变速集成发电机的变细分模糊PID调速控制
2012-10-31 06:53:46张玉峰李声晋周奇勋
微特电机 2012年11期
张玉峰,李声晋,卢 刚,周奇勋,周 勇
(1.西北工业大学,陕西西安 710072;2.西安科技大学,陕西西安 710054)
0 引 言
变速集成发电机组(以下简称VSIG)相对于传统发电机,具有体积小、效率高、节能降噪、对柴油机速度范围利用充分等优点,广泛应用于移动电源、后备电源、风力发电、汽车电源等领域[1-3]。柴油机转速的适应性系数低,受负荷影响大,需要配备油门调节机构调整供油量以保证系统的稳定运行。步进电动机由于结构简单、输入与输出具有严格的对应关系,不受电压波动和负载变化的影响,并且不累计控制误差,非常适合用作油门调节执行机构[4]。
VSIG作为一个多变量、非线性、非稳态的系统,在运行阶段调速范围宽且负载性质、大小等都具有不确定性,采用常规的PID控制率很难满足控制要求。将模糊控制与传统PID控制相结合的模糊PID控制具有较强的非线性逼近能力,适合于VSIG这类非线性、时变及纯滞后系统的控制,文献[5-6]将模糊PID率应用于柴油机调速,通过仿真或实验证明在误差较大时能够取得较好的调速性能,但小误差时调速控制效果不好、稳态控制精度低。
本文以两相混合式步进电动机作为油门调节执行机构,针对模糊自校正PID在稳态调速时的不足,利用细分控制技术改善执行机构的控制精度,将模糊自校正PID与执行电机细分控制技术相结合,提出一种新颖的变细分模糊PID调速控制策略。
1 调速控制器结构
VSIG调速控制器结构如图1所示。控制器依据转速误差驱动执行步进电动机调节油门开度,以实现供油量的实时调节。此外,调速控制器实时检测各环节,以实现对VSIG系统的综合监控和控制功能。
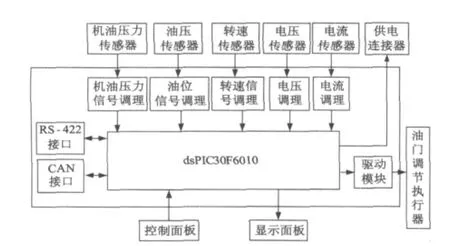
图1 调速控制系统结构框图
2 变细分模糊PID调速控制设计
2.1 VSIG调速控制率设计
目前柴油机的调速控制以PID控制率及其改进算法为主。其中模糊自校正PID不依赖于被控对象精确的数学模型,有较强的动态性能和鲁棒性能,但模糊自校正逻辑控制器引入的控制参数贯穿整个过程,针对性差、参数选择不易;在稳态扰动较大时,积分环节容易产生饱和现象,破坏系统稳定性。为此,本文提出一种变细分模糊自校正PID调速控制策略,其控制原理框图如图2所示。

图2 变细分PID参数模糊自校正控制器结构
变细分模糊自校正PID在各阶段采用不同细分数增强控制参数的针对性:在动态调整过程中,采用较大细分数以保证良好的动态调速性能;进入稳态范围后,采用较小的细分数以减小步进电动机抖动引起的稳态误差,提高积分环节,消除稳态误差的性能。
2.2 PID参数模糊自校正设计
数字增量式PID的数学形式如下:
