基于自适应增量调制的语音延时电路设计
2012-07-02 05:44陈嘉鹏苏郁秋
电子与封装 2012年8期
陈 峰,陈嘉鹏,苏郁秋
(中国电子科技集团公司第58研究所,江苏 无锡 214035)
1 引言
普通的声音信号为模拟信号,要实现延时功能,须先用调制器将其转换成数字信号,经数字延时后,再通过解调器还原成模拟信号输出。
传统的PCM即脉冲编码调制,对每个采样信号的幅度进行量化编码,具有对任意波形量化的能力,但忽略了相邻样值的相关性,需要较长的码,结构复杂。DM(Delta Modulation)即增量调制,是对实际与预测的采样信号之差的极性进行编码,用一位码即可表示相邻抽样值的相对大小。自适应增量调制ADM(Adaptive Delta Modulation)是在DM上的一种改进,通过自动调整步距,使调制的信号失真更小,噪声更低。理论研究表明,在信号速率低于40kb/s时,ADM效果优于PCM,而且采用ADM方式的调制解调电路都相对简单[5]。
2 增量调制(DM)
增量调制是一种预测编码技术,它对实际采样信号与预测采样信号之差的极性进行编码,采用一位编码,如果实际采样值大于预测采样值则用“1”表示,如果实际采样信号值小于预测采样值则用“0”表示,接收端每收到一个“1”码就使输出上升一个Δ值,每收到一个“0”码就使输出下降一个Δ值,连续收到“1”码(或“0”码)就使输出一直上升(或下降),这样就可以近似地复制出阶梯波形,此时再用低通滤波器滤除其中的高频分量,即可还原出原始输入信号[4]。
DM存在量化噪声,通常有两种。一种为斜率过载(Slope Overload),是由于步距Δ值太小,以至于预测信号跟不上斜率较陡峭的模拟信号;另一种为一般量化噪声,又叫粒状噪声(Granular Noise),是由于在信号斜率较平缓的地方,编码输出序列为交替的“1”和“0”,如图1所示。
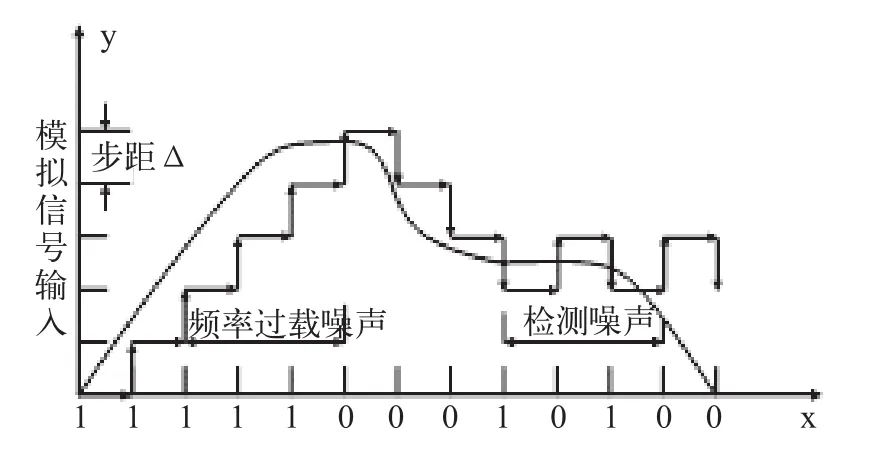
图1 DM量化噪声示意图
由图1我们可以看到DM系统的采样率必须足够高,如此不仅能降低斜率过载噪声,又能取较小的步距Δ值从而减小一般量化噪声。因此DM系统中的抽样频率要比PCM系统的高得多,称为过采样(远高于奈奎斯特速率)。由于较高的采样频率,对于DM系统的抗混叠滤波器的要求也较低。通常DM系统也不需要专门的采样/保持电路,因为进行量化的电路本身就要进行采样。
3 自适应增量调制(ADM)
由以上分析可知,在采样频率固定的情况下,选择合适的步距Δ值来同时减小斜率过载噪声和一般量化噪声是不可能的,增大步距Δ值虽然减小了斜率过载噪声,但却会增大一般量化噪声,反之亦然。因此有人提出自动改变步距Δ值的方法,在信号较陡时增大Δ值,在信号平缓时减小Δ值。
一种自适应方式是使量阶大小随信号幅度瞬时压扩,称为瞬时压扩增量调制,假如调制器输出为“1”和“0”,当输出不变时步距Δ值增大一倍,而当输出改变时步距Δ值减小一半。
另一种方式称为连续可变斜率增量调制(CVSD)。当输出中出现连续的“1”和“0”时,表明斜率出现过载,这时增大步距Δ值,当不出现连续的“1”和“0”时,步距减小直到最小。本文采用这种方式[1]。
4 系统及硬件实现
输入的音频信号x(t)经过二阶的抗混叠低通滤波器,将输入信号与预测信号进行比较,输出的高低电平由第一级D触发器进行采样作为编码输出,输出码流通过四个连续0/1判断送出一个信号进入到电流源中的音节积分器,从而调节步距Δ值的大小,而第一级触发器的输出控制电流源的极性,从而决定是对原信号增加步距Δ值还是减小步距Δ值。输入编码电路如图2所示[2]。
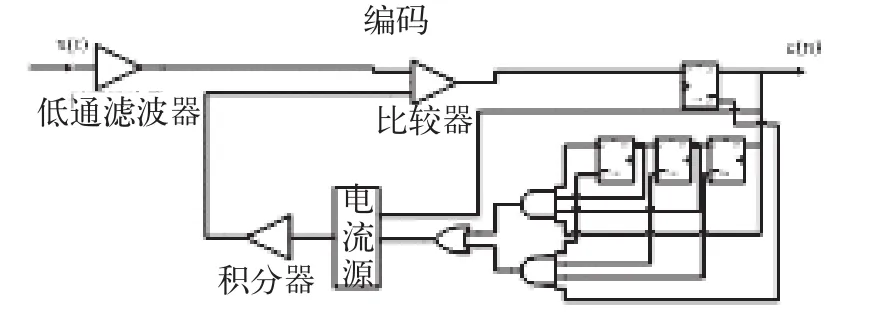
图2 输入编码电路
编码输出c(n)经过存储器形成延时,输出码流经过可变增量调制模块对积分器积分,最后通过一个二阶低通器滤除高频分量还原成原始输入信号。解码电路如图3所示。
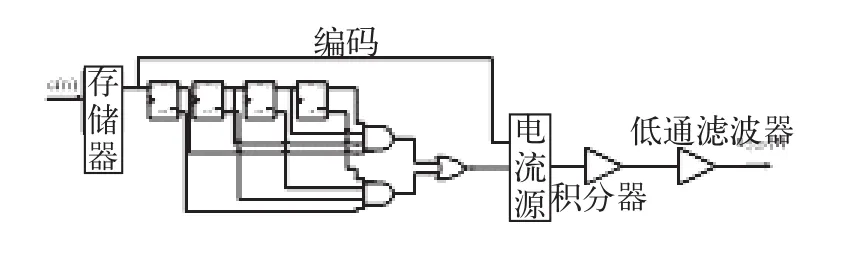
图3 解码电路示意图
图中积分器、低通滤波器由于没有带低阻抗负载,因此采用较为简单的两级无缓冲运算放大器就能满足要求。为了要提供足够的相位裕度,防止放大器自激,加入了补偿电容。为了提高速度,比较器在放大器基础上加大了偏置从而提高了速度。 图2、图3中电流源配合连0/1检测电路完成步距Δ值的自动调整,并将0/1转换成正向/负向积分。电流源电路如图4所示[3]。
图中Vin1开关与左边的R1、R2、C构成音节积分器I2,负责自动调节步距Δ值的大小,当预测信号无法跟上输入信号时,比较器将持续输出“0”或“1”,当触发器检测到连续四个“0”或“1”时,将把开关Vin1打开,通过电阻R1对电容C充电,使C上极板电压升高,因此镜像到输出端的电流Iout也增大,使步距Δ值增大,从而减小斜率过载失真;当预测信号可以跟上输入时,比较器将间隔输出“0”或“1”,Vin1关闭,电容上的电荷通过R2对地放电,电容C上极板的电压减小,镜像到输出端的电流Iout也减小,从而减小一般量化噪声。这里,我们选取R1=5K,R2=50K,C=100n,使得放电时间常数为R2×C=5ms。

