基于灰色BP神经网络的质心数据处理方法
2012-09-08 07:58赵章风
中国机械工程 2012年4期
张 宪 钟 江 吴 晖 赵章风
浙江工业大学,杭州,310014
0 引言
发展山区丘陵农业机械化的关键之一在于选择适宜于山区丘陵作业的体积小、重量轻、性能高的农业机械[1-2]。小型农业作业机作为山区丘陵地带农业作业的主力机具,其质心高度参数和其他位置参数将直接影响整机对作业环境的适应性能、整机的动力性能、作业和行驶的稳定性、侧翻安全性以及加速时的动态响应等。因此,质心位置的确定在小型作业机的整机设计中具有举足轻重的地位,也是小型农业作业机整机设计的关键。
1 三点支撑质心位置测试系统的测试原理
质心位置参数一般需要通过质心测试系统试验获得。本文基于三点支撑质心位置测试系统来测试质心高度[3]。其原理如图1所示。三个支点呈等腰三角形布置,每个支点上设置一个称重传感器,底边两个支点通过球关节与平台上表面连接。测试时,顶端支点在伺服电机的驱动下做上下运动,通过称重传感器读取三个支点处的数据,经计算得到被测物体的质心位置参数。
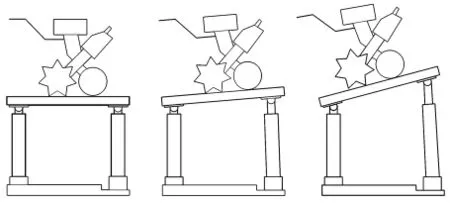
图1 三点支撑质心位置测试系统测试过程示意图
通过理论研究可知[3]:顶端支点升降,测试平台与水平面形成一个倾斜角。质心高度坐标测试的精度随倾斜角的增大而提高。
由于在测试过程中,倾斜角度大于被测小型作业机和测试平台之间的摩擦角,故被测小型作业机将产生滑移,较为危险;同时,测试系统存在随机误差和系统误差,为获得较高精度的质心高度数据,需要进行大量的重复测试。在保证测试精度的前提下,为提高测试效率,本文构建一种具有较高精度的质心高度预测模型,通过有限次小角度测试获得的数据,可以预测得到较高精度的质心高度参数。
2 质心高度预测模型的构建流程
质心高度预测模型的构建受到两方面的约束:一是不可能包括所有因素;二是很难确定通过测试获取的含有误差的参数之间的精确关系[4-5]。采用两种或多种预测模型构建技术的组合,可以尽可能多地利用测试获得的数据中所包含的有效信息。
由理论研究可知[3]:质心高度相对误差曲线为指数曲线,其通式为

式中,y为质心高度相对误差;x为三点支撑质心位置测试系统中产生平台倾斜的升降杆位移;a、b为系数。
由式(1)可以看出,平台的倾斜角度与测试数据的平均值亦呈指数曲线分布。由于灰色系统理论对于构建指数型的模型具有独特的优势,同时它具有“贫信息”、建模简单的优点,因此本文采用灰色系统理论进行质心位置预测模型的构建。但是,灰色系统理论还存在缺乏自学习能力、自组织能力和自适应能力,对非线性信息的处理能力较弱,且不能包括所有影响因素等缺陷。BP神经网络技术具有“大样本”、非线性处理能力及学习能力强、能够快速收敛等特征。根据灰色系统理论中灰数的定义可知,BP神经网络的输出实际上是灰数,即BP神经网络包含灰色内容,可以用灰色系统理论对其进行考察,反之用BP神经网络技术来研究灰色系统也是可行的[6-8]。由于灰色系统理论与BP神经网络技术具有上述特点,所以,将灰色系统理论与BP神经网络进行有机的结合,构建基于灰色BP神经网络技术的质心位置预测模型是可行的。
基于灰色系统理论,可以在“贫信息”条件下建模,但由于“贫信息”和系统非线性信息处理能力较弱的缺陷,使得所建模型误差较大,虽然可以通过对初始值和背景值的改进来提高精度[9],但在实际应用中,采用灰色模型直接预测所得数据的真实性值得商榷。而采用BP神经网络技术,基于在试验范围内灰色模型计算出的数据,对质心位置进行进一步的预测,可以很好地弥补上述不足。
将灰色模型与BP神经网络在模型中按串联方式结合[10],即将灰色模型的输出作为BP神经网络的输入,则质心位置预测模型构建流程如图2所示。图2中,ξ1、ξ2分别为基于GM(1,1)灰色模型和基于BP神经网络模型的拟合精度;δ1、δ2分别为第一级GM(1,1)灰色模型和第二级BP神经网络模型的设定精度。

