
影像测量系统中运动干扰图像的复原方法研究
2012-10-23 10:04杨建国李蓓智
制造技术与机床 2012年5期
周 虎 杨建国 李蓓智
(东华大学机械工程学院,上海 201620)
机械加工的精度很大程度上取决于测量技术的发展。基于机器视觉的影像测量系统是一种非接触式测量方法,是以现代光学为基础,融光电子学、计算机图像学、信息处理和计算机视觉等科学技术为一体的现代测量技术,正成为一种提高生产率和保证产品质量的关键技术,具有广阔的应用前景[1]。
但是,影像系统的测量精度依赖于所摄取的待测工件的图像质量,而相机一般安装在三坐标工作台上,曝光过程中由于运动干扰或其它因素引起的相机与待测物之间的相对运动将导致图像模糊,从而影响图像的清晰度,增加后续图像处理的难度。这在流水线上的在线检测中更为常见。为此,本文对引起运动图像模糊的机理进行了分析,并提出了对应的图像复原方法。
1 运动图像退化模型分析
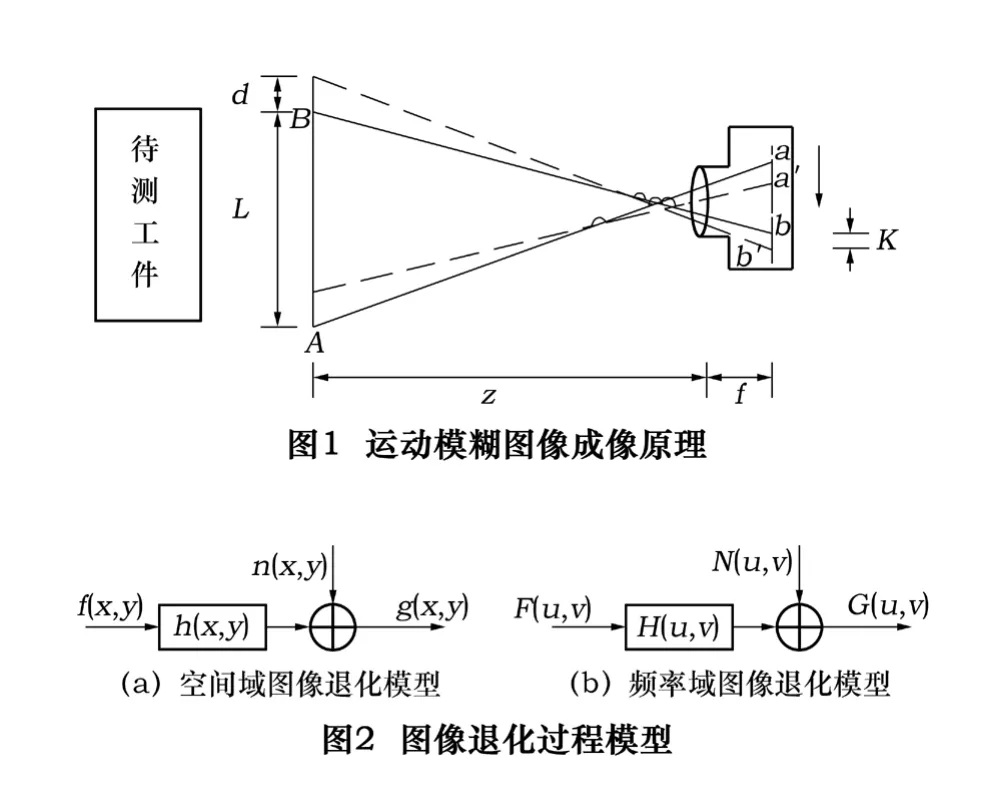
图1为待测工件成像过程中由于和相机之间的相对运动造成运动图像模糊的模型图。
假设输入的图像f(x,y)经过运动退化系统h(x,y)后产生退化图像g(x,y)。在退化过程中引进的随机噪声为加性噪声n(x,y),则图像退化过程空间域模型如图2所示(如果是乘性噪声,可用对数转换方式转化为相加形式)。
其一般表达式为[2]

或者

式中:“*”表示空间卷积;h(x,y)是退化函数的空间描述,它综合了包括运动模糊在内的所有退化因素,h(x,y)也称为成像系统的冲击响应或点扩散函数;H[f(x,y)]表示对输入图像f(x,y)的退化算子。
频率域上的图像退化模型表达式为

