潜艇深度终端滑模控制技术
2012-03-07 06:22夏极胡大斌
舰船科学技术 2012年2期
夏极,胡大斌
(海军工程大学船舶与动力学院,湖北武汉 430033)
0 引言
潜艇垂直面操纵运动是指只改变深度和纵倾,而不改变潜艇航向的航行运动。与潜艇水平面操纵运动单输入单输出不同,潜艇垂直面操纵运动是一个多输入多输出的过程,首尾两对舵同时影响深度和纵倾的变化,使得深度和纵倾2个通道相互耦合,互相干扰,一般通过解耦控制将潜艇双输入双输出系统转换为2个单输入单输出系统,首舵主要控制深度,尾舵主要控制纵倾,然后分别设计控制器控制,从而达到潜艇深度操纵的目的。潜艇垂直面操纵运动的强非线性、强耦合性要求控制器具有良好的鲁棒性。各种强鲁棒性的控制方法得到广泛应用,何斌[1]采用ADRC方法设计潜艇深度控制器,得到良好的控制效果。牟军[2]首先开展了基于线性模型的潜艇深度滑模变结构控制研究,由于采用传统线性滑模面,系统渐近收敛。王先洲[3]采用ADRC设计首舵控制律,避免人为确定潜艇转换深度的麻烦,采用变结构控制设计尾舵控制律,利用二者良好的鲁棒性,提高了系统控制性能。为提高线性滑模面的收敛速度,使系统达到有限时间收敛,终端滑模控制[4]被提出并得到广泛研究。本文基于潜艇垂直面非线性操纵模型,采用首舵控制深度,尾舵控制纵倾,分别设计终端滑模控制器并进行仿真。设计过程中,忽略首舵和尾舵对彼此的耦合影响,由此带来的不确定性通过滑模控制的强鲁棒性来克服。仿真结果表明,该系统具有良好的控制性能和较强的鲁棒性。
1 潜艇深度控制模型
潜艇垂直面控制系统主要由垂直面操纵运动非线性模型、首舵模型、尾舵模型和首尾舵控制器组成。
1)潜艇垂直面操纵运动模型
本文采用国际水池会议(ITTC)推荐和造船与轮机工程学会(SNAME)术语公报的坐标体系,各参数意义符合其定义,潜艇垂直面运动非线性模型[5]为:


2 控制器的设计
潜艇垂直面控制中,纵向速度u仍由推进系统控制,在推进速度控制良好的条件下,可以认为水平面操纵运动的纵向速度u保持不变;若不对速度进行控制,则在保持主推进电机转速恒定的条件下,纵向速度u可由式(2)中第1个等式决定。本文的设计中,假定系统推进系统控制良好,不考虑纵向速度的控制问题,设计目标为设计δsc和δbc,使得潜艇深度快速从初始深度ζ跟踪到指定深度ζc,同时满足纵倾角控制要求。
采用首舵控制深度,尾舵控制纵倾,分别设计控制器,将首舵视为纵倾控制的干扰,而将尾舵视深度控制的干扰,忽略首舵和尾舵对彼此的耦合影响,由此带来的不确定性通过滑模控制的良好鲁棒性来克服。
首先设计首舵深度控制器。
3 仿真实例
采用文献[7]中的潜艇六自由度运动模型水动力系数进行仿真研究。参数为k1ζ=0.01,k2ζ=1,l1ζ=0.33,k1θ=0.01,k2θ=1,l1θ=0.33。终端趋近律参数设计为k3ζ=0.005,k4ζ=0.000 01,l2ζ=0.33,l3ζ=1.1,k3θ=0.005,k4θ=0.000 01,l2θ=0.33,l3θ=1.1。假设推进系统控制良好,航速维持uc=6 kn,初始深度ζ0=100 m,设定深度ζd=10 m,纵倾角设定为θ=5°,初始时潜艇已均衡好。仿真结果见图1~图4。图1和图2为深度和纵倾变化曲线,可知深度快速无超调趋近设定深度,到达设定深度后潜艇能沿期望深度稳定航行,且纵倾满足限制条件。图3和图4为首尾舵响应曲线,表明系统操舵合理,控制性能良好。
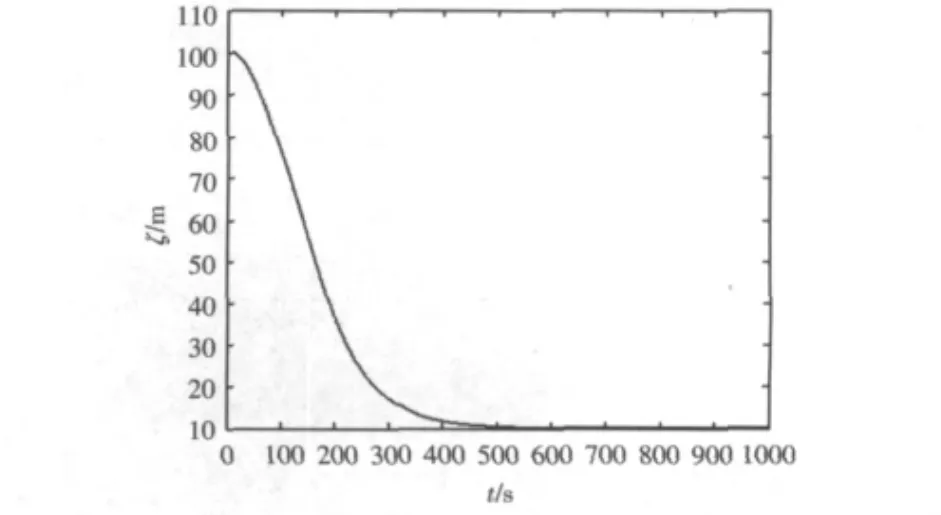
图1 深度响应曲线Fig.1The response curve of depth
