
基于可重构计算系统的波束形成网络设计与实现
2012-07-02 00:50汪高武
兵器装备工程学报 2012年4期
汪高武
( 中船重工第七一六研究所,连云港 222006)
声纳是潜艇隐蔽作战最重要的水听设备,波束形成是声呐信号处理的主要组成部分,无论是被动声呐还是主动声呐,都要有波束形成系统。波束形成算法是数据密集型的算法,在雷达、声纳信号处理系统中,通常采用DSP 软件编程实现。DSP 通过使用超长指令字和单指令多数据体系开发了指令集并行提高DSP 的执行效率,但DSP 主要用于单信号处理器的设计,硬件上不支持多DSP 通讯协议。因此难以应用于波束形成网络的设计与实现。
随着电子技术的发展,基于可编程器件的可重构计算系统诞生了。可重构计算兼具定制计算的灵活性与通用计算的高效性,是一种全新的计算方式。可重构计算系统包含丰富的可重构处理单元( RPU)和数量有限的DSP 单元,并且系统具有良好的扩展能力,可以订制RPU 发布/收集来自每个附加DSP 的数据,适合于大规模的波束形成网络的设计和实现。
本文研究自适应波束形成在可重构计算系统上的设计与实现,设计了波束形成器引擎。通过调用自适应波束形成器引擎,在可重构计算系统上订制所需规模的波束形成网络。
1 可重构计算的概念
可重构计算这一概念早在20 世纪60年代就已被提出[1],通过多路选择器控制不同计算部件之间的数据传输通路,从而可以使用相同的硬件平台完成不同的计算任务,达到计算资源重用的目的。基于SRAM 的FPGA 的问世标志着现代可重构计算技术的开端,并极大地推动了其发展。目前研究的可重构计算是指从20 世纪80年代开始,通过在计算平台中加入一些拥有编程能力的特殊硬件,并且在其上面定制不同的电路用以对不同的计算任务进行优化,提高整个平台的计算性能[2]。
可重构计算提供了时空域上的计算方式[3],允许在系统的柔性和执行速度之间进行折中,打破了传统的硬件和软件之间的划分界线,提供了更高的计算能力和执行速度,如图1所示。可重构计算在不降低系统的执行速度的基础上,使用了运行期间可被配置的硬件为系统提供更大柔性。利用可重构计算系统的自适应性可以开发细粒度或粗粒度的并行算法,在可重构计算系统上开发算法的并行性可以获得比传统的微处理器更高的算法执行效率。硬件的可配置性允许为特定计算定制硬件,以获得比软件执行更高的计算速度。复杂的功能可以被映射到体系结构中以提高硅芯片的利用率,并且避免取指和访存等瓶颈。另外,可重构计算与通用处理器、工作站甚至巨型计算机相比,在速度上都有无可比拟的优越性,而且它的体积小、功耗小,成本相对很低,具有极高的可靠性和性价比。

图1 可重构计算带来的柔性并行模式
2 目标辐射噪声建模
潜艇、舰船、鱼雷等水下目标在航行或作业时,推进器和各种机械都在工作,它们产生的振动通过船体向水中辐射的声波就是目标辐射噪声,辐射噪声是被动系统赖以探测、跟踪水下目标信号。
基阵L 上的N 个阵元都是全向的,远场R 中有M 个频率为f0、互不相关的正弦点源。远场R 和基阵( 接收换能器阵)L 都位于同质介质( 海洋环境)中,将阵元从1 到n 编号,并以位于坐标原点的阵元1 作为时间参考点,如图2 所示。
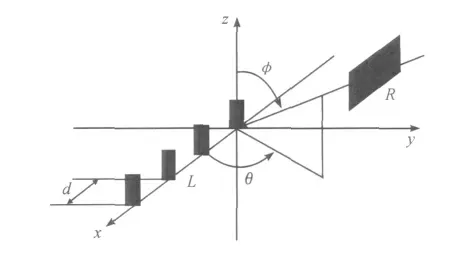
图2 坐标系的定义
远场R 中,有方位为( θi,φi)的第i 个点源形成的平面波,该平面波到达第l 个阵元所花费的时间比其到达坐标原点所花费的时间多出:

其中:Rl是第l 个阵元的位置向量;( θi,φi)是方位( θi,φi)上的单位向量;c 是平面波前的传播速度;·代表向量内积运算。对于在x 轴上均匀等间距( 间距为d)排列、第一个阵元位于坐标系原点的线性基阵,上述公式变为

远场R 中第i 个点源在坐标原点处的参考阵元上产生的信号,用复数形式的表达式表述为

其中si( t)代表调制函数。设平面波到达第l 个阵元所花费的时间比其到达参考阵元所花费的时间提前了τl( θi,φi)秒,则远场R 上的第i 个点源在基阵L 的第l 个阵元上产生的信号为