图2 数据预测模型构建流程图
在质心位置预测模型的构建中,将已知重量和质心位置的标准试样在测试系统上进行有限次、小角度测试,对所得原始数据进行预处理,剔除坏值,以减小粗大误差对预测精度的影响。然后基于灰色系统理论,采用GM(1,1)灰色模型进行第一级质心位置预测模型的构建。该模型的构建,本质上是采用灰色模型对原始数据进行拟合,拟合精度将决定该模型对质心位置预测的精度。在该模型构建过程中,需要将预测结果与已知试样的质心位置进行对比,通过修改模型初始值和背景值来提高模型的拟合精度。当基于灰色系统理论获得的第一级预测模型达到设定的精度后,基于该模型预测的数据以及影响测试精度的主要因素——倾斜角,构建第二级基于BP神经网络技术的质心位置预测模型,通过对网络参数的修正和训练,使其预测结果达到规定的精度,至此,质心高度预测模型构建完成。
3 试验平台的搭建与试验数据
3.1 试验平台的搭建
小型三点支撑质心位置测试系统方案如图3和图4所示,主要由机械系统和控制系统组成。机械系统包括测试平台、底座、升降推杆、称重传感器、位移传感器和球铰等,其中顶端支点可在较大范围内上下升降,以调整测试平台的倾斜角;控制系统包括计算机、数据采集卡等。系统所采用的称重传感器和位移传感器的性能参数见表1和表2。

图3 测试系统总体方案
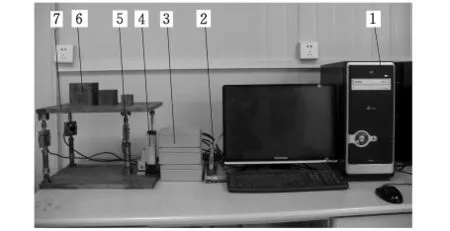
图4 验证用试验台
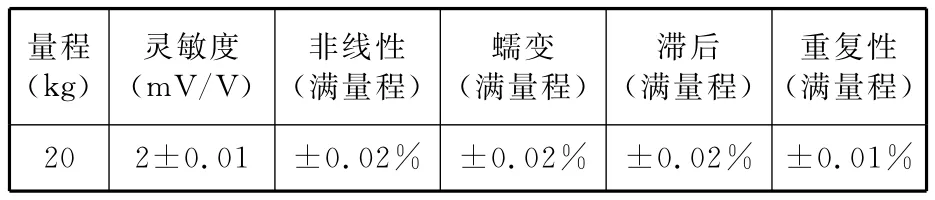
表1 称重传感器参数表

表2 位移传感器参数表
在试验过程中,首先调整三个支点的高度,将测试平台调整成水平状态;之后放上标准试样,调整顶端支点的高度,使测试平台与水平面成某一倾斜角,并读取三个称重传感器和位移传感器的测量值,代入质心计算公式[3],可得到标准试样质心位置的测试值。
3.2 试验数据
本次试验已知标准试样的质心高度为45mm。考虑到在小型作业机质心位置的实际测试中,质心测试平台的倾斜角度不能太大,故在试验中选取与实际测试相近的倾斜角(5°~8°),测试时,每隔0.2°进行一次数据采集,从5°到8°和从8°到5°来回各测5次并取其平均值,代入质心位置计算公式,计算出的标准试样的质心高度测试数据和理论高度的相对误差见表3中“测试数据”一栏。
从表3中可以看出,由于测试次数较少,数据具有一定的离散性,同时,当角度较小时,其相对误差较大;随着测试角度的增大,相对误差变小。
4 质心高度预测模型的构建与预测
4.1 基于灰色系统理论的灰色模型的建立
根据灰色系统理论,有如下预测模型(GM(1,1)灰色模型):

将表3的测试数据代入式(2),可以获得基于灰色系统理论的初步质心位置预测模型:

