
钢轨踏面电磁超声检测信号处理方法
2012-05-14 06:45,,,
无损检测 2012年5期
,,,
(哈尔滨工业大学 军用电器研究所,哈尔滨 150001)
钢轨在长期运行过程中,由于滚动接触疲劳引起的踏面剥离、裂纹等缺陷严重威胁着列车的运行安全。目前,无损检测技术中所用压电超声检测技术依赖于声耦合剂,检测速度受到限制;与之相比,电磁超声换能器(electro magnetic acoustic transducer,EMAT)以其非接触、无需耦合剂等优势逐步被国内外研究机构所青睐,各种产品相继问世。对于电磁超声钢轨检测仅有英国、加拿大、俄罗斯等进行了研究,但是均未见相关产品应用的报道[1-3]。
然而EMAT换能效率低,接收到的回波信号幅值一般仅为微伏级,并且对周围环境噪声敏感度高。即使通过模拟电路对其放大滤波,仍然难以达到检测要求。基于以上原因,笔者针对电磁超声回波信号的周期性、窄带性、相关性等特点,进行了电磁超声数字信号处理算法的研究。
1 试验系统
以基于电磁超声表面波的钢轨踏面缺陷检测系统为试验基础,该系统总体框图如图1所示。包括电磁超声表面波换能器、发射电路、接收电路、基于USB的数据采集电路 (包括数据采集电路、FPGA控制电路和USB接口电路)、上位机等几部分。EMAT探头采用收发一体的单探头结构,利用脉冲反射法实现对钢轨踏面缺陷的有效检测。
系统工作过程如下所述:上位机通过USB控制FPGA发出控制信号,触发发射电路工作,驱动EMAT探头在钢轨中激发出表面波;表面波沿钢轨踏面传播,遇缺陷时,由于声阻抗的变化会发生反射,回波信号被EMAT探头接收,经滤波放大后传送到数据采集电路;采集到的回波数据通过USB上传到上位机,进行后续处理、分析及显示。
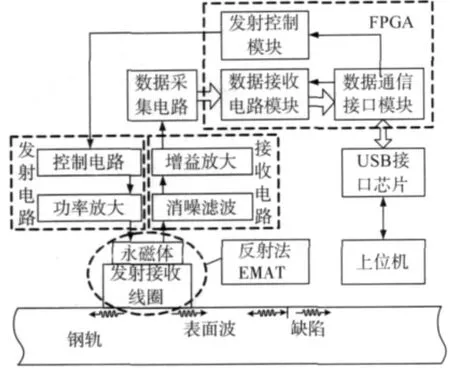
图1 钢轨踏面缺陷检测系统总体框图
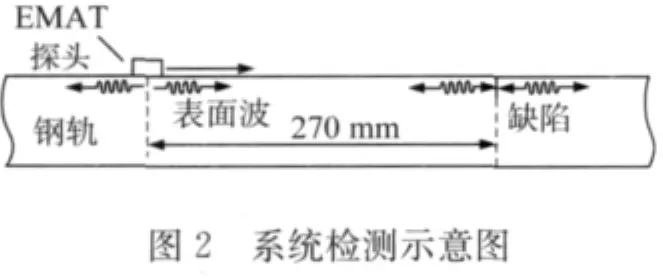
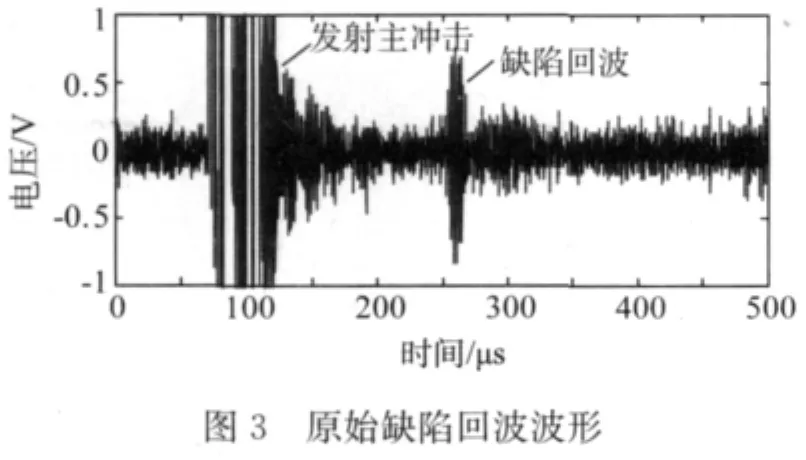
在钢轨踏面加工一个长度为30 mm、深1 mm的裂纹缺陷,利用该系统对其进行检测,如图2所示,探头频率为500 kHz,采样率4 MSPS,采样点数2 048点。接收到的回波波形如图3所示,作为下文处理方法的处理对象。
2 电磁超声检测信号处理方法
EMAT换能效率低,接收信号常被噪声湮没。为从微弱的电磁超声接收信号中提取有用信息,采用数字信号处理算法对其进行消噪、包络提取等处理,其流程如图4所示。
2.1 小波消噪