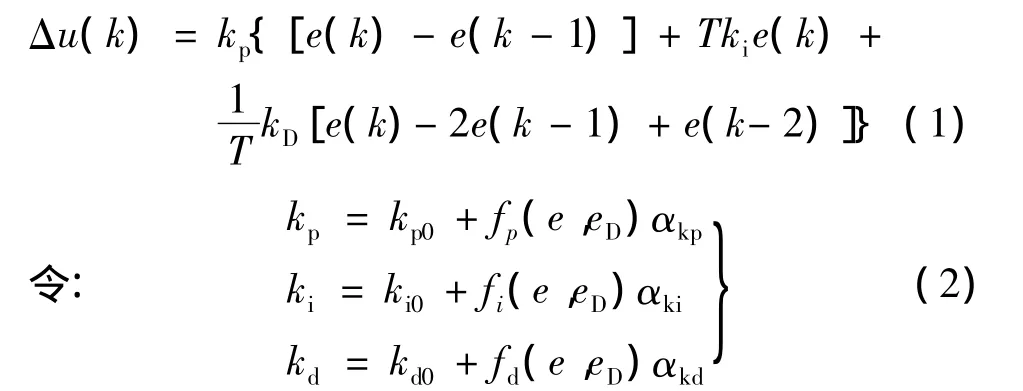
式中:kp、ki、kd为校正后的参数;kp0、ki0、kd0为初始化参数;fp(e,eD)、fi(e,eD)、fd(e,eD)为采用参数模糊校正器得到的增益校正值;αkp、αki、αkd为调整系数,如图3所示。

图3 PID校正参数模糊推理输出曲面
校正器包括一个常规PID调节器和模糊校正器。转速偏差和偏差的变化率作为输入,PID参数的校正值作为输出,根据模糊控制规则做出推理,实现参数的校正。
2.2.1 校正系统输入输出变量模糊化
设某时刻的转速误差和转速误差变化率分别为e(k)和 eD(k),则有:

对系统转速误差e和误差变化率eD,以及校正参数fp、fi、fd进行模糊化。对模糊校正调节器二维输入e、eD和三维输出fp、fi、fd划分相同模糊子集如下:e、eD、fp、fi、fd={NB,NM,NS,ZO,PS,PM,PB}。映射到模糊集上的论域:e、eD、fp、fi、fd=[-1,1]。
将柴油机的速度误差范围划定为[-50,50]r/min;转速误差变化率的范围划定为[-10,10](r/min)/s,超出范围的作为边界值处理;输出参数fu(e,eD)的范围划定为[-100,100];则对应的量化因子分别为 0.02,0.1,0.01。
人民不再只是坐着,相信别人的胡言乱语。——诺贝尔和平奖得主格鲍伊公开表态支持“占领华尔街”运动,认为“自己的问题,只有自己解决”
2.2.2 建立参数自校正规则
根据kp、ki、kd对系统调速控制器输出特性的影响[7-9],结合本系统对控制参数的具体要求,建立Δkp、Δki、Δkd参数的校正模糊规则集,如表1所示。
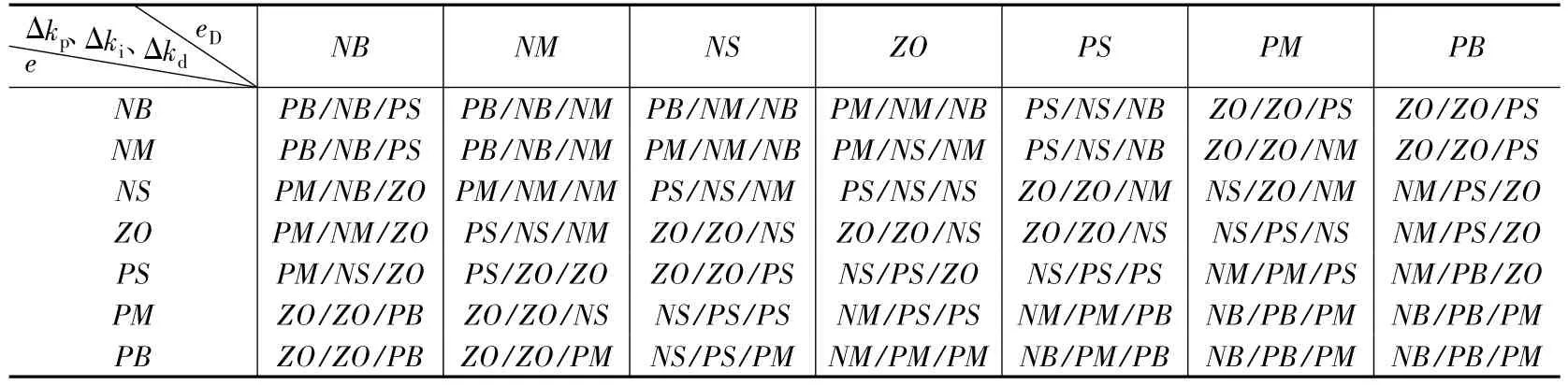
表1 Δkp、Δki、Δkd参数调整模糊规则集模型
2.2.3 模糊推理规则建立及校正参数的解模糊
依据表1建立的校正参数推理规则,按照Min-Max推理方法,得到校正参数的输出曲面,如图3所示。
实际应用中,必须用确定的值清晰化模糊推理结果。本文采用重心法进行去模糊。
2.3 变细分驱动控制
以两相混合式步进电动机作为油门调节执行机构时,若以步距角为单位进行控制,则在低频时会在稳定平衡点产生衰减振荡,从而影响油门调节控制精度,并带来振动及噪声。通过细分控制使实际步距角减小,可大大提高控制精度,并减小或消除振荡,降低噪声,抑制转矩波动。
不计铁心饱和并忽略主磁导高次谐波时,两相混合式步进电动机的矩角特性为正弦曲线,如图4所示。通以A、B两相电流时,转矩可表示:

式中:k为比例系数;θe为转子的电角度位置。
若两相绕组分别通以如下电流:
式中:α为期望的转子定位电角度,将式(5)代入式(4),得:

