
步进电机高速起停控制的DSP实现
2012-08-28 06:49胡家文马文礼黄金龙
电机与控制应用 2012年3期
胡家文, 马文礼, 黄金龙
(1.中国科学院光电技术研究所,四川成都 610209;
2.中国科学院研究生院,北京 100039)
0 引言
步进电机是数字控制系统的重要执行元件,是一种将电脉冲信号转换为角位移或线位移的控制电机。每输入一个脉冲信号,电机就转动一个步距角,其角位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成比例。通过改变脉冲频率的高低,就可以在很大范围内调节电机转速,并能实现快速起动、制动和反转,是一种离散化执行元件,广泛应用于各种自动化数字控制系统中。在实际应用过程中,由于控制不当,易发生起动时振动失步及停止时过冲的现象,导致运行稳定性和定位精度受到影响,在处于负载较大且频繁起停的工况时,这种现象更加明显。本文针对某大快门研制试验的要求,提出了一种基于TMS320LF2407A型DSP速度控制方法,试验证明,该方法满足了快门频繁快速打开和关闭的要求,且响应速度快,定位准确。
1 TMS320LF2407A型DSP简介
随着超大规模集成电路技术的迅速发展,DSP数字信号处理器(Digital Signal Processor,DSP)的性能价格比得到很大提高,使得DSP在电机控制领域的应用愈来愈广泛。TI公司的TMS320LF2407A是TI公司最常用的DSP控制芯片,性价比高,广泛应用于电机控制、数字信号处理等多种领域。它采用高性能静态CMOS技术,使得供电电压降为3.3 V,减少了控制器的功耗;40 MIPS的执行速度使指令周期缩短到25 ns,从而提高了控制器的实时控制能力。两个事件管理器模块EVA和EVB,每个包括:16通道10位A/D转换器;2个16位通用定时器;3个捕获单元;8个16位的脉宽调制(PWM)输出;内置正交编码脉冲(QEP)电路;控制器局域网通信接口(CAN);16位的串行外设(SPI)接口;基于锁相环的时钟发生器;16位的PWM输出通道能够实现:三相反相器控制;PWM的对称和非对称波形;当外部引脚POPINTX出现低电平时快速关闭PWM通道;可编程的PWM死区控制,以防止对上下桥臂同时输出触发脉冲;事件管理器模块适用于控制交流感应电机、无刷直流电机、开关磁阻电机、步进电机、多级电机和逆变器。
本控制系统中使用事件管理器EVA模块的比较单元1,发出频率变化的PWM脉冲信号控制步进电机运转速度,利用I/O控制步进电机转动方向。
2 速度控制
步进电机在工作时将输入的数字脉冲转换成电机轴的输出角度,每个脉冲使转轴转动一个步距角,并依靠电磁力矩将转轴准确地锁定在相应的步距位置上。