图4 信号处理流程框图
小波变换属于时频分析的一种,具有时频局部性、多分辨特性等诸多优点,已成为EMAT回波信号分析中一种重要的处理方法。因此,采用小波变换对接收回波信号进行消噪处理。
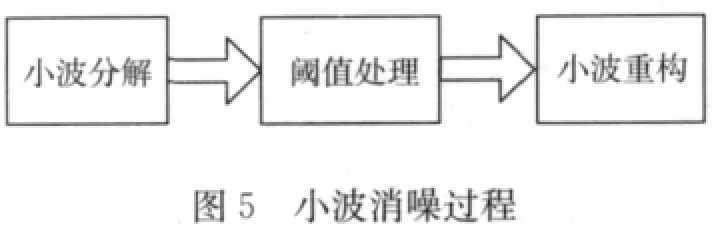
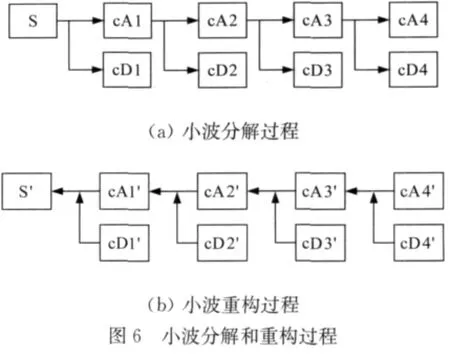
采用基于滤波器理论的快速小波算法(Mallat算法)[4],以4层小波分解为例,消噪过程如图5所示,其中小波分解和重构示意图如图6所示。
2.1.1 小波分解
可供选用的小波基函数种类众多,综合考虑消噪效果和运算量后,选用db4小波基函数。对图3所示的电磁超声回波信号进行4层小波分解,得到各层的小波系数如图7所示。

图7 小波分解系数
2.1.2 阈值选取
阈值的选择对消噪效果起决定性作用。笔者选用软阈值的处理方法,为选择合适的阈值,采集不含缺陷信息的噪声信号,如图8所示,用db4小波基函数对该噪声信号进行小波分解,根据获得的小波系数选择合适的阈值,以达到较好的消噪效果。
2.1.3 小波重构
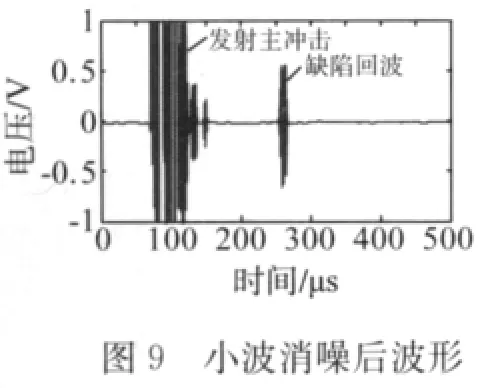
利用Mallat合成算法对经阈值处理后的小波系数进行重构,得到重构后的波形如图9所示。与图3所示的原始信号对比可见,经小波变换后,噪声得到显著抑制,缺陷回波清晰可见。

