
两相步进电机单极性细分驱动器的实现
2012-08-28 06:49金占雷
电机与控制应用 2012年3期
李 婧, 金占雷
(北京空间机电研究所,北京 100190)
0 引言
步进电机由于其开环控制、无定位累计误差等优点,在卫星遥感器的机构控制中得到广泛应用。但也存在一些问题:(1)传统的双四拍或者四相八拍的工作方式,方波式的绕组电流造成很大的转矩脉动,容易出现低频振荡;(2)随着遥感器成像质量的日益提高,对机构的定位精度也提出越来越高的要求,传统的恒电压驱动、恒电流驱动、调频调压等方式已经无法满足要求。细分驱动方法恰好可以解决这两个问题。设计的意义在于:(1)在不改变电机内部参数的情况下,使步距角减小,即提高分辨率和步距精度。(2)改善低频振荡问题。经过细分后,驱动电流的变化幅度大大减小,转矩均匀连续变化,转子到达平衡位置时的过剩能量也大为减小,且控制信号的频率增大后,可远离转子的低频谐振频率。
目前实现两相步进电机的细分驱动方法大多为双极性驱动。在低速时双极性效率是单极性的两倍,在高速时因双极性驱动方式的电感为单极性的两倍,转矩下降很快[1];且双极性驱动同侧两个驱动管存在短时同时导通的风险,可能造成电源短路,可靠性不高,影响其在遥感器上的应用。
本文针对双极性细分驱动器的以上不足,设计了一种针对两相步进电机的单极性细分驱动器,并以FPGA为核心实现了PWM算法,具有集成度高、灵活性大等特点。该驱动器采用细分控制和通路选择相结合的方法进行电机驱动,不存在电源对地的直接通路,因此可靠性高,可在对可靠性要求较高的航天航空领域广泛应用。
1 双极性细分驱动方法
目前实现细分的驱动器大多为双极性驱动方式。双极性驱动是指绕组线圈中的电流有时沿某一方向流动,有时按相反方向流动。步进电机的双极性驱动电路如图1所示,一般由两个H桥电路构成,每个H桥电路由2片驱动芯片和4个MOSFET管构成。当 VT1,VT4导通时,电流从A→C,VT2,VT3导通时,电流从 C→A,当通电顺序为AC→BD→CA→DB时,电机正转,通电顺序为DB→CA→BD→AC时,电机反转。VT1和VT3,VT2和 VT4,VT5和 VT7,VT6和 VT8不能同时导通,若同时导通,电源对地直通,会烧毁电源或者电路。这阻碍了双极性细分驱动在航天遥感器上的应用。
为了防止电源直通,一般的双极性驱动电路需要加死区保护、逻辑控制或者电流保护电路对电源进行保护。死区出现于控制导通时间小于断开时间,如在 VT1,VT4导通之前,提前把 VT2,VT3断开,防止由于器件的开关延时导致上下桥臂直通;逻辑控制是采用逻辑判断的方法让输入给功率管的控制信号没有同时导通的可能;过流保护是对H桥上的电流进行实时监测,当电流过大时,直接将电源切断,起到保护的目的。但这几种方法的加入无疑都增加了成本,本文将介绍一种单极性驱动方法,避开双极性驱动的这些问题,也能很好地达到细分驱动的效果。

图1 双极性驱动电路示意图
2 单极性细分驱动方法
2.1 细分驱动原理
从两相混合式步进电机的结构特性和工作原理可知,步进电机的驱动是靠给步进电机的各相励磁绕组轮流通以电流,实现步进电机励磁磁场合成方向的变化来使步进电机转动的[2]。细分控制就是把原来的一步再细分成若干份,将原来的方波脉冲电流变为阶梯波电流。本质来讲是通过对步进电机绕组中的电流控制,使电机内部的合成磁场变成连续的旋转磁场。对两相混合式步进电机而言,给在空间彼此相差90°的两相绕组,分别通以相位互差90°的正弦电流(见图2)。

