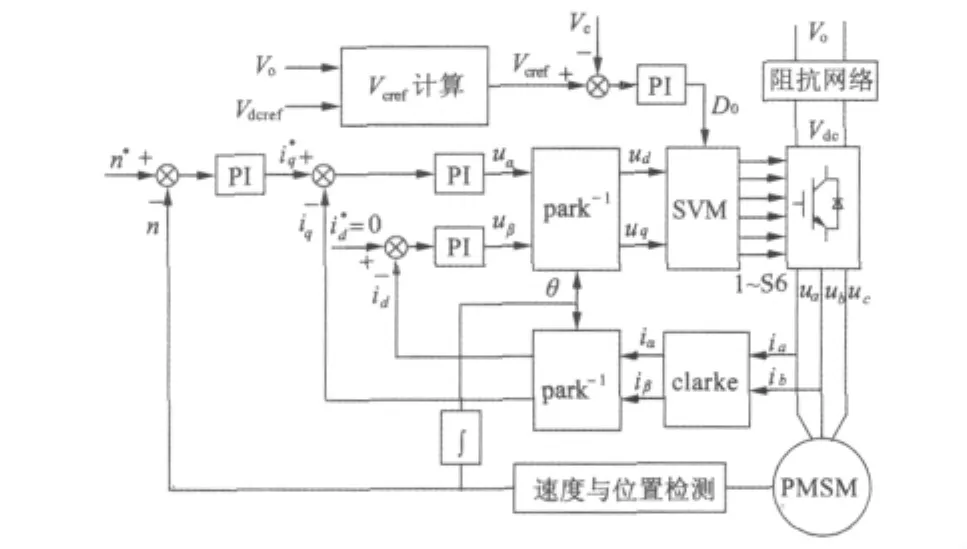
图6 Z源驱动PMSM矢量控制系统原理图
3 系统仿真
基于MATLAB/Simulink对Z源PMSM驱动系统进行仿真分析,PMSM参数设置如表1所示。电网相电压幅值为90 V,在0.3~0.7 s内跌落至70 V,负载转矩Tl在0.5 s由2 N·m突变到4 N·m,给定Vdc=250 V,电机给定转速n*=800 r/min,载波频率f=5 kHz,Z网络电感LL=2 mH,Z网络电容LC=330 μF,仿真结果如图7所示。
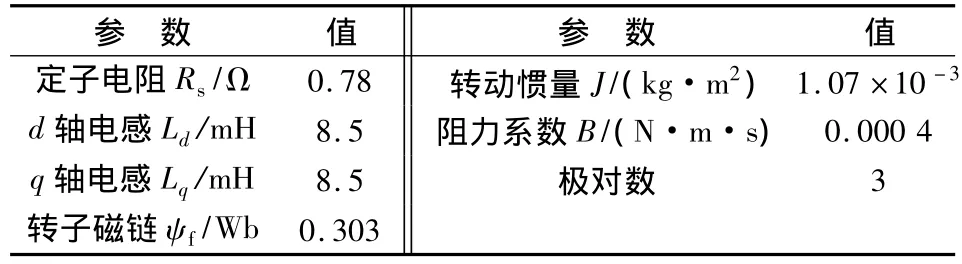
表1 系统仿真参数

图7 电网电压跌落时系统仿真波形

4 结 语
本文将Z源逆变器应用于PMSM驱动系统,通过对直通占空比的实时调节,获得幅值稳定的逆变桥直流侧电压,有效度越电网电压跌落故障,提高系统的自愈性,同时省略传统PWM调制时需考虑的死区延迟,增强系统抗干扰性能,阻抗网络的存在降低了网侧电流谐波,提高系统功率因数及可靠性,改善传统驱动系统的诸多不足,具有良好的应用前景。
[1]Peng Fang Zheng,Joseph A,Wang Jin,et al.Z - source inverter for motor drives[J].IEEE Transactions on Power Electronics,2005,20(4):857-863.
[2]Peng Fang Zheng.Z - source inverter[J].IEEE Transactions on Industry Applications,2003,39(2):504 -510.
[3]顾斌,钱照明,房绪鹏,等.Z源变频调速系统及其空间矢量PWM 控制方法[J].电气传动,2005,35(5):13 -16.
[4]房森林,章跃进.基于离散位置信号的永磁同步电动机空间矢量控制[J].微特电机,2010(7):51-56.
[5]Tursini M,Parasiliti F,Zhang Daqing.Real- time gain tuning of PI controllers for high - performance PMSM drives[J].IEEE Transactions on Industry aplications,2002,38(4):1018 -1026.
[6]郎宝华,刘卫国,贺虎成,等.基于最大转矩电流比动态磁链给定的直接转矩控制[J].电气传动,2008,38(1):23 -26.
[7]王江涛,刘海琴,王剑.新型永磁同步电动机无传感器智能控制系统[J].微特电机,2010(8):51-55.
[8]杨明,付博,李钊,等.永磁同步电动机矢量控制电压解耦控制研究[J].电气传动,2010,40(5):24-28.
猜你喜欢
莆田学院学报(2021年5期)2021-11-13 06:36:38
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
西藏艺术研究(2021年4期)2021-06-02 09:41:46
今日农业(2020年20期)2020-12-15 15:53:19
甘肃科技(2020年20期)2020-04-13 00:30:22
现代防御技术(2016年1期)2016-06-01 12:13:28
电测与仪表(2016年1期)2016-04-12 00:35:12
新高考·高一物理(2016年1期)2016-03-05 22:47:39
体育科技(2016年2期)2016-02-28 17:06:01
创业家(2015年1期)2015-02-27 07:52:08