由式(6)可以看出,两相混合式步进电动机的细分是通过控制两相绕组中电流的大小,使步进电动机按照同步运行方式旋转。电机内部的合成磁场为圆形空间旋转磁场,合成磁场的矢量大小决定了电机的转矩大小,相邻两个合成磁场矢量的夹角为细分之后的步距角。
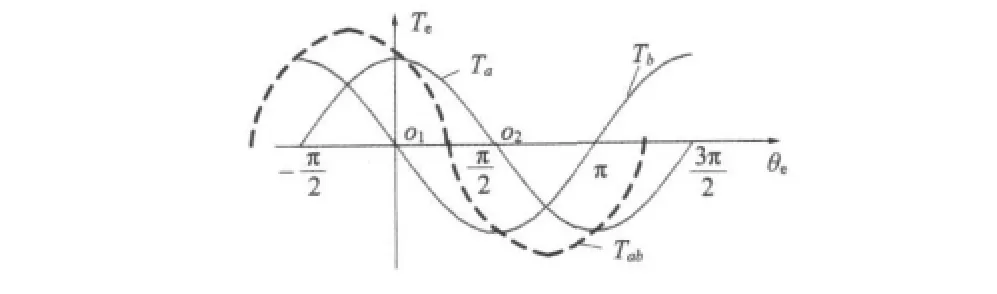
图4 两相混合式步进电动机的矩角特性
VSIG在调速的动态阶段和稳态阶段,对油门调节电机的控制要求和控制精度不尽相同,因此可采用变细分控制:在动态调整阶段对步进电动机采用较粗的细分步数,可减小振荡并保证动态响应性;在进入稳态运行阶段后,加大细分数,可抑制稳态运行阶段由于转矩脉动引起的扰动,提高稳态调速精度。
3 试验及分析
为验证系统功能和性能,本文进行了样机实验。样机为单缸、四冲程、风冷、直喷式VSIG系统,标定转速nN=3000 r/min,标定功率PN=3 kW。运行速度范围为2250~3000 r/min。油门调节电机采用42BYGH型两相混合步进电动机。为调试方便,编制了上位机,采用 RS422通讯接口,波特率57600 b/s。
系统调速性能试验通过对系统施加阻感负载进行测试,速度曲线如图5所示。图5(a)、图5(c)为固定4细分下采用模糊参数自校正PID的调速曲线;图5(b)、图5(d)为变细分模糊PID控制的调速曲线,动态调整阶段采用4细分,进入设定误差带后采用32细分。图5(a)、图5(b)为施加150%阻感负载时的速度曲线;图5(c)、图5(d)为额定转速下施加10%阻感负载时的速度曲线。
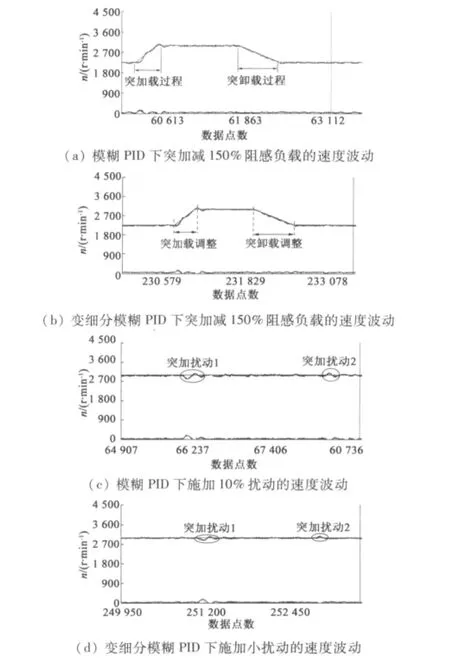
图5 不同调速策略下施加扰动的调速曲线
从图中可以看出,固定细分下采用模糊参数自校正PID进行调速控制时,速度响应快,但调整过程过冲较大,在小扰动及稳态运行时,速度波动较大。采用变细分模糊PID进行调速时,既保证了调速的动态性能,又改善了小扰动及稳态调速性能。
4 结 语
针对VSIG宽运行范围内的调速监控,研制了一套综合调速监控系统,结构简单,功能完备。针对模糊PID在稳态调速效果不足的问题,将调速控制策略与执行电机驱动策略相结合,提出变细分模糊PID调速控制,以实现VSIG在整个运行范围内良好的动静态调速性能。样机实验验证了所设计的调速控制系统及调速控制策略的有效性,能够显著改善模糊控制器在稳态时的控制精度。
[1]Al- Khayat N,Al- Tayie J,Seliga R.Stand alone adjustable speed power generating set[C]//10th Internet Conference on Harmonics and Quality of Power.2002:639 - 642.