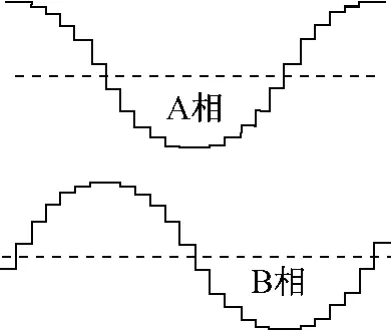
图2 相位互差90°的两相绕组阶梯电流波形
由于两相电流空间位置是正交的,则合成一个以Im为幅值,-α为幅角的矢量。
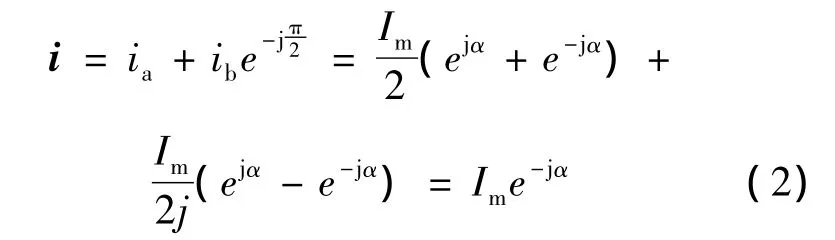
这样,每当α的值发生变化时,则合成的矢量转过一个相应的角度,且幅值大小保持不变,实现了恒力矩、均匀步距角的细分驱动[3],所产生的转矩如图3所示[4]。利用式(1)可得到n细分后,A,B两相的电流数据,量化后记录下来,电机运行时,只要取出与步数对应的电流数据送入控制电路中,即可实现对步进电机相绕组电压的控制,达到细分步距角的目的。
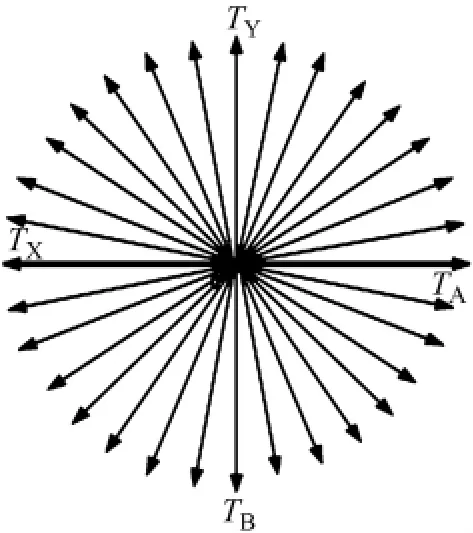
图3 8细分驱动下的转矩矢量图
2.2 单极性细分驱动器设计
若在不细分单极性驱动电路(见图4(a))驱动管的控制端直接输入细分后的电压波形,得到的相电流波形如图4(b)所示。在电压输出为高的区域,电流波形为想要的拟正弦,但是在电压输出为零的区域,期望电流为零,却出现了椭圆包。分析原因是由于采用这种单极性驱动方式,A、C相绕组,B、D相绕组实际上是同轴线圈,在A相通电时C相也会感应出电流;同样,在C相通电时A相也会感应出电流,而电流波形直接影响转矩,电机在这样的驱动电路下转动,振荡依然明显,达不到细分想要的平稳运行,和不细分的转动效果相差不大。故不能采用。
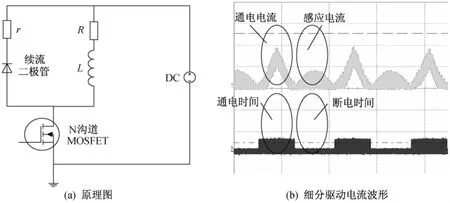
图4 传统单极性功率驱动器原理图及驱动电流波形
为达到理想的正弦型细分电流波形,避免感应电流的产生,设计了一种改进的单极性驱动电路用于细分控制,其原理如图5所示。

