
基于功能的惯性平台机内测试技术
2012-07-02 00:51邵伯川侯书铭
兵器装备工程学报 2012年7期
邵伯川,侯书铭,姜 伟
(第二炮兵工程大学 304 室,西安 710025)
惯性平台系统是很多飞行器的主要导航设备,它负责测量载体的姿态信息和视加速度。作为一种高精密的机电一体化设备,其测试设备系统复杂,对操作人员的要求高,测试效率不高。近些年发展起来的基于PXI,VXI 等的自动化测试设备虽然在一定程度上减少了对人员的要求,提高了测试效率,但它不能满足为系统提供实时监测的能力。机内测试是目前复杂系统测试发展的一个重要方向,它能使系统摆脱复杂的外部测试设备并提供系统的关键参数实时监控能力。如何充分利用平台自身所能提供的信息,添加少量的软硬件,使其具有自检测能力,是摆脱复杂测试设备并解决测量成本和测量时间矛盾的一个重要的研究方向[1]。
1 平台式惯导系统原理
平台式惯导系统主要由稳定平台、框架、安放在平台上的加速度计和框架轴上的角度传感器构成。稳定平台是通过惯性测量角度传感器构成。稳定平台是通过惯性测量元件和稳定控制回路,使平台台体与外部相对隔离、使其方位保持在惯性空间中不变或按一定的规律改变。加速度计通过内部敏感器件和外围电路把在平台台体个方向的加速度转换成电量。角度传感器测量各轴相对转过的角度,通过变换获得载体的姿态信息。
2 测试需求及原则
测试的目的主要是完成平台各项功能的故障诊断,主要包括各项功能测试和精度测试内容。其具体的项目包括电源电压和频率测试、测温电阻阻值检查、电流测试、框架角传感器输出检查、回路功能检查、开关量测试、陀螺漂移测试、加速度计参数测试等。
根据机内测试的要求,要充分利用系统本身所能提供的信息,力求简洁,即无附加零零部件或尽量少零件的情况下实现机内测试[1],并考虑增加部件自身的测试和使增加部分对原系统的影响降到最小。
3 测试原理
3.1 稳定回路测试分析
平台稳定回路工作原理如图1 所示,当平台受到干扰力矩Mf的时候,台体以角速度α 转动,陀螺仪敏感到角速度α,并输出与角速度成比例的信号,经滤波整形后送给前置放大器变成直流电压,在经前置放大、校正网络、功率放大等环节驱动框架力矩电机转动,产生一个与干扰力矩大小相等,方向相反的力矩抵消掉Mf,从而使平台稳定在惯性空间。平台还具有修正回路的工作模式,具体的原理是给平台一个指角速度β,将直流角速度换算成施矩电流,输入陀螺的力矩器,通过稳定回路,平台台体将以一定的角速度跟踪指令角速度。
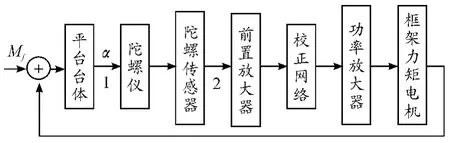
图1 稳定回路工作原理
在平台设计时,由于惯性器件需要一定的加温时间,在未稳定之前加入回路会使回路不稳定甚至损坏惯性器件,在图1 中的位置2 加一个继电器开关来保证陀螺启动好后才闭合回路。在加温完成之前,把位置2 作为输入点进行激励,多极旋转变压器的输出作为响应,建立正常状态下的输入输出表征函数,通过不同的激励信号可以检测系统中除惯性器件外部件的故障。
加温好以后,可以给陀螺仪加电启动,通过测量陀螺转子电机的电流来判断陀螺好坏。回路稳定后,对陀螺力矩电机施加指令角速度电流,通过框架角输出量作为观测量判断修正功能是否正常。若正常,则转入精度测试。
3.2 精度测试分析
