
干舷高度影响筒型基础平台拖航试验研究
2012-09-26 12:28丁红岩刘宪庆刁景华
船舶力学 2012年5期
丁红岩 , 刘宪庆 , 刁景华
(1天津大学 水利工程仿真与安全国家重点实验室,天津 200072;2天津大学建筑工程学院,天津 300072;3滨海土木工程结构与安全教育部重点实验室(天津大学),天津 300072;4海军工程大学(天津校区),天津 300450)
1 引 言
目前,在海洋油气开发的过程中,开发的主体设备是海洋平台和浮式采油结构物。筒型基础是一种新型的采油平台基础形式,该结构是一种上端封闭、下端开口的筒形结构[1]。该结构的优势主要体现在灵活的安装运输形式和可重复利用性。相对于传统的导管架桩基础形式,在浅海区水深不足,大型施工机械无法通过运输船进入施工海域时,筒型基础可以在场地组装,待其下水后,对其充气,依靠其浮力,用拖轮将其拖到指定的施工地点,通过放气自沉完成沉放施工[2];其可重复利用性大大降低了工程成本,特别适合于我国渤海及北部湾海域边际油田的开发。在筒型基础拖航入海的过程中,筒型基础的气浮稳性是平台运动过程中必须要考虑的首要因素。拖点位置、重心高度、浮心高度都是影响结构稳性的主要因子。
现在,国内外对气浮结构研究比较少,已有研究主要针对结构的静稳性的分析[3-5],对于筒型基础在波浪作用下的运动以及拖航研究非常少,对干舷高度的选择还缺乏试验依据,高的干舷使结构中心位置升高,降低结构的初稳性,低的干舷,将导致结构的抗浪性能和抗沉性能不足,并且导致结构拖航阻力的增大,所以对结构干舷高度的选取是拖航中必须要考虑的一个重要因素[6]。本文通过模型试验分析结构的方法,通过在结构上设置压力、拉力和加速度传感器采集数据,分析筒型基础不同干舷高度对结构整体性能的影响[7]。
2 试验部分
本次试验以吸力锚抢修平台为原型,采用1:20比例模型(原型平台筒直径6.0 m、筒高7.0 m、平台整体高度22 m)。模型为钢质结构。试验模型按重力和惯性力傅汝德相似定律进行相似比尺设计,为使平台模型的重量分布与平台原型相应地缩小,试验模型与原型满足总重量、重心位置以及惯性矩相似。根据平台的重量分布,模型配有一定重量的压载以模拟平台上的设备重量。表1和表2分别表示模型主要尺寸和平台结构的浮稳性参数,图1为试验的模型图,图2为模型入水图。

图1 1:20模型Fig.1 Model 1:20

图2 拖航模型入水Fig.2 Model of towing in water
2.1 试验模型相似律
模型试验中采用的相似理论公式[8]如下:


式中:l、b和h分别为模型或原型的长、宽和高,下标m和p分别表示模型和原型。

表1 筒型基础平台结构参数Tab.1 Parameters of bucket foundation platform
2.2 试验场地及仪器设备
(1)试验在中交天津港湾工程研究院的水槽内进行,水槽长98 m,宽4 m,高2 m。水池尺寸以及平台结构的布置满足《波浪模型试验规程》[9],试验水池设有造波机,可以制造出规则波浪和随机波浪。
(2)拖航设备:拖车,可以控制拖航速度以及拖航距离;拖缆一端系于筒体上,另一端通过固定于拖车上的距水面10 cm高的定滑轮与拉力传感器相连,拖缆采用钢缆。
(3)测量设备:包括水压力传感器,气压力传感器、水压力传感器、拉力传感器、加速度传感器、摄像系统、波浪率定系统、水温计、以及相应的信号放大器和计算机信息采集系统。