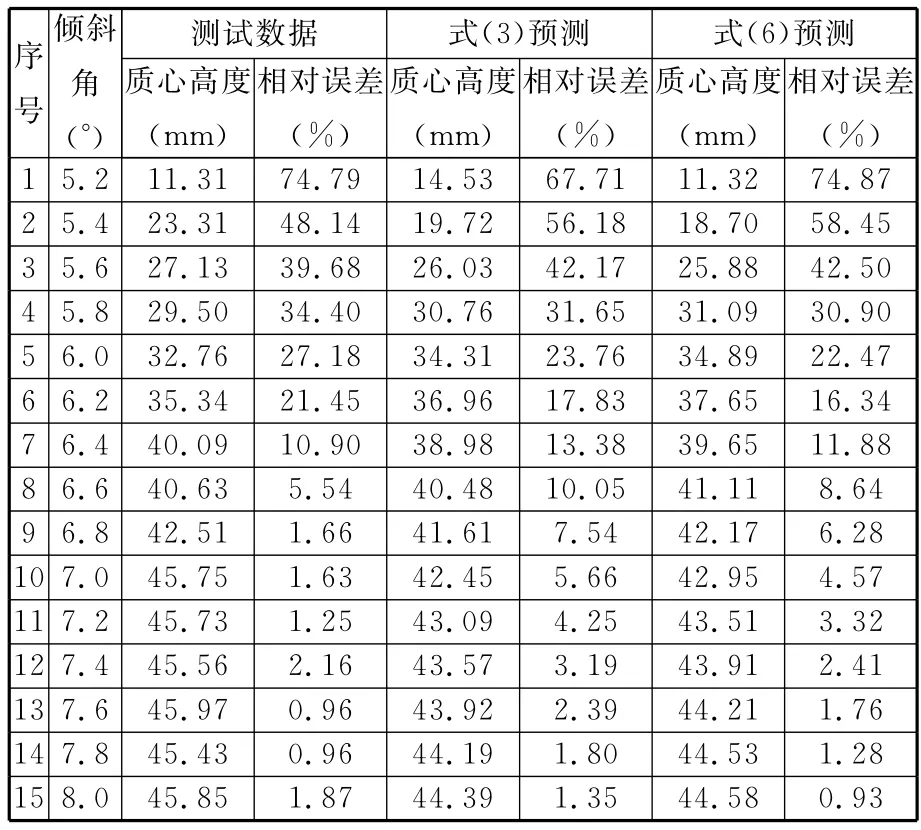
表3 测试数据和改进前后灰色模型预测数据对比
从表3中“式(3)预测”一栏中可以看出,预测模型式(3)与测试数据拟合不是很理想,尤其是在测试角度较大的部分,根据理论与仿真分析所获得的测试角度越大则测试精度越高的结论,需要对式(3)进行修正,以提高测试数据在大角度位置的拟合程度。
GM(1,1)灰色模型的构建过程就是对测试数据的曲线拟合过程,由于测试系统随机误差的存在,测试次数较少,数据的离散性使得拟合曲线不可能通过X(1)序列的任何一个点;同时,在GM(1,1)模型中,采用梯形公式求出定积分的近似值作为背景值z(1)(k+1),梯形公式存在的误差将导致模型预测的偏差。利用最小二乘法对初始值(1)和背景值z(1)(k+1)进行改进,将有利于模型精度的提高,即
改进后的模型为

式(6)为基于灰色系统理论的第一级质心位置预测模型,将测试数据代入式(6),计算出当倾斜角为8°时,质心高度为44.58mm,与标准试样的质心高度相对误差为0.93%,其精度高于式(3)预测的结果,同时也满足对第一级预测模型的要求。
从表3可看出改进前后的第一级预测模型与测试数据的拟合程度,改进后的第一级预测模型与原始数据有更为合理的拟合。
4.2 基于BP神经网络技术的预测模型的建立
根据第一级预测模型可知,在采用三点支撑测试系统进行质心位置测试时,倾斜角越大,测试精度越高。但为了安全起见,一般倾斜角都不大于8°。为进一步提高质心位置预测精度,拟构建以测试角度和第一级预测模型(式(6))的输出值为输入元素的基于BP神经网络的第二级质心位置预测模型。
预测方案:将表3中“式(6)预测”一栏中的前10组数据与相应的测试角度用于神经网络的训练。将每5个角度的质心高度数据以及其相应的测试角度作为输入向量,输出向量为输入向量之后的质心高度数据;将表3中“式(6)预测”一栏中的最后5组数据作为测试数据来验证神经网络的预测精度。当网络预测精度达到理想值后,再利用这5组数据进行测试平台倾斜角大于8°的质心高度参数预测,直到相对误差收敛为止。
根据预测方案,网络的输入向量共10个(5个角度和5个质心位置),目标向量为第6个角度参数时的质心位置值;由于一般预测问题都可以通过单隐层的BP神经网络实现,根据Kolmogorov定理,确定隐含层神经元数为21个,所构建的BP神经网络预测模型为10×21×1系统,其中隐含层的神经元传递函数采用S型正切函数Tansig,输出层神经元传递函数采用S型对数函数Logsig。在进行参数输入前,需对输入元素进行归一化处理,同样在完成计算后,所获得的数据也需进行反归一化处理。
用MATLAB编写BP神经网络程序,并将归一化后的用于训练的数据输入网络。设定的网络训练函数为Trainlm,采用Levenberg-Marquardt算法进行网络学习。训练次数为1000,训练精度为0.001,训练结果如图5所示。
将表3中“式(6)预测”一栏中的6~14组数据归一化后输入网络,其预测结果和表3中“式(6)预测”一栏中的11~15组数据进行验证,结果如图6所示,最大误差为0.66%,满足预测要求。
4.3 质心高度预测与结果分析