图4 电流源电路示意图
图中Vin2为第一级触发器输出,完成对积分器充/放电选择的功能。
预测信号产生电路如图5所示。

图5 预测信号产生电路示意图
Iout为电流源输出电流,积分电容为C,REF偏置为电源电压的一半,x(t)即为预测信号输出。
假设输入的是正弦函数,A为振幅,ω为信号角频率,f为对应信号频率,Δ1为步距, fs为采样频率,T为对应的采样周期,则系统能跟踪的最大斜率为Aω=Δ1fs。



因此,为了不产生失真,应该选取合适的电流和电容值以满足以上等式。
图6为实际ADM调制解调使用Hspice的仿真波形图,上面的曲线为预测信号的输出,可以看到在电源电压一半的地方即信号斜率较陡处,步距Δ值较大,而在波峰波谷斜率较平缓处,步距Δ值较小,且含有一般量化噪声;下面的曲线为预测信号经过低通滤波器滤波后的波形。在输入信号第二个周期用four函数计算的谐波失真小于0.5%。电路采用0.5μm工艺流片,典型工作电压为5V,实测延时后的噪声电压为-88dBV,总谐波噪声+失真<0.5%。

图6 ADM调制解调仿真波形图
5 结论
以上分析了自适应增量调制解调的原理,通过流片验证,其输出的音频信号品质较高,具有较为优良的性能。通过对电路添加适当的外围器件可以使其产生各种不同的混响效果,因此可以广泛应用在如扩音器系统、卡拉OK系统、CDDVD、车载音响、调音台等需要混响的场合,产生较高品质的混响效果。
[1] Continuously Variable Slope Delta Modulation: A Tutorial[P]. MX-com Inc,1998.
[2] Digital Coding of Waveforms: Principles and Applications to Speech and Video[M]. N. S. Jayant and P. Noll, Prentice-Hall, Englewood Cliffs, N. J., 1984.
[3] Phillip E.Allen Douglas R.Holberg 著,冯军,李智群,译. CMOS模拟集成电路设计[M].北京:电子工业出版社,2006.
[4] 樊昌信,詹道庸,等. 通信原理[M].北京:国防工业出版社,1995.
[5] 轩素静,邹玉斌. 自适应增量调制的仿真实现及性能分析[J].计算机测量与控制,2003,11.
猜你喜欢
铁道建筑技术(2021年4期)2021-07-21
山西化工(2021年1期)2021-03-15
物理之友(2020年12期)2020-07-16
作文周刊·小学一年级版(2020年16期)2020-06-12
商品与质量(2019年7期)2019-07-24
通信电源技术(2018年5期)2018-08-23
福建中学数学(2016年7期)2016-12-03
光学精密工程(2016年1期)2016-11-07
电测与仪表(2016年24期)2016-04-12
电测与仪表(2016年6期)2016-04-11