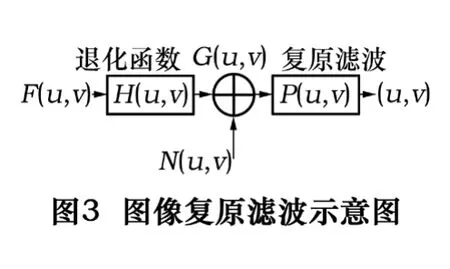
式中:G(u,v)、H(u,v)、F(u,v)、N(u,v)分别是g(x,y)、h(x,y)、f(x,y)、n(x,y)的傅立叶变换。H(u,v)是系统的点冲击响应函数h(x,y)的傅立叶变换,称为系统在频率上的传递函数。
由于数字图像处理系统处理的是离散的图像,可将连续模型中的积分用求和形式表示,同时借助线性矩阵向量来表达,得到二维离散降质图像的退化模型为
式中:g、f、n为M×N维列向量,H为块循环矩阵,包括M×M个分块循环矩阵,每一部分的大小为N×N。
2 复原函数的估计方法
图像复原的主要目的是在给定退化图像g(x,y)以及退化函数H、噪声的某种了解或解释时,估计出原始图像f(x,y)。但是退化函数是未知的,因此必须对退化函数H进行估计。
当成像传感器与被摄景物之间存在足够快的相对运动时,所摄取的图像就会出现运动模糊,即图像获取时被图像与传感器之间的线性运动模糊了。这种退化具有普遍性,数学推导如下:
假设图像f(x,y)进行平面运动时,x0(t)和y0(t)分别是在x和y方向上随时间相应变化的运动参数,则记录介质任意点的总曝光量是通过对时间间隔内瞬时曝光数的积分得到。假设快门的开启和关闭所用的时间极短,设T为曝光时间长度,并忽略成像过程其它因素干扰,则由于运动造成的模糊图像g(x,y)为

上述公式表明,运动模糊图像是由景物在不同时刻的无限多个影像叠加而成的。对上式进行傅立叶变换:
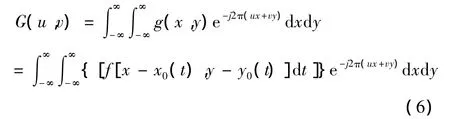
对积分项函数f[x-x0(t),y-y0(t)]dt]利用傅立叶变换的位移性进行置换,得




假设当前图像f(x,y)只在x方向以给定的速度做匀速直线运动,则有:
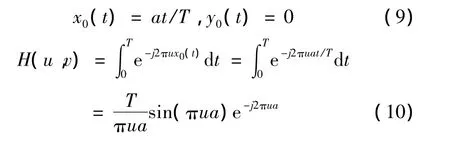
如允许y分量也变换,按y0(t)=bt/T运动,则退化函数变为[3]

如果相机的参数已知,可以通过相机参数和物体的运动参数直接计算出图像的运动模糊参数。基本思想是:在图像序列中通过跟踪运动物体,获得物体在序列图像中的运动参数,再结合已知的相机运动参数,从而确定出运动模糊的点扩散函数,实现模糊图像复原。
设运动物体在前一帧中的位置为(x1,y1),在当前帧中的位置为(x2,y2),则物体的运动方向的角度正切值为:

设序列图像的帧频为FPS,并且假设在两帧之间物体进行匀速直线运动,则物体的运动速度为

设t为积分时间,则物体的模糊尺度为

通过运动模糊的方向θ和运动模糊的尺度Length即可确定运动模糊的点扩散函数Length。
3 Wiener滤波复原法
逆滤波的方法是直接将退化过程H的逆变换与退化图像进行反卷积。利用傅里叶变换卷积特性,上述过程可以图3表示。
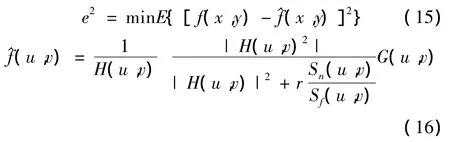
当r=1时,为标准维纳滤波器,否则为含参维纳滤波器。若没有噪声时,即Sn(u,v)=0,维纳滤波器则退化成理想逆滤波器。实际应用中必须调节r以满足上式。因为Sn(u,v)和Sf(u,v)实际很难求得,因此,可以用一个比值k代替两者之比,从而得到简化的维纳滤波公式[5]:

可以用循环迭代法对k值进行自动估计,其基本过程如下:选取一个参数搜索范围,包括初始值k0,Δk和步数km,然后循环计算每一个k值对应的回复误差:

循环结束后,以k值为横坐标,灰度误差E为纵坐标,作出E-K曲线,根据曲线寻找最小恢复误差E所对应的k值,即为k的最佳估计值。
4 运动图像复原实验验证
实验中,对相机进行不同速度移动下的拍摄操作,然后进行运动模糊图像的复原。为验证运动模糊图像的复原功能,需要对复原图像进行评价,常见的方法分为有参考质量评价和无参考质量评价。有参考质量评价方法有均方误差(MSE)、峰值信噪比(PSNR)等。但由于有参照质量评价方法的参数计算前提都必须以原始图像作为参照,在实际应用中往往无法知道原始图像信息的情况,可用无参考的图像质量评价方法。这里采用灰度平均梯度值方法(Gray Mean Grads,GMG)进行评价。
灰度平均梯度值方法是分别将图像长度和宽度方向上的相邻像素灰度值做差后求平方和,再求均方根值,它能较好地反映图像的对比度和纹理变化特征,其值越大表示图像越清晰,图像质量越好。其表达式为