表2 原型结构浮稳性参数Tab.2 Parameters of prototype floating stability
2.3 传感器布置
在试验中,采用拉力、压力(包括气压力和水压力传感器)和加速度传感器,拉力传感器固定于拖车上,拖缆经过滑轮将结构模型与拉力传感器连接;气压力传感器布置在筒内顶部,水压力传感器布置于筒底,加速度传感器固定于平台顶部中间位置。传感器布置如图3所示,筒体编号见图4。

图3 结构立面及传感器布置图Fig.3 Vertical structure and layout of sensors

图4 筒体编号图Fig.4 Number of cylinders
2.4 测试组合布置方案
为了只考虑干舷高度影响对拖航的影响,所以在保证拖航速度、波浪条件和拖点位置一致的条件下,取只改变干舷高度单一因素的组合方案。参照渤海水域的波浪资料设波浪参数为:波高1.0 m,周期6 s的规则波,模型试验取波高为5 cm,周期为1.34 s的规则波。拖航速度为2 Kn,体现在模型上为24 cm/s,1、3筒在前为系缆筒,2、4筒在后为非系缆筒,水深为10 m,体现在模型上为50 cm。
由于模型的入水后的自然干舷为8.0 cm,取模型拖航的干舷高度分别为7.5 cm,5 cm和2.5 cm,对应于原型的干舷高度为1.5 m,1 m和0.5 m,平台的初始倾斜角度为0°,具体的拖航组合见表3。

表3 顺浪/逆浪模型拖航组合表Tab.3 Combinations of towing in following and head waves
3 测试结果分析
3.1 顺浪拖航
此次试验采用计算机信息采集系统采集数据,实验数据采用ORIGIN低通滤波处理,为了比较好地分析干舷高度的影响,取拖航稳定阶段的测量参数曲线。图5~6为顺浪拖航情况下干舷高度变化时,拖航方向加速度和拖缆力的时程变化曲线,表现为脉冲变化;图7为顺浪拖航下各测试参数1/3实测峰值随干舷变化曲线。
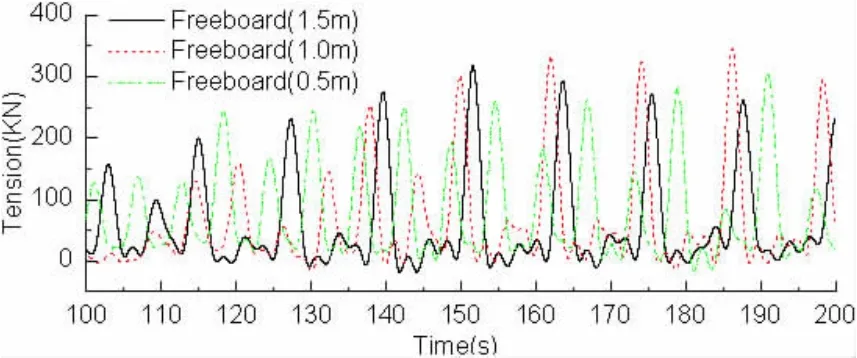
图5 顺浪拖缆力时程变化曲线Fig.5 Time curve of tension in following wave