为考察系统鲁棒性,假设系统模型部分参数摄动,f2=f2×0.8,f3=f3×1.5,控制参数及初始条件不变。仿真结果如图5~图8。图4和图5为深度变化曲线,可知深度仍能快速无超调趋近设定深度,到达设定深度后潜艇能沿期望深度稳定航行。图7和图8为首尾舵响应曲线,与标称系统控制相比,首尾舵响应变化不大,表明系统操舵合理,且没有明显的抖振,系统控制具有较强的鲁棒性。


4 结语
本文基于潜艇垂直面非线性模型,忽略首尾舵之间的耦合,采用首舵控制深度,尾舵控制纵倾角,分别设计终端滑模控制器并进行仿真研究。仿真结果表明,系统在很好满足纵倾角设定要求的同时快速改变深度,且系统具有很强的鲁棒性,说明终端滑模控制器具有优良控制性能。由于采用了终端趋近律,解决了系统控制不连续的问题,从而消除控制抖振问题。该方法设计过程简单明确,符合操纵者的操纵习惯,因此该方法具有良好的推广意义。
[1]何斌,徐亦凡.自抗扰控制器在潜艇近水面航行深度控制中的应用[J].船海工程,2008,37(3):131-134.
HE Bin,XU Yi-fan.Application of ADRC in depth control of submarinenearfree-surface[J].Ship&Ocean Engineering,2008,37(3):131-134.
[2]牟军.潜艇操纵运动的变结构控制系统研究[D].武汉:华中理工大学,1997.
MOU Jun.Variable structure control for the maneuvering of a submarine[D].Wuhan:Huazhong University of Science and Technology,1997.
[3]王先洲.船舶及潜艇操纵中的鲁棒控制研究[D].武汉:华中科技大学,2006.
[4]ZAK M.Terminal attractors in neural networks[J].Neural Networks,1989,(2):259-274.
[5]施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[6]LI Tie-shan,YANG Yan-sheng.Robust dissipative designs for straight-line tracking control of underactuated ships[C].Hangzhou P.R.China:Proceedings of the 5thWorld Congress on Intelligent Control and Automation,2004.548-552.
[7]BABAOGLU O K.Designing an automatic control system for a submarine[D].Monterey,California,USA:Naval Postgraduate School,1988.
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18
农业机械学报(2020年2期)2020-03-09
汽车维修与保养(2019年7期)2020-01-06
太原科技大学学报(2019年3期)2019-08-05
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
电脑知识与技术(2016年28期)2016-12-21
北京航空航天大学学报(2016年7期)2016-11-16
科技视界(2016年16期)2016-06-29
北京航空航天大学学报(2016年4期)2016-02-27