图5 单极性细分驱动器原理图
此方法采用细分控制和通路选择结合的方式进行驱动控制。VT1为P沟道MOS管,它串联在电源和步进电机的公共端之间,实现细分控制。在各相线圈的输出端和电源回路之间串联一个正向二极管和一个N沟道的MOS管,当A相工作时,VT2导通电流从电源正端→VT1→A→VD1→VT2→电源负端,VT3断开,VD2和VT3共同完成A相对C相干扰的抑制;VD3为续流二极管,无论A相还是C相线圈工作,当VT1断开时,都通过VD3形成续流回路。这种方法抑制了传统单极性驱动方法同轴线圈间的感应电流,可以得到想要的正弦型细分电流波形,下面将详细介绍用FPGA产生上述电路所需的加在功率管 VT1,VT2,VT3,VT4,VT5,VT6 前端的控制信号波形的具体实现方法。
2.3 基于FPGA的PWM细分驱动实现
控制器采用FPGA控制步进电机,因为FPGA可同步产生多路PWM电流波形,控制灵活,还可以通过改变控制波形表的数据,增加计数器的位数,提高细分精度,从而达到对步进电机的转角进行任意细分,控制方式简单,控制精度高,效果好。用单片机和DSP都难以达到同样的效果。
最常用的步进电机细分驱动电路有斩波式和PWM两种[5]。PWM细分驱动电路是将输入的控制电压转换成相应脉冲宽度的矩形波,通过对功放管通断时间的控制,改变输出到电机绕组上的平均电流[6]。由于电机绕组是一个感性负载,对电流有一定的滤波作用,而且PWM电路的调制频率比较高,一般大于20 kHz。因此,虽然是断续通电,但电机绕组中的电流还是比较平稳的。与斩波式细分驱动电路相比,PWM细分驱动电路的控制精度高,工作频率稳定[7]。因此本文采用FPGA实现的是PWM细分驱动。图6为PWM的基本原理。载波信号a(t)采用等腰三角形,调制波b(t),当b(t)>a(t)时输出为高,b(t)<a(t)时输出为低。改变调制波b(t)的幅值,调制信号的脉冲宽度(占空比)就会随之改变,这样输出到电机绕组上的平均电流值也会改变,即可实现细分电流的控制。
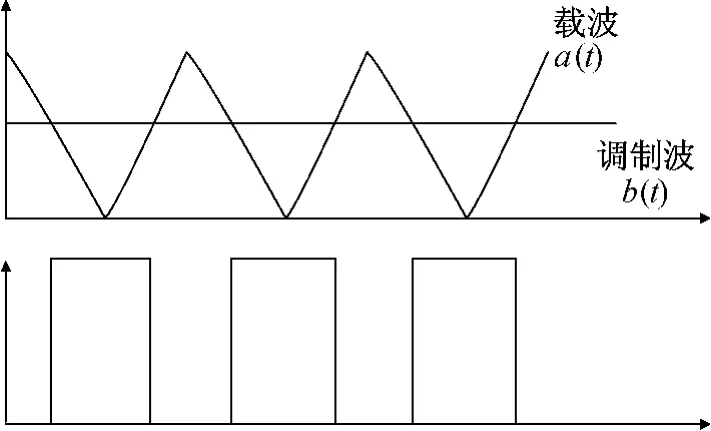
图6 PWM细分驱动示意图
图7为控制器部分系统结构图,由分频计数模块、分频模块、PWM波形存储器、三角波产生器、电机A相比较器、电机B相比较器、电机C相比较器、电机D相比较器等组成。锯齿波产生器在脉宽时钟作用下增减计数,产生20 K的周期性三角波,同时加载到四个比较器的一端,PWM波形存储器产生的 A相波形 data_out[15..12],B 相波形 data_out[11..8],C 相波形 data_out[7..4],D 相波形 data_out[3..0]分别加载到各数字比较器的另一端,当锯齿波计数器的值小于波形存储器输出数值时,比较器输出高电平。PWM波形存储器是根据电机细分电流波形的要求,将各个时刻四相细分电流波形所对应的数值存在波形存储器中。通过对地址计数器进行控制,可改变步进电机的旋转方向、转动速度、工作/停止状态,具体是由图8的状态机实现的,共有32个状态,代表了8细分后电流的32个状态值,每个状态下A,B,C,D四相电流波形的数字量如表1所示。在与三角波进行比较时,每种电流波形数字量代表了一个具体的正弦值。