平台系统的精度主要指陀螺漂移、加速度计零位和脉冲当量等的测试。由于不利用外部转台,无法提供精密的基准,我们考虑利用内部传感器的解析冗余关系来验证惯性器件的精度。
三轴平台系统中加速度计的精度要高于陀螺仪,我们通过用加速度计信息来调平,框架角的输出信息锁定,把平台锁定到一定的位置上进行陀螺仪误差系数的标定。引起平台漂移的主要原因是陀螺仪输出轴上的干扰力矩所导致的陀螺仪漂移。陀螺的漂移通过伺服回路的作用,使框架力矩电机产生不稳定力矩而导致平台台体相对于框架轴产生角运动。因此,对平台静基座条件下的测试,实际上是确定陀螺仪的漂移系数。
在重力场中,若忽略二次项,则陀螺仪在静态位置的输出模型可简化为

其中:WP是陀螺输出角速度;K0为零次项漂移;K11、K12分别为沿陀螺仪输入轴和输出轴的一次项漂移系数;g1、g2分别是当地重力沿陀螺输入输出轴上的分量;Ω 为测试点地速沿陀螺输入轴上的分量。
在机内测试时,由于不借助外部转台,我们采用力矩反馈法闭环测漂的方法对平台漂移量进行测试。具体的原理为:给陀螺力矩器施加一个指令角速度Ws,当力矩器产生的力矩与干扰力矩MT平衡时,陀螺仪输出为零。
指令角速度Ws与输入电流的关系:

其中:KT为陀螺仪力矩系数;IT为输入电流;H 为陀螺仪转动惯量。由于当地的地速是已知的,只要找到陀螺输入轴方向同地理北向的夹角,经过多位置的转动,就可以获得多个类似方程(1)的式子,很容易解得各个误差项的系数[2]。
加速度计的测试原理与陀螺仪类似,多采用正负倒置的方法,其转动角度由框架角传感器提供。
4 测试方案与实现
4.1 系统总体结构
通过对测试需求及原理的分析,系统要完成的是要想完成平台惯导系统的自测试必须给平台引入MCU 来控制激励、采集和分析来完成测试任务。某单轴液浮陀螺构成的三轴平台的测试方案如图2 所示。

图2 测试方案
测试系统分为3 级,顶级为处理器及外围芯片的自测试[3],第2 级为功能测试,最低级为系统惯性器件精度测试。顶级自测试采用边界扫描等完成所添加软硬件的自测试;第2 级完成系统基本功能的判断,尤其是在加温系统非惯性部件的测试,以便于后面的精度测试;最后利用控制器,给陀螺力矩器加调宽电流激励,控制框架转动到不同的位置,完成陀螺仪和加速度计的精度测试,即分离出误差系数。都符合要求的话即完成测试,通过控制器分析故障部位,进行容错或者隔离。
4.2 硬件设计与实现
测试系统包括信号调理电路、恒流电路、通道选择电路、AD、DA、FPGA、DSP 等,采用PFGA 加DSP 的结构,DSP 选用TMS320F28335 是TI 公司的32 位浮点型控制专用数字信号处理器,具有运算速度快、低功耗等特点,主要完成信号处理和控制信号的产生。FPGA 模块采用Altera 公司生产的Cyclone III 系列中的EP3C25 芯片,主要完成外围信号的获取,如加速度计的脉冲计数,PWM 调宽波形的产生,框架角信息的获取、与外部总线的接口设计。
为保证测温电阻值的高精度测量,电阻值采用恒流激励测电压的方法对其进行测试,并利用四线接法。为了保证系统的可靠性,在系统中内置一个标准电阻,通过标准电阻的阻值来判断测量系统的精度。AD 采用回采基准源电压的方式来完成自检。进行各项测试的过程中,测温电阻的值通过FPGA 里的控制器巡回获得,并在FPGA 里完成门限比较,若不正常则在DSP 的中断输入引脚上产生一个中断信号。