步进电机在静态时产生的输出转矩最大,当输入脉冲频率(即电机转速)增加时,电机各相电感在电路接通和断开时,阻止相电流达到稳态值,进而电机转矩下降。步进电机的牵入转矩曲线是指电机在不同负载下,能够直接驱动而不致失步的最大起动频率;牵出转矩曲线是指电机在不同负载下,能够正常工作而不致失步的最大工作频率。在特定负载情况下,步进电机有一个最大起动转速和最大负载转速,如果以超出最大起动转速的速度直接驱动电机,将会造成电机失步,严重时电机不能起动;如果电机以超出最大负载转速的速度运行,则不能驱动负载。
在实际应用过程中,若步进电机在升降速过程中,脉冲频率的变化不合理,就会使电机失步或者过冲,使系统无法做到精确定位;同时,由于系统快速性的要求,电机需要很快地完成加减速过程。故必须提供合理加减速运行曲线,在保持定位精度的前提下,提高系统的运行速度。因此有必要了解步进电机加减速的运行规律,对脉冲频率进行合理性研究。找出最佳脉冲输出方案,使步进电机在运行过程中能达到快速定位,运行步数准确。
对于步进电机来说,如果想得到最快的加、减速过程,就需要在每个频率下输出相应的最大转矩,即电机以最大的加速度来运行,就可以得到最快的加减速曲线。每个频率下的最大输出力矩可以由电机矩频特性曲线得到,但一般的矩频特性曲线是整体呈下降趋势的非线性曲线,不便于计算。因此在一定的频率范围内,用不同的曲线一次、二次甚至高次来拟合其特性。
如图1所示,在频率f1~f2段,随着频率增加输出转矩变化较小,可以认为输出转矩不变,那么加速度不变,故可采用匀加减速控制。在步进电机升速过程中,匀加减速运动使加速度保持一恒定值不变,速度以线性规律上升,如图2所示。该加速快速性较好,控制算法简单。在特定的场合,若是频率只从f1升到f2,则可采用这种方法。若要上升到更高的频率,则需以最高频率对应输出转矩能达到的加速度上升,则整个加速过程较长。
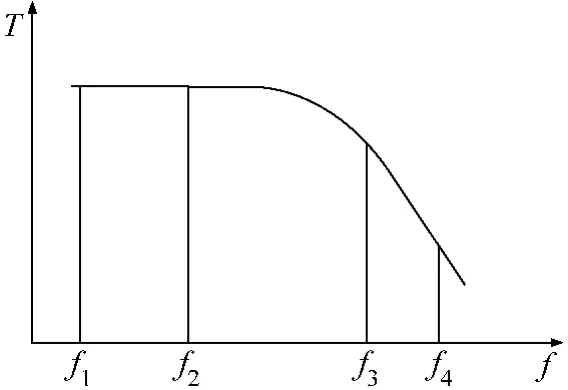
图1 步进电机矩频特性曲线
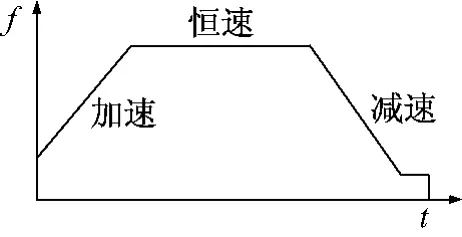
图2 匀加减速曲线
如图1所示,在频率f3~f4段,频率和输出转矩特性成直线关系,故通过拟合得出曲线的频率和时间的关系为f=fm(1-e-t/τ),τ 为决定升速快慢的时间常数,在实际工作中由试验确定。fm为负载转矩下步进电机最高连续运行频率。故在加减速控制过程中,开始加速度最大,且随着速度的升高而逐渐减小,速度上升得越来越慢。当速度上升至最高值时,加速度降低至最小,理想情况下应接近于0,如图3所示。
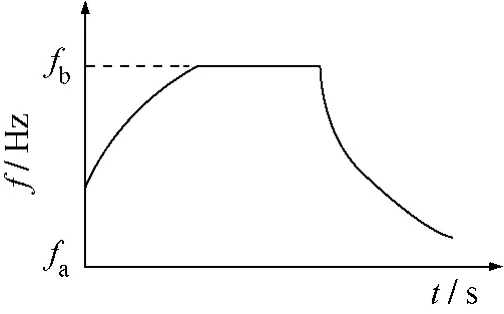
图3 指数型加减速曲线
抛物线型曲线可分段为指数曲线,因此又称为双段指数曲线,如图4所示。该方法具有加加速、加速、减加速、匀速、加减速、减速、减减速等七个运动阶段,实际应用较复杂,计算量较大,主要适用于对加减速平稳性要求较高的场合。