[2]Grzesiak L M,Sobolewski J.Electrical Energy Source with variable speed diesel engine,controlled by using the neural voltage regulator[C]//2005 European Conference on Power Electronics and Applications.2005:1 -8.
[3]Leuchter J,Rˇerˇucha V,Krupka Z,et al.Dynamic behavior of mobile generator set with variable speed and diesel Engine[C]//PESC 07-IEEE 38th Annual Power Electronics Specialists Conference.2007:2287 -2293.
[4]沈锐,卢刚,李声晋,等.基于步进电动机SPWM驱动的发电机调速控制[J].微特电机,2011(12):43-49.
[5]夏耀洲,朱从乔.基于修正因子模糊数模型的柴油机调速技术研究[J].内燃机工程,2004,25(1):51-53.
[6]McGowan D J,Morrow D J,Fox B.Multiple input governor control for a diesel generating set[J].IEEE Transactions on Energy Conversion,2008,23(3):851 -859.
[7]李鑫,卢刚,李声晋,等.基于模糊PID算法的轮式机器人驱动轮控制器设计[J].微特电机,2011(11):57-64.
[8]宋百玲,费景洲,宋恩哲.船用柴油机模糊-PID复合调速及快速控制原型研究[J].内燃机工程,2010,31(4):54 -58.
[9]周勇.用于四轮纯电动车辆的电控驱动系统设计研究[D].西安:西北工业大学,2011:49-52.
猜你喜欢
岷峨诗稿(2020年4期)2020-11-18 23:54:01
华人时刊(2020年23期)2020-04-13 06:04:12
宇航计测技术(2018年3期)2018-09-08 02:21:36
物联网技术(2017年7期)2017-07-20 14:09:05
专用汽车(2016年9期)2016-03-01 04:17:02
专用汽车(2015年2期)2015-03-01 04:05:42
纺织导报(2014年9期)2014-10-31 00:07:58
中国记者(2014年1期)2014-03-01 01:36:30
中国高新技术企业(2014年1期)2014-01-14 08:31:50
发明与创新·小学生(2013年8期)2013-04-29 00:44:03