陀螺的施矩利用由FPGA 产生的调宽脉冲来实现,由于FPGA 输出的电压较小,加放大驱动后送入极性开关,通过两对极性开关的开合来完成对力矩器的正反施矩。开关的转换时间是影响精度的另一个原因,其转换时间将影响到施矩电流脉冲边沿的波形,因此要尽量选择导通和闭合时间短,漏电流小的极性开关。由于对施矩电流的要求很高,采用LM339 产生稳压基准,利用低漂移的放大器AD8510 组成双反馈网络来保证电流的高精度和高稳定性。
4.3 系统软件与实现
该系统的软件设计主要完成包括信号采集、控制算法、数据的分析计算、故障诊断及与外部总线接口等。根据测试要求,利用Verilog 和C 语言分别完成了PFGA 和DSP 的相关程序,其软件设计流程如图4 所示。
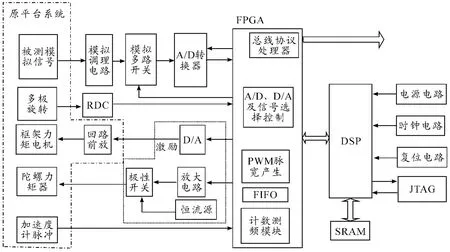
图3 系统原理
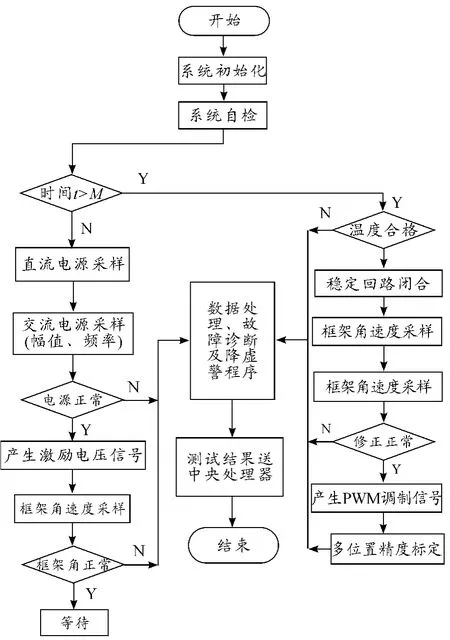
图4 软件设计流程
5 结束语
针对现有平台测试复杂,在认真分析系统工作原理的基础上,根据机内测试原则设计了本测试方案。系统添加的DSP+FPGA 利用了导航装置的配置[5],通过扩展,还可以完成系统的边界扫描测试控制器的设计,拖过精确地激励电流还可以完成平台的自对准工作[6-7],且添加部分都设计了自检测能力,因此这个机内测试设计符合BIT 技术的要求,有一定的工程应用价值。
[1]陈光军,赵大炜,任章.惯性仪表自检测技术研究[J].机电产品开发与创新,2003(4):23-25.
[2]秦永元.惯性导航技术[M].北京:科学出版社,2005.
[3]邱晓天,吕克洪,张丰言.某陀螺地平仪自检测系统设计[J].测试技术学报,2010,24(1):89-92.
[4]李飞飞,苏延川,王鹏.基于DSP 的FPGA 配置方法研究与实现[J].现代电子技术,2011,34(24):60-62.
[5]杨侃.基于DSP 和FPGA 的导航计算机硬件电路设计[D].哈尔滨:哈尔滨工程大学,2009.
[6]杨华波,蔡洪,张士峰,李华滨.高精度惯性平台连续自标定自对准技术[J].宇航学报,2006,27(4):600-605.
[7]韩文广,王秀森,宋伟.基于MultiGen Creator 的惯性平台三维建模的关键技术[J].兵工自动化,2011(12):20-22.
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
北京航空航天大学学报(2021年9期)2021-11-02
中国民航大学学报(2020年2期)2020-06-15
中国惯性技术学报(2019年1期)2019-05-21
中学课程辅导·教师通讯(2018年10期)2018-09-04
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
中学生数理化·高一版(2017年3期)2017-07-08
山东工业技术(2016年15期)2016-12-01
火控雷达技术(2016年1期)2016-02-06