图6 顺浪加速度时程变化曲线Fig.6 Time curve of acceleration in following wave

图7 顺浪0.5-1.5 m干舷高度测试参数变化曲线Fig.7 Curves of test index with freeboard 0.5-1.5 m in following wave
在顺浪拖航过程中,由图7(a)可以看出,拖航过程中加速度的变化可以分为两个阶段:由于原型结构拖航的系缆点在距筒顶0.8 m处,第一阶段为干舷高度(0.5~1.0 m)低于系缆点,可称之为后倾拖航;第二阶段为干舷高度(1.0~1.5 m)高于系缆点的位置,可称之为前倾拖航。
在后倾拖航阶段,在三个方向上的加速度呈增加趋势,增幅分别为66%、106%和76%,并且在X方向(纵荡)和Z方向(垂荡)的加速度明显大于Y方向(横荡)上的幅值,并且都在干舷高度为1.0 m处取得幅值;在前倾拖航阶段,随着干舷升高,三个方向上加速度呈线性递减的趋势,在Z方向有最大降幅为43%;从图7(b)和(c)可以看出,在后倾拖航阶段,系缆筒即1#和3#筒的气压幅值明显小于2#和4#筒的幅值,也间接地证明了在干舷低于系缆点时为后倾拖航,气压力变化幅值最大发生在4#筒,增加了2.7 kPa,在前倾拖航阶段,筒内气压变化剧烈,最大的气压变化也是发生在4#筒内,最大变化幅值为3.6 kPa,无论是前倾还是后倾拖航,筒底水压的变化都是随着干舷的增加而递减的,并且系缆筒的幅值也是小于非系缆筒的幅值。
从图9可以看出,拖缆力在顶浪拖航的过程中,拖缆力呈现脉冲变化,这是因为,在拖车速度恒定且不大的情况下,开始结构速度小于拖车,当拖缆被拉直时结构受到拖缆拉力,瞬时值将比较大,这样结构会有一个较大的瞬时加速度,结构速度将超过拖车速度,拖缆恢复到松弛状态,没有拉力,而且由于阻力作用结构此后将减速,当速度减到小于拖车速度后,拖缆又被拉直,进而又对结构作用一个瞬时力,所以结构将以脉冲形式作用的;从图7(c)可以看出,拖缆力随着干舷高度从0.5~1.5 m变化,也呈现和加速度相同的变化趋势,后倾拖航的拖缆力明显大于前倾拖航的拖缆力,这与实际情况是相符合的。
3.2 逆浪拖航
图8~10为逆浪拖航情况下干舷高度变化时,拖航方向加速度和拖缆力的时程变化曲线。
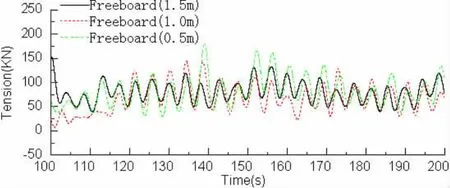
图8 逆浪拖缆力时程变化曲线Fig.8 Time curve of tension in head wave