表1 各细分状态下的相电流(数字量)对应值
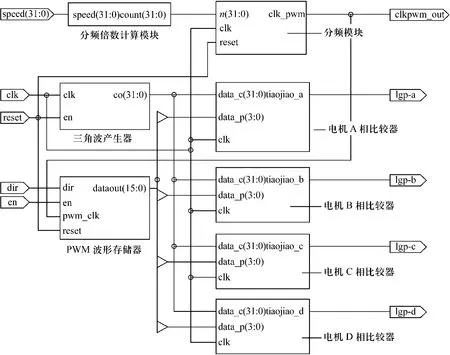
图7 细分控制结构图

图8 PWM波形存储器的状态机实现
VT1输入的是电机A,C两相的细分控制信号,VT4输入的是电机B,D两相的细分控制信号,故:VT1=(-A)+(-C);VT4=(-B)+(-D);VT2在A相输出时导通,其余时刻截止,防止其他相对A相产生不必要的感应电流。同理,VT3,VT5,VT6 分别在 C,B,D 相输出时导通,其余时刻截止。这样就用细分控制和各相通路选择结合的方法实现了单极性细分驱动器。
3 试验验证
根据前文所述,利用FPGA生成PWM八细分控制信号和四路通道选择信号。图9为输入在图5所示驱动管VT1上的A,C相细分信号和加在VT2,VT3上的通路选择信号。可以看出加在VT1上的细分控制信号是A,C两相工作时的输出。

图9 A,C两相细分控制信号和通路选择信号波形
图10为输入在驱动管VT1上的A,C相细分信号和加在VT4上的B,D相细分控制信号波形。放大后可看出每相的细分波形由占空比不同的矩形波构成,相位互差90°。
图11为将控制信号加在两相步进电机上后,测量绕组A,B两相的相电流波形图,可以看出,得到了互差90°的半波正弦型电流波形图,此时电机运行平稳,明显比不细分时振荡频率低。
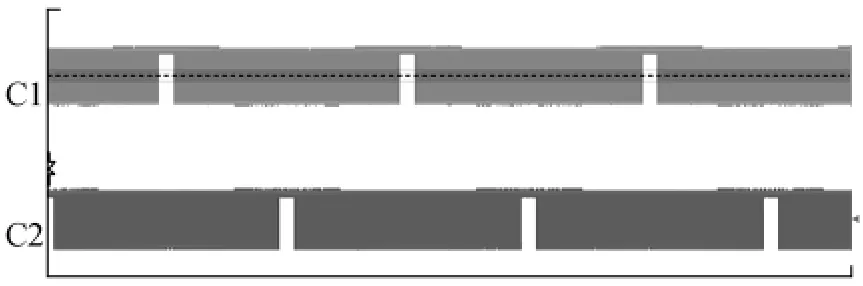
图10 A,C相和B,D相细分控制信号波形

图11 A,B两相绕组相电流波形
该方法经试验验证,其与双极性驱动效果相当,有效降低了振荡;且控制电路比双极性驱动简单,无需死区保护,不存在电源直通的风险,可靠性高。
4 结语
本文分析了两相式步进电机双极性细分驱动方法的不足,说明了传统单极性驱动方法会在线圈上产生感应电势和感应电流,是导致细分驱动不能平稳运行的原因。设计了一种单极性PWM细分驱动器,用FPGA实现了步进电机8细分控制信号,驱动电路得到了相位互差90°的四相半波正弦电流波形,该方法消除了线圈之间的相互电流感应干扰,并且不存在电源对地直通的风险,试验证明了该细分驱动器可驱动电机平稳运行,可应用在对可靠性要求较高的航天航空领域。
[1]王自强.步进电机应用技术[M].北京:科学出版社,2010.
[2]刘梦亭.基于FPGA控制的步进电机细分驱动系统[D].广州:广东工业大学,2008.
[3]周石磊.8eFPGA的两相混合式步进电机细分驱动的实现[D].成都:中国科学院光电技术研究所,2006.
[4]惠晶,肖荣.一种实用的步进电机细分驱动控制系统[J].微电机,2009,42(10):87-89.
[5]陈学军.步进电机细分驱动控制系统的研究与实现[J].电机与控制应用,2006,33(6):48-50.
[6]徐志跃,文招金,陈伟海.基于FPGA的两相步进电机细分驱动电路设计[J].电气传动,2008,38(4):59-62.
[7]王志超,林岩,李大庆.两相混合式步进电机细分驱动[J],信息与电子工程,2008,6(6):457-460.
猜你喜欢
电脑爱好者(2020年6期)2020-05-26
华人时刊(2020年23期)2020-04-13
时代英语·高一(2019年5期)2019-09-03
北京航空航天大学学报(2017年5期)2017-11-23
光学精密工程(2016年5期)2016-11-07
电测与仪表(2016年11期)2016-04-11
专用汽车(2016年9期)2016-03-01
电源技术(2015年5期)2015-08-22
专用汽车(2015年2期)2015-03-01
西安交通大学学报(2014年7期)2014-04-16