2.2 包络提取
提取包络能够使信号变得光滑平缓,便于检测缺陷回波时间以及进行超声成像。采用希尔伯特变换提取信号包络,该方法是从噪声中提取有用信号的一种有利工具,对于提取电磁超声回波信号这样的窄带载波信号的包络是十分有效的。
函数f(t)的希尔伯特变换被定义为:

f(t)的解析信号可写为:


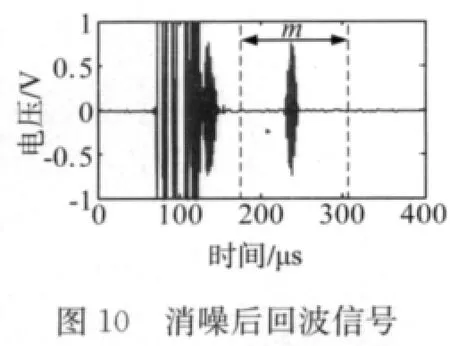
利用希尔伯特变换直接提取图10所示信号的包络,结果如图11所示。
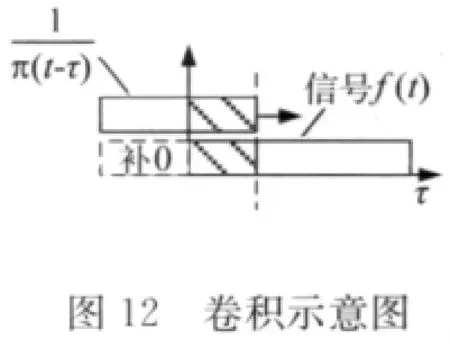
结果显示,得到的信号包络两端偏离原始信号。分析可知,导致该现象产生的原因如下:式 (1)表明,函数f(t)的希尔伯特变换是其与1/πt的卷积。对于信号的前端,由于截断而呈阶越状态,计算卷积的过程中,当乘积项不足时,补0代替,有效部分仅为图12中阴影部分,致使包络偏离,随着阴影面积的增大,偏离将逐渐减小[5]。
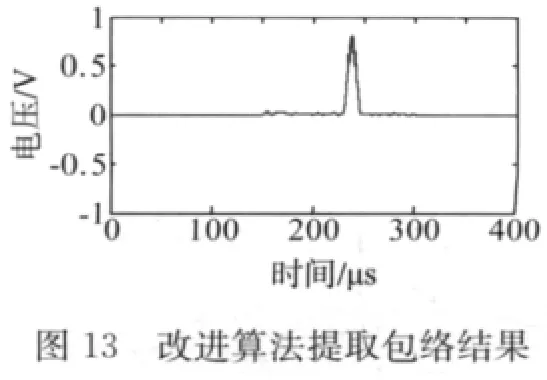
针对该问题,对算法做了适当的修改,选取采集信号中间的一段,如图10中的m段,仅对该段进行希尔伯特变换,提取信号包络,提取结果如图13所示,有效地避免了偏离现象的产生。
2.3 幅值调节
在检测过程中,探头沿钢轨踏面长度方向扫查,探头到缺陷的声程会随着探头的移动而改变,这将造成探头在不同位置对同一缺陷检测的回波信号幅值不同,不利于缺陷量化。因此,需设计一种幅值调节算法,使探头移动过程中对同一缺陷进行检测的回波信号幅值相等。
用图1所示的检测系统检测图2中加工的钢轨踏面裂纹。移动探头,采集不同距离下对应的缺陷回波,并通过上述消噪和包络提取处理后计算得到信号幅值。利用Matlab软件自带的cftool曲线拟合工具箱进行曲线拟合,得到的距离幅度曲线如图14所示。
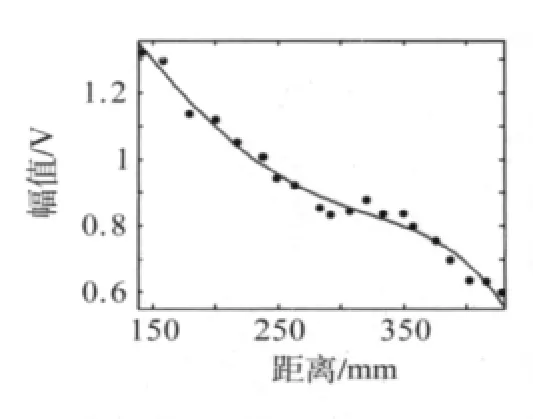
图14 距离-幅度曲线
根据距离-幅度曲线计算得到时间增益表,上位机检测到缺陷回波时间后,通过查表计算得到与之对应的增益值,作用于采集到的回波数据,实现幅值调节。
2.4 超声成像
EMAT探头沿钢轨长度方向扫查,每隔300 mm采集一组回波数据,对其进行小波消噪、包络提取、幅值调节等处理后,以探头的起始位置为原点,按各数据距原点的距离将多组数据存放在一个大的数组中,对于不同组数据之间数据重叠的部分,取多组数据的平均值。随后,将数组中的回波数据用图15所示的灰阶表示,即得到沿钢轨长度方向的踏面超声图像。