图9 逆浪加速度时程变化曲线Fig.9 Time curve of acceleration in head wave

图10 逆浪0.5-1.5 m干舷高度测试参数变化曲线Fig.10 Curves of test index with freeboard 0.5-1.5 m in head wave
相比于顺浪拖航,逆浪拖航的气压/水压和加速度变化明显地相对稳定,这说明逆浪状态下拖航波浪能够平稳地作用在结构上。从图10(a)可以看出,在逆浪拖航过程中,后倾拖航阶段,在X方向上和Y方向上的加速度变化呈增大趋势,两者的升幅分别为28%和16%,干舷的增加对横荡方向的影响较小;在前倾拖航阶段,X方向变化幅度很平缓,而Y方向变化幅度横荡明显,降幅为3%,而在干舷高度从0.5 m增加到1.5 m的过程中,垂荡方向加速度保持稳定状态,受到干舷的变化影响不大,还可以得到,在横荡方向上的加速度幅值明显大于其余两个方向上的幅值,说明在拖航中,筒在Y方向上的漂移明显。从图10(b)和(c)可以看出,在后倾逆浪拖航中,筒内气压力和筒底水压力的变化明显地小于前倾拖航的变化,这与顺浪拖航的结果是相同的;从图12可以看出,逆浪拖航过程中,拖缆力变化为三角函数分布,表明在拖航中,拖缆一直处于被拉直状态,随着波浪的变化而变化,而不同于顺浪拖航的脉冲式变化;从图10(d)的逆浪拖缆力的变化可以看出,随着干舷高度从0.5~1.5 m变化,后倾拖航时随着干舷增大拖缆力降低,前倾拖航时随着干舷增大而增加,这是因为逆浪后倾拖航中,干舷越低,吃水越大,迎浪面积小;在前倾拖航中,干舷越高,迎浪面积越大,所以拖缆力成增大趋势。
3.3 顺浪拖航与逆浪拖航比较分析
对比分析顺浪拖航和逆浪拖航两种情况,干舷高度和系缆点的位置的关系影响对拖航的影响是必须重视的。
干舷高度低于系缆点时,对加速度而言,随着干舷的增加,三个方向加速度呈增加趋势,X方向最大增幅为66%,Y方向加速度最大增幅为106%,Z方向加速度幅值可增加76%,三个方向的最大增幅都发生在顺浪拖航阶段;对于拖缆力而言,顺浪拖航中,拖缆力是随着干舷增加而增加的,逆浪拖航时,拖缆力是随着干舷的增加而减小的,这是因为顺浪中,后倾拖航使得受波面积增加,逆浪时,后倾拖航使得受波面积降低。
干舷高度高于系缆点时,对加速度而言,随着干舷的增大,都呈下降的趋势变化,X方向、Y方向和Z方向的最大降幅分别为34%、37%和37%,且都发生在顺浪拖航阶段;对于拖缆力而言,顺浪拖航随着干舷的增加拖缆力增加,逆浪拖航随着干舷的增加拖缆力降低,这是因为顺浪中,前倾拖航使得受波面积减小,波浪力降低,逆浪时,前倾拖航使得受波面积降低。
4 结 论
本文通过模型试验对顺浪、逆浪时筒型基础随着干舷高度变化的各个测量参数进行了分析,得到如下结论:
(1)在波浪不大,航速稳定,干舷高度不小于0.5 m的情况下,结构在拖航过程中不发生漏气和倾倒现象,说明拖航是安全的,结构能够满足拖航要求;
(2)干舷高度的选择受到系缆点位置、筒内气塞高度和水塞高度的影响,在干舷高度高于系缆点位置的前提下,干舷高度不能大于平台的自然入水干舷高度,考虑必须有一定的水塞高度,对于该平台取干舷为1.0 m进行拖航;
(3)无论是顺浪拖航还是逆浪拖航,后倾拖航的稳定性和耐波性明显优于前倾拖航,在后倾拖航中水压力和气压力的变化幅度都是较小的,在前倾拖航中水压力和气压力变化幅度较大;
(4)拖缆力在顺浪和逆浪拖航中由于波浪作用方式的改变,呈现不同的时程变化趋势,顺浪拖航为脉冲变化,逆浪拖航为三角函数形式变化。
[1]丁红岩,刘振勇,陈 兴.吸力锚土塞在粉质粘土中形成的模型试验研究[J].岩土工程学报,2001,23(4):441-444.
[2]丁红岩,刘建辉,张浦阳,等.筒型基础平台模型拖航试验研究报告[R].天津:天津大学,2006:101-130.
[3]别社安,时忠民,王翎羽.气浮结构的静浮态分析[J].中国港湾建设,2000(6):18-23.
[4]别社安,时忠民,王翎羽.气浮结构的小倾角浮稳性分析[J].中国港湾建设,2001(1):31-35.
[5]别社安,时忠民,王翎羽.气浮结构的运动特性研究[J].中国港湾建设,2001(2):18-21.
[6]盛振邦.船舶静力学[M].上海:上海交通大学出版社,1992.
[7]Hua Jianbo.Assessment of the course-keeping ability of a fast ship in following waves[J].Journal of Ship Mechanics,2004,8(6):1-12.
[8]李忠献.工程结构试验理论与技术[M].天津:天津大学出版社,2004.
[9]中华人民共和国交通部.JTJ/T 234-2001波浪模型试验规程[S].北京:人民交通出版社,2002.
猜你喜欢
当代水产(2022年6期)2022-06-29
水道港口(2022年1期)2022-05-18
世界海运(2021年9期)2021-10-08
兵工学报(2019年7期)2019-08-28
汽车观察(2018年12期)2018-12-26
船海工程(2018年5期)2018-11-01
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
船海工程(2018年1期)2018-03-01
船海工程(2014年4期)2014-06-27