海洋环境噪声是水声系统工作的主要背景噪声,工程上用高斯白噪声表示。计算机模拟产生的海洋环境噪声是一个高斯分布的白噪声序列,其方差由水声系统工作频率处的环境噪声级确定。
设xl( t)表示远场R 中的所有点源和海洋环境背景噪声在基阵L 中第l 个阵元上产生的总信号,则

其中,nl( t)是在第l 个阵元上产生的均值为0,方差为的白噪声。若基阵阵元不是全向的,则一个点源在各个阵元上产生的信号值将随着点源方向的变化而变化。
3 声纳基阵输出信号的数学模型
当声纳水听器阵列接受系统阵元空间布好之后,无论什么形状的基阵,在空间布设好之后,我们可以找到一个参考点,建立球坐标,并推导出与之相关的波束指向性函数。设信号的输入方向为( θi,φi),如果保持信号的强度不变,那么这个系统的输出D( θi,φi)就是反应了它对不同信号的灵敏度,D( θi,φi)就是基阵系统的指向性函数。如果D( θi,φi)在( θi=θ0,φi=φ0)取得极大值,则称D( θi,φi)/D( θ0,φ0)为归一化指向性函数。指向性函数是声呐系统的最基本的特征之一。指向性函数不仅与基阵形状有关,还与入射信号的方向有关。
从直观上来说,指向性函数的概念表达了基阵和波束形成系统的这样一种能力[4]:
1)把信号集中于某一方向;
2)抑制其他方向来的干扰和噪声。
平面波以角度θ 入射到N 元等间距直线阵,可以推导出该系统的归一化自然指向性函数为

D( θ)表明,一个多元阵输出幅度大小随信号入射角而变化。远场R 中的M 个点源形成的平面波,在基阵的各个阵元上均产生M 个信号迭加,而各个阵元上信号迭加后输出的结果不同,一般不能形成同相相加或得到最大的输出。对于上述直线阵来讲,只有来波方向得到最大输出。然而,任意阵形的阵经过适当的处理,可以在预定方向得到最大输出,这就是基阵具有方向性的原理。
4 波束形成器的重构引擎
多个波束形成器组成波束形成网络,实现对多个目标的跟踪,由m 个波束形成器、每个波束形成器有n 各水听器组成的波束形成网络可以表示为

波束形成器的重构引擎用于在可重构计算系统上构建波束形成网络的一个节点,其本质是一个IP 核配置文件。可重构计算系统采取以下设计思路来实现数字波束形成网络的重构控制:首先,声纳显控台通过专门配置信道向可重构信息处理系统发出控制指令;然后声纳显控台调用磁盘阵列上的波束形成IP 核、权系数优化准则IP 核,并且输入配置参数( 如波束形成网络的载荷等信息),通过配置信道发送这些IP 核与配置参数。可重计算系统接受IP 核文件并存储在合适的存储空间,由微控制单元完成自适应波束形成器电路的定制。继重构完成后,通过配置信道广播发送配置“完成”信号,通知声纳显控台。该设计思路的关键技术和难点主要是波束形成IP 核和权系数优化准则IP 核的设计。
4.1 总体设计
常规波束形成模块要求处理速度快、数据率高、易于实现,一般只要加权求和,而不需要计算复杂的算法;自适应算法模块所要求的计算量大,实现起来较复杂。据此,常规波束形成模块由DSP 功能单元( 可重构计算系统上提供了丰富的DSP slice)构建,自适应算法模块由RPU 构建。自适应算法模块仅以最小均方误差算法为例说明权系数优化准则IP 核的设计。
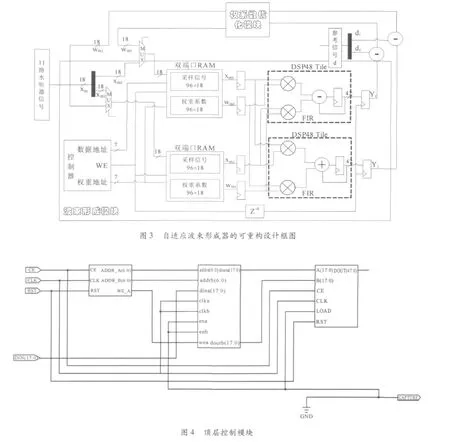
如图3 所示,整个自适应波束形成器分为两大模块: 权系数优化模块和波束形成模块。权系数优化模块通过调用最小均方误差IP、最小信噪比IP、最大似然IP、最小噪声方程IP 对RPU 区域重构,实现自适应算法的切换。波束形成模块由控制器、双端口RAM 和FIR 滤波器组成。
4.2 波束形成IP
1)控制模块
整个系统有两个控制模块: 顶层控制模块、存储控制模块。顶层控制模块的功能包括:产生系统时钟控制信号并触发各模块的启动、初始化各模块、产生控制信号并控制各个模块完成特定功能、协调各个模块的操作。如图4 所示。
存储控制模块的功能包括:为自适应算法模块和双端口RAM 模块提供使能信号,产生存储器读/写地址。如图5所示。