图15 调色板
3 上位机数据分析软件
上位机数据分析软件采用LabWindows/CVI和Matlab混合编程的方式编写,总体软件流程框图如图16所示,实现对检测系统的参数设置,超声回波数据的采集、处理、分析、显示等功能。

图16 总体软件流程框图
用图1所示的系统检测包含裂纹的钢轨踏面,裂纹长30 mm,深1 mm。运用该软件处理采集到的回波数据,上位机显示界面如图17所示。波形从上至下依次是缺陷回波原始波形、经小波消噪后的波形以及钢轨踏面的超声图像。对比可见,经小波消噪后的波形信噪比得到了显著提高,缺陷回波清晰可见。沿钢轨长度方向的超声图像直观地呈现了钢轨踏面的检测状态。利用超声波传播速度和传播时间可以计算得到超声回波信号的声程,从而对缺陷进行定位。通过图17所示的超声图像以及缺陷位置识别部分可以看到系统检测到的缺陷到探头的距离是244.5 mm,与实际距离250 mm基本一致。
4 结论
研究了钢轨踏面电磁超声检测信号的处理方法,采用小波变换对电磁超声回波信号进行消噪处理,显著提高了回波信号的信噪比;利用希尔伯特变换有效提取了信号的包络;沿钢轨长度方向对钢轨踏面进行成像,使显示更加直观,有利于缺陷检测。
[1]Edwards R,Dixon S,Jian X.Characterisation of defects in the railhead using ultrasonic surface waves[J].NDT&E International,2006(39):468-475.
[2]Chahbaz A.Development of a Mobile Inspection System for Rail Integrity Assess ment[R].Transportation Development Centre Safety and Security Transport Canada,2000(6):3-10.
[3]Vitaly I,Alexander V.Development of instr u ments for NDT of rail-tracks with use of contactless electromagnetic acoustic emission transducers(EMATs)[C].17th World Conference on Nondestructive Testing,Shanghai:Chsndt,2008:255-262.
[4]Kang Lei,Mi Wujun,Lu Chao,el al.Research on weak signal detection technique for electro magnetic ultrasonic inspection system[C].The 3rd IEEE Conference on Industrial Electronics and Applications,Singapore,2008:Inst of Elec and Elec Eng Computer Society,2008.
[5]张晓颖,马书林.数字包络的实现[J].长春理工大学学报(自然科学版),2008,31(2):118-120.
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
科技风(2021年19期)2021-09-07
中南大学学报(自然科学版)(2021年4期)2021-05-17
科学家(2021年24期)2021-04-25
电子制作(2019年13期)2020-01-14
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27
中国铁道科学(2015年6期)2015-06-21
中国铁道科学(2015年5期)2015-06-21
中国铁道科学(2015年4期)2015-06-21