图5 训练结果

图6 验证误差
将表3中“式(6)预测”一栏中的11~15组数据归一化后,输入上述已经完成训练的网络,通过预测得出第16组数据,再将表3中“式(6)预测”一栏中的12~15组数据和预测得出的第16组数据一并归一化后输入网络,得出第17组数据,依次循环,直至相对精度收敛为止。预测得到的倾侧角度与相对误差的关系见表4,由表4可知数据在10.4°开始收敛,对应的预测质心高度为44.659mm,与标准试样的相对误差为0.759%,满足测试要求。

表4 灰色神经网络质心预测值的相对误差
5 结语
本文对采用三点支撑质心位置测试系统测量小型作业机质心高度的数据处理方法进行了研究。为解决测试系统中传感器随机误差导致测试数据较大偏离、测试精度降低的难题,结合理论研究和仿真分析的结果,基于灰色BP神经网络技术,研究了采用GM(1,1)模型与BP神经网络联合构建质心高度数据预测模型的方法,并在小型验证试验台上进行验证。结果证明,根据所建立的预测模型在有限次、小角度条件下,对质心高度测试获得的数据进行处理可以获得较高精度的质心高度数据。本文所研究的理论和建模方法可以为小型作业机质心测量系统的高效率、高精度和高安全性的测量提供保证,同样也可用于大型拖拉机、汽车、航空和航天等其他领域中的各种物体质心高度的测量,同时也为各种智能化测试系统提供了一种减小传感器随机误差对测试精度影响的数据处理方法。
[1]蒋建东,张立彬,胥芳,等.面向大批量定制生产的小型农业作业机客户需求模型的构建研究[J].农业工程学报,2005,21(9):98-102.
[2]张立彬,叶永伟,蒋建东,等.基于可重构模块化的小型农业作业机方案的设计[J].农业机械学报,2005,36(4):78-81.
[3]钟江,赵章风,乔欣,等.基于三点支撑的质心测量系统及误差分析[J].中国机械工程,2010,21(12):1469-1472.
[4]傅立.灰色系统理论及其应用[M].北京:科学技术文献出版社,1992.
[5]杨建钢.人工神经网络教程[M].杭州:浙江大学出版社,2001.
[6]Fabbri A,Molari G.Static Measurement of the Centre of Gravity Height on Narrow-track Agricultural Tractors[J].Biosystems Engineering,2004,87(3):299-304.
[7]Kolmogrov A N.On the Representation of Continuous Function of Many Variables by Superposition of Continuous Function of One Variable and Addition[J].American Math.Society Trans.,1963,28(1):55-59.
[8]Zhong Luo,Yuan Jingling,Xia Hongxia.A Study on Gray Neural Network Modeling[C]//Proceedings of the First International Conference on Machine Learning and Cybernetics.Bejing:2002,2021-2023.
[9]钟珞,白振刚,夏红霞,等.灰色问题神经网络建模优化及其应用[J].计算机工程与应用,2001,37(8):33-34.
[10]高玮,冯夏庭.基于灰色-进化神经网络的滑坡变形预测研究[J].岩土力学,2004,25(5):514-517.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年4期)2021-11-24
小学生学习指导(低年级)(2020年3期)2020-06-02
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
中国惯性技术学报(2019年6期)2019-03-04
电子制作(2018年11期)2018-08-04
Coco薇(2017年2期)2017-04-25
Coco薇(2017年2期)2017-04-25