图5 同步控制模块
2)双端口RAM 模块
声纳水听器基阵接受的信号经A/D 转换后,采样所得的数字信号存储在双端口RAM 模块中;另外,权系数优化模块产生的自适应权重向量也存储于双端口RAM 模块中。FPGA 芯片上有丰富的存储资源,并以原语模板的方式供给用户编程使用。
3)FIR 滤波器模块
每个基阵有n 个水听器,则基阵接受的信号为

其中

基阵的权值向量W 由自适应算法模块生成

其中

则一个平板阵输出的信号为

从式(12)可以看出,波束形成器是利用高速时钟来驱动复数乘加器,实现对阵元信号的处理。每路阵元输入信号是对水听器接受信号进行下变频处理后的输出基带分量。一个11 元线阵的数字波束形成器需要完成44 个乘法和42 个加法运算。FIR 滤波器主要组件包括:加法器、乘法器、存储器和时延元素。FPGA 协处理器上的DSP48 slice 包含了上述所有元素,因此DSP48 slice 是实现FIR 滤波器的理想组件。
FIR 滤波器模块有两个输入端口,一个端口接受来自一个声纳水听器的输入信号xm,另一个端口接受自适应权值产生模块输出的权值wm,它们都是复数,因此乘积也是复数形式:xmr×wmr,xmi×wmi,xmr×wmi,xmi×wm,前两项的差为乘积结果的实数部分,后两项的和为乘积结果的虚数部分。在Xilinx ISE 平台上用一片DSP48 Slice 实现乘法器生成的RTL如图6。

图6 Xilinx ISE 环境下乘法器综合后的RTL
4 片DSP48 Slice( 分别实现上述xmr×wmr,xmi×wmi,xmr×wmi,xmi×wmr四个乘法)可以组成一个复数乘法器,用并行加法树或串行累加运算,最终形成滤波器的输出。
4.3 权系数优化IP
自适应算法的功能是产生并调整舷侧三元子阵各阵元的权值,使波束形成阵列对期望信号有效接受,对干扰信号尽量抑制。最小均方自适应算法( least mean square,LMS)较其他自适应算法具有结构简单,计算量小,易于实现等特点。目前,LMS 算法被广泛用于估计波束形成基阵的优化权系数。LMS 算法是在已知期望信号d 的条件下,利用随机梯度法最小化误差e( k)

从而得到权向量的迭代公式

其中,μ 为步长因子,它决定了算法的收敛速度。在可重构信息处理平台上,利用RPU 开发LMS 算法,如图7 所示。
5 仿真验证
波束形成IP 核由两片DSP48 分别完成信号的实部与虚部的处理。现以一片DSP48 为对象,进行典型信号跟踪性能仿真,在System Generator 环境下其仿真框图如图8 所示。
远场点源发出的离散脉冲信号如图9 所示,单片FIR 滤波器与寄存器组成的系统输出结果信号如图9( b)所示。从图9 可以看出,原始信号与系统输出的信号之间:图9( a)信号强度有损失,图9( b)信号存在时延。仿真结果验证了系统功能的正确性。
图10 是Xilinx ISE 平台上,经综合、布线后,系统分析硬件芯片的使用情况报告。


6 结束语
本文通过可重构计算技术,实现对波束形成网络载荷的灵活控制。设计并实现了波束形成器的IP 核,通过仿真验证了方案的正确性与可行性。
[1]Estrin G,Bussel B,Turn R,et al. Parallel Processing in a restructurable computer system[J]. In IEEE Trans Elect Comput,1963:747-757.
[2]沈英哲.可重构计算系统中软硬件代码划分技术研究[D].合肥:中国科学技术大学,2007.
[3]Kathering Compton,Scott Hauck. Reconfigurable Computing:A Survey of Systems and Software[J].ACM Computing Surveys.2002,34(2):171-210.
[4]田坦,刘国枝,孙大军.声纳技术[M].哈尔滨:哈尔滨工程大学出版社,2000.
猜你喜欢
航天返回与遥感(2022年1期)2022-03-09
价值工程(2019年14期)2019-07-17
航天返回与遥感(2018年5期)2018-11-12
水下无人系统学报(2018年5期)2018-11-09
科学与财富(2018年13期)2018-06-13
电子技术与软件工程(2018年17期)2018-02-26
弹道学报(2016年4期)2016-12-14
火控雷达技术(2016年2期)2016-02-06
火力与指挥控制(2015年4期)2015-06-23
舰船电子工程(2015年4期)2015-03-15
