
几种简单的齿槽转矩测量方法
2012-10-23 10:04冯兆冰吴孔圣丁云飞韩贵春王庆朋
制造技术与机床 2012年5期
冯兆冰 吴孔圣 丁云飞 韩贵春 王庆朋
(大连光洋科技工程有限公司,辽宁大连 116600)
永磁同步电动机三相绕组不通电,且在绕组开路的情况下,用手轻轻转动转子,会感觉到转子上有一定的作用转矩。该转矩在一圈范围内大小不均匀,且可发现若干定位点。在自然状态下转子即定位在这些点,只有在一定的外界转矩作用下,才能改变转子定位的位置。正因为这样,常常把永磁电动机不通电且绕组开路情况下转动转子的转矩称为定位转矩。
定位转矩的产生主要源于定子齿槽的存在。当永磁转子的磁极与定子齿槽的相对位置不同时,主磁路的磁导不一样。永磁转子趋向定位于磁导最大的位置,即稳定平衡点;电磁转矩为零,偏离时都有回复到该位置的作用转矩,或趋于另一相邻的稳定平衡点。可见转矩的作用方向是交变的,通常所说的定位转矩是指交变幅值。由于定位转矩主要源于定子齿槽,所以也被叫做齿槽转矩,或者叫做齿槽定位转矩。
在永磁电动机中,齿槽转矩常常成为引起振动、噪声和提高控制精度困难的基本原因。因此,如何测量齿槽转矩也是受到相当关注的问题。本文介绍几种齿槽转矩的测量方法。
1 杠杆测量法
如图1所示,被测电动机不通电,手动拉动数字测力计,拉到杠杆滑动前瞬间的力的显示值Fmax,乘以力臂长L,就是齿槽转矩幅值(单峰幅值)。
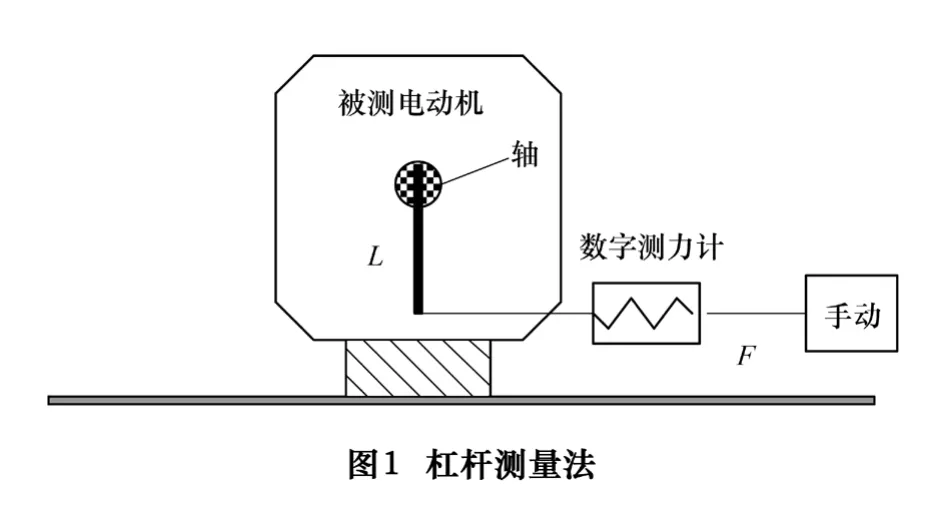
杠杆测量法是一种非常简单、直观、易实现的测量方法,但是精度很难保证,所以常在测量要求精度不高或者条件受限时采用。测量时需注意几点:(1)杠杆垂直向下起始测量(杠杆尽量轻);(2)手拉时,要尽量保持力F与力臂L垂直;(3)手拉要保持缓慢、平稳。
2 使用传感器的动态测量方法
如图2所示,被测电动机通过转矩传感器与制动器(例如磁粉制动器)相连,制动器加载,被测电动机稳速运转,从转矩测试仪直接测量转矩瞬时值(图3),在测得的转矩值中求得齿槽转矩值。

这种测量方法测得的转矩包含了被测电动机自身的齿槽转矩、控制器控制引起的脉动转矩(闭环控制运行条件下情况更为复杂)和负载引起的脉动转矩。所以为了能得到最接近真实的齿槽转矩,测试时需注意几点:(1)要求负载自身的脉动转矩要小(建议采用磁粉制动器);(2)要求传感器系统的采样速率要高(建议3 k以上),能实现动态转矩测量;(3)要求转矩检测仪器能够进行数据处理。
3 使用步进电动机的静态测量方法
如图4和图5所示,将步进电动机、转矩传感器和被测电动机固连在同一轴线上,通过控制脉冲数使步进电动机精确地将样机转子旋转一定角度后,步进电动机利用自身的保持转矩作为转矩传感器的一个固定端,这样齿槽转矩就作用在转矩传感器上,从测试仪可以直接读出齿槽转矩。
测量过程中还应该注意几点:(1)由于大多数电动机的齿槽转矩都比较小,为提高转矩传感器的测试精度,可以在被测电动机侧增加一偏置重物,提高测试质量;(2)针对齿槽较多的被测电动机,步进电动机的步数应该足够多;(3)为避免引入步进电动机运转的波动,步数之间的间隔时间应该足够长。


4 结语
齿槽转矩的测量方法多样,测试条件也相差很大,本文只介绍了几种简单易行的方法,所以使用本文所介绍的测量方法时,要保证测量条件,否则很难得到准确的测量值。
[1]张志忠.无刷直流电动机系统波动力矩补偿的研究[D].哈尔滨:哈尔滨工业大学,1997.
[2]孙力,杨贵杰,等.永磁正弦无刷直流电动机力矩波动的测量[J].中国电机工程学报,2000,20(5):19 -22.
[3]童良忠,陆永平.无刷直流电动机静态力矩脉动测试[J].微电机,1992,25(3):41 -43.
[4]张志忠,漆亚梅,等.无刷直流电动机的波动力矩测量方法[J].微电机,1997,30(1):36 -39.
[5]朱宏伟,邹继斌.平衡式永磁同步电动机力矩波动直接测试系统的动态特性研究[J].电工技术学报,2007,22(7):160 -164.
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2021年5期)2021-11-04
上海大中型电机(2021年2期)2021-07-21
燃气涡轮试验与研究(2020年2期)2020-06-20
组合机床与自动化加工技术(2019年10期)2019-10-31
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
浙江大学学报(工学版)(2015年1期)2015-03-01
汽车与新动力(2015年1期)2015-02-27
航天器工程(2014年5期)2014-03-11