对待测工件进行拍摄时,使相机按照不同的运动规律进行移动拍摄,对摄得的图像进行复原操作并进行复原图像的评价。表1列出了不同移动参数下图像模糊效果、复原效果以及评价指标。
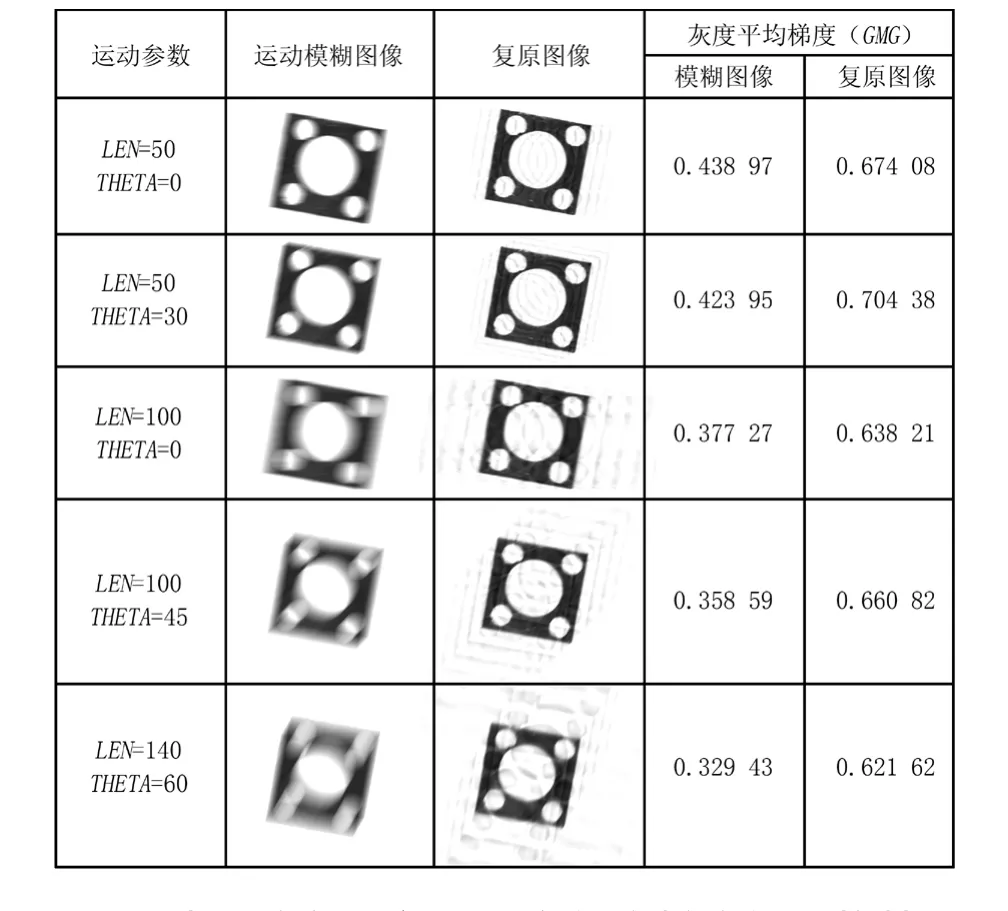
表1 运动图像复原效果比较
图4为图像复原前后平均灰度梯度的变换情况比较柱状图。
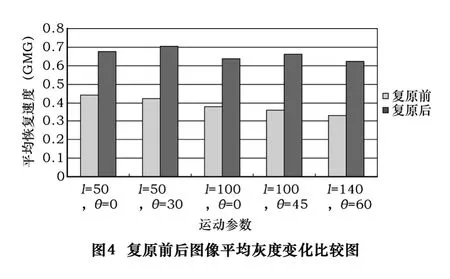
显然,运动模糊图像很大程度上得到了复原改善,复原后图像的平均灰度梯度比复原前显著增加。
5 结语
针对图像拍摄过程中存在的相机扰动以及由于流水线检测时零件运动引起的运动图像模糊,研究了图像退化模型以及复原策略,并采用维纳滤波方法对图像进行了复原试验,最后通过灰度平均梯度值方法对复原图像进行了评价。后续研究后把重点放在改善复原图像的振铃效应等。
[1]周虎,杨建国,陈栋梁.一种超视场零件影像测量仪的研制[J].制造技术与机床,2011(1):104-108.
[2]夏德深,傅德胜.计算机图像处理及应用[M].南京:东南大学出版社,2004.
[3]杨帆.数字图像处理与分析[M].北京:北京航空航天大学出版社,2010.
[4]Mahmood,Abdul Majeed A.Optimized and iterative wiener filter for image restoration[J].2009 6thInternational Sysmosium on Mechatronics and its Applications,2009,26(6):1 -6.
[5]冈萨雷斯.数字图像处理[M].北京:电子工业出版社,2007.
猜你喜欢
农业工程学报(2022年14期)2022-10-19
疯狂英语·新悦读(2022年8期)2022-09-20
陶瓷学报(2020年6期)2021-01-26
紫禁城(2020年8期)2020-09-09
舰船电子对抗(2019年4期)2019-09-10
太原科技大学学报(2019年3期)2019-08-05
哈尔滨理工大学学报(2018年6期)2018-02-13
数码世界(2017年12期)2017-12-28
计算机应用与软件(2017年3期)2017-04-14
计算机应用(2016年12期)2017-01-13
