反光镜测试中曲面数据采集及拟合*
2012-03-20 04:29王银河阴晓俊姚春龙刘新华战俊生朱德金
光学仪器 2012年3期
王银河,阴晓俊,姚春龙,刘新华,战俊生,朱德金
(沈阳仪表科学研究院 沈阳汇博光学技术公司,辽宁 沈阳 110043)
引 言
非球面光学反光镜按照面型分类包括椭圆、抛物面、双曲面等类型,广泛应用于数字投影系统[1]、冷光源[2]、电影光源[3,4]、照明光源[5]等,其几何外形结构如图1所示。其中应用于数字投影系统中的椭球反光镜,如图2所示,是一种较为精密的反光镜元件。实际加工过程中,需要对未知椭球曲面方程进行重构求解,以便进行数据误差分析及再加工。曲面重构的主要方法是通过采集曲面的坐标数据信息及数据拟合,得到非球面曲面方程。曲面的数据采集及拟合一方面有助于光学系统辅助设计,另一方面作为制造过程的误差分析,模拟模型的光学特性变化,可以提升产品制造精度及性能。

图1 非球面反光镜示意图Fig.1 Schematic of aspherical reflector

图2 数字投影系统中非球面反光镜Fig.2 Spherical reflector in digital projection systerm
1 非球面反光镜的加工及面型检测
1.1 非球面反光镜加工
非球面反光镜制造过程主要采用模压成型及机械精密研磨成型两种加工方式。其中,模压成型方法主要用于小尺寸反光镜加工,如应用于小功率投影机光源系统的反光镜;机械研磨成型加工主要用于大型非球面反光镜的加工,加工过程也更加复杂,周期更长。加工工艺如图3、图4所示。在这些精密反光镜生产的过程中,经常要通过精密的测试和计算来提升反光镜的加工精度,减少制造误差。非球面反光镜面形检测方法主要有接触式测量及非接触式的测量。测量方法包括三坐标测量机、轮廓仪、样板测试、几何光学方法、光电方法测试等。其中三坐标测量机测试方法,以其高精度的定量测量方式已在非球面检测领域得到越来越广泛的应用[6-8],也是非球面反求工程中实用性好的一种重要方法。

图3 反光镜数控研磨加工示意图Fig.3 Schematic of reflector grinding with computer numerical control

图4 反光镜模压成型示意图Fig.4 Schematic of reflector molding
1.2 三坐标面型检测
1.2.1 反光镜测试检测路径及基准定标
非球面检测路径可采用以下三种方法:子午线法、光栅式检测路径和圆周式检测路径[9]。这里采用子午线方法进行测量。利用测试设备测量一条经过轴对称光学元件对称轴的子午线,如图5所示,沿子午线及轴线所在平面剖开椭球形成截面,测试截面与中心位置的相对坐标,如图6所示,再通过数学方法拟合数据。使用三坐标测量机测试非球面光学元件须先选择一个基准面,以便进行坐标变换及数据分析。由于在反光镜加工过程中,上端面与反光镜中轴垂直,所以选择上端面作为基准面比较准确,如图6所示。选择非球面反光镜上端面作为基准水平面,沿水平端面测试反光镜上端内表面不同位置坐标,再根据测试数据找到圆心及中轴线。
1.2.2 数据采集
沿轴向方向,选择一个轴截面作为测试平面,用三坐标测试机测量截面的位置坐标。测试坐标的中心选择在上端面中心,测试过程采集足够的数据点,一般根据反光镜大小采集200~300个坐标点即可。由于测试曲面为未知曲面,因此测试坐标点均为相对空间坐标。

图5 椭球的子午线式测量检测路径Fig.5 The meridian measurement path of ellipsoid test

图6 反光镜三坐标测试示意图Fig.6 Schematic of reflector test with CMM
2 曲面数据拟合及分析
2.1 非球面曲面构造
由于测试的数据均为相对位置坐标,须根据测试中的空间位置关系,转换为接近于曲面方程坐标系下坐标点(xi,yi,zi),再根据测试的数据建立坐标系,采用三维绘图软件重构图形如图7所示。
2.2 参数方程拟合
曲线拟合:基于最小二乘的数学拟合方法在实际计算中应用较多[10-12]。高斯—牛顿算法最小二乘拟合[13,14]的出发点就是 先通过模型进行线性近似,求出近似模型的最小二乘估计,然后再进行迭代程序。利用泰勒基数展开近似非线性方程,将其表示成线性形式,计算出参数沿着残差减小方向上的新估测值。
设有t个回归因子和n个待定系数B,则非线性模型表示为:

图7 根据坐标点三维模型重构Fig.7 3-D model reconstruction based on the coordinates

在参数拟合计算中,通过测量数据点(xj,yj)来估计待定系数bi(i=1,2,…,n),把现有的回归模型参数b0i作为近似值,将最优bi与b0i的差值记为Δbi,这样参数bj的优化问题就转化为确定修正因子Δbi即