图4 抛物线型加减速曲线
在快门步进电机的运用中,由于快门打开、关闭距离相对较小,直接用起动频率工作无法满足要求,结合对电机的矩频特性曲线进行分析,发现频率上升到f2即可满足要求,故采用匀加减速曲线是最好的选择。用匀加减速曲线编程简单,占用资源少,并且能充分保证步进电机的运行稳定性,同时兼顾了升降运行快速性,本控制系统中的速度控制采用匀加减速控制曲线。

式中:Tm——电机输出转矩最大值;
Tf——总负载转矩;
犀牛是陆地上体重仅次于大象的动物,有“铠甲武士”之称。北白犀是北非白犀牛的简称,2011年被世界自然保护联盟列为极危物种。可时间回溯到五六十年前,北白犀还有2000头左右。短短半个世纪,一个物种就从现实世界走进了历史长河。这个过程是如何上演的?
J——电机转子本身及负载总转动惯量;
θ——电机转子转过的角度。若设步距角为k0,则:

从而有
其中:

在矩频特性曲线上点P1(f1,T1)到点P2(f2,T2),这里T1=T2=Tf+Jβ
从而有

电机转速可由公式给出:

式中:ω(t)——电机转速;
ω0——电机起动速度;
β——角加速度。
若Ti为相邻两个进给脉冲之间的时间间隔,ω0为进给一步后的末速度,β为进给一步的加速度,则有
由此可计算出相邻两个进给脉冲间的频率关系:

其中:
根据式(7),用计算机实施输出脉冲控制时,输出脉冲的频率为离散频率值fi,i=0,1,2,3,…,N。其中,f0可取电机的起动频率,在系统中取1 000 Hz。减速过程为其逆过程。
实际控制过程中,加速阶段,将定时器1配置为连续增计数模式,定时器1周期寄存器内的值就代表脉冲频率。通过在线计算,将各段速度对应的脉冲频率换算为DSP定时器周期寄存器的值,在每次中断处理程序中在线计算下一速度段定时器周期寄存器的装载值,并将其装载入周期寄存器中,重复此过程直到步进电机达到预定的频率。匀速阶段,先计算出匀速的步数,每次中断处理程序中步数减1,直到步数为零。减速阶段,则为加速阶段的逆过程。流程图如图5所示。
3 结语
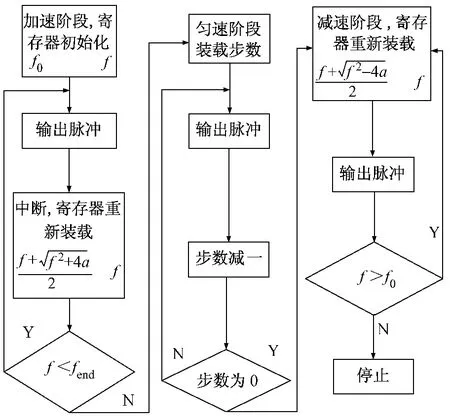
图5 速度控制流程图
步进电机加减速控制技术是步进电机控制中的一项关键技术。步进电机升降速曲线的设计直接影响电机运行的平稳性、升降速的快慢、最高速度、定位精度等,从而决定了系统的综合性能。本文介绍了一种基于TI2407A DSP的步进电机高速起停控制的数字化实现方法,并将其应用于工程实践中。实践证明,该方法简单易行,有效克服了步进电机加减速过程中易出现的失步、堵转等问题,系统定位精度满足用户要求。
[1]张小鸣.DSP控制器原理及应用[M].北京:清华大学出版社,2009.
[2]闫剑虹,何泰祥.步进电机高速启停控制的单片机实现[J].空间电子技术,2009(2):124-127.
[3]黄楚芳,陈鸿.步进电机加减速控制器的设计[J].山西电子技术,2009(1):30-31.
[4]李海波,何雪涛.步进电机升降速的离散控制[J].北京化工大学学报,2003,30(1):92-94.
猜你喜欢
当代水产(2022年6期)2022-06-29
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
四川冶金(2018年1期)2018-09-25
劳动保护(2018年8期)2018-09-12
中成药(2017年12期)2018-01-19
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