B0按照泰勒级数展开并取其一次项,并按照未知数Δbi合并同类项,得到新方程组[14],解此方程可求的参数的修正值为Δbj,再由式(2)得到修正值。需要经过多次迭代计算,使Δbj趋近于零。按照椭圆曲线方程编制程序进行最小二乘数据拟合计算。
2.3 曲面拟合及误差分析
利用上述三坐标测试方法采集了一组椭球反光镜内曲面坐标点。反光镜的具体尺寸如下:曲面外径为173mm,高度为53mm,根据2.2中最小二乘拟合方法进行计算。通过上述数据拟合,计算得到椭圆方程a=161.47,b=109.44,c=118.72,将坐标平移后测试的坐标点转换成标准椭球方程坐标系下的数据,测试坐标点与拟合椭圆曲线如图8所示。
曲面拟合误差:通过沿Y方向计算测试点坐标与标准方程的误差对比,如图9所示,除反光镜的边缘位置点出现明显偏离外,偏差值均在±0.02mm的范围内,符合反光镜测试及制造精度要求。
2.4 焦点误差模拟分析
将测试构造的反光镜转换为三维实体模型,F1、F2分别为第1、2焦点,f1、f2为第1、2焦距。进行光线追迹,通过光线追迹分析,若构造曲面与拟合曲面偏差较小,则在F2焦点处接收光能量具有最高值。参考拟合曲面所得到方程及焦点位置,将光源置于焦点F1处,在F2附近移动接收面,通过接收面接收到光线数量及能量分布变化,分析模型f2误差,如图10所示。模拟的设置如下:f1=42.7mm;f2=280mm,接收面半径为5mm。通过移动接收屏,记录接收的平均光能量值及入射光线数,寻找最高能量值点坐标值,确认f2值的偏差。图11中最高点位置坐标为274mm,参考坐标为280mm,F2偏差为6mm。

图8 平移后坐标点与拟合曲线Fig.8 Coordinates and fitted equation after shift
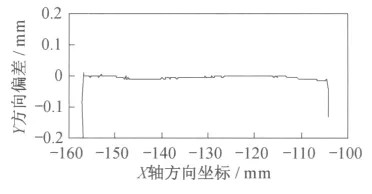
图9 坐标点与拟合曲线方程Y方向偏差Fig.9 Deviation of Ybetween coordinates and fitted equation
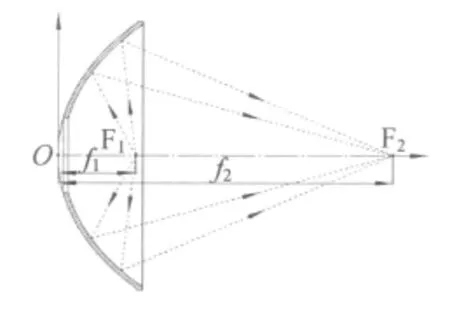
图10 光线追迹示意图Fig.10 Schematic of ray-tracing

图11 面F2不同位置处接收能量关系Fig.11 Energy at different locations on F2
3 结 论
利用三坐标测试设备进行反光镜曲面数据采集,采用数学拟合的方法得到近似曲面方程。通过对拟合方程与测试坐标点数据的对比分析,误差较小;通过对拟合曲面及测试坐标点重构曲面的光线追迹分析,第二焦点虽有较小偏差,但光能量变化不大。采用上述反光镜测试拟合方法,对于提升精密反光镜加工精度,减少加工误差,是一种行之有效的方法。
[1]WERNER W B,DEWALD D S.Application of DLP technology to digital electronic cinema-A progress report[C]∥140thSociety of Motion Picture and Television Eengineer(SMPTE)Technical Conference.Pasadena:Calif,1998:1-7.
[2]萧泽新,安连生.冷光源的设计[J].光学技术,1996,22(5):38-41.
[3]陶友石.深椭球冷膜反光镜在放映机光学系统中的应用[J].影视技术,2004(4):58-63.
[4]刘新华,孟祥顺,赵盛宇.椭球电影反光镜的光学设计原理[J].现代电影技术,2006(7):39-42.
[5]陆汉民.均匀照明系统的设计与应用[J].光学仪器,1990,12(4):32-39.
[6]马正元,王慧军,何 龙.三坐标测量机在自由曲面反求工程中的应用[J].沈阳工业大学学报,2004,26(2):121-123.
[7]公茂才.三坐标测量及的数据处理和分析[J].中国测试技术,2007,33(4):53-55.
[8]谢高荣.非球面镜片的面型检测技术综述[J].光学仪器,2007,29(2):87-90.
[9]郭隐彪,郭 江,王振忠.非球面检测路径与高精度曲线拟合算法研究[J].中国机械工程,2008,19(10):1201-1204.
[10]韦博成.近代非线性回归分析[M].南京:东南大学出版社,1989:13-23.
[11]欧阳明松,徐连民.基于 MatLab的试验数据拟合[J].南昌工程学院学报,2010,29(4):24-28.
[12]许正文,姚连璧.基于稳健估计的直接最小二乘椭圆拟合[J].大地测量与地球动力学,2008,28(1):77-80.
[13]沙定国,全书学,朱秋东,等.光学非球面面型拟合方法研究[J].光子学报,1995,24(2):152-157.
[14]罗玉峰,崔远来,朱秀珍.高斯—牛顿法及其在作物水分生产函数模型参数求解中的应用[J].节水灌溉,2004(1):1-8.
猜你喜欢
导航定位学报(2022年2期)2022-04-11
诗歌月刊(2022年2期)2022-03-15
制造技术与机床(2017年9期)2017-11-27
北京航空航天大学学报(2017年3期)2017-11-23
航天制造技术(2016年6期)2016-05-09
第二课堂(课外活动版)(2015年3期)2015-10-21
中国塑料(2015年9期)2015-10-14
组合机床与自动化加工技术(2014年12期)2014-03-01
中国光学(2012年3期)2012-10-30