新型电传动车辆驱动控制系统设计
2012-02-22 08:08:30颜南明张豫南王和源胡国庆
兵工学报 2012年2期
颜南明,张豫南,王和源,胡国庆
(1.装甲兵工程学院 控制工程系,北京100072;2.浙江信阳实业有限公司,浙江 金华321025)
0 引言
目前,车辆电传动技术越来越受到人们的关注,世界各国的汽车厂商和科研院所都在开展电传动车辆的研究和产品开发,经过一百多年的发展历史,各种各样的电传动样车和产品相继出现,如电瓶车,电传动轿车,电传动公共汽车、电传动军用车辆和各种电传动特种车辆等。从采用的传动方案和使用的技术来看,这些电传动车辆中一部分如电瓶车、工业搬运车辆,为了降低成本,一般以铅酸蓄电池为唯一动力源,采用低压直流电机作为驱动电机,车辆结构简单,成本低廉。这种车辆行驶里程短,由于采用直流电机,车辆需要维护的工作较多,可靠性也不高。电传动车辆中另一部分车辆如电传动小轿车,公共汽车等,采用内燃机和电池(如燃料电池以及锂电池等二次电池)为动力源,车辆除了可以以电机驱动外,内燃机还可以以机械传动的方式为车辆提供动力,在这种类型的电传动车辆中,电传动只是一种辅助的方式,其目的是节能减排,技术复杂,成本高。电传动车辆中的军用车辆,在所有的电传动车辆中技术最为复杂,技术风险也大,其有限的车内空间和特殊的车辆性能要求使得电传动技术在该领域的发展一波三折。目前国外的电传动军用车辆向轻型、轮式车辆发展并采用多轮驱动的结构形式,采用多轮驱动不仅可以提高整个传动系统的效率,还能降低技术风险。如采用多轮驱动时可以通过控制工作电机的个数使电机大部分时间工作在效率最佳的区域,采用多轮驱动可以降低电机的设计难度。在国内,军用车辆电传动技术的发展刚刚起步,电传动方案几乎都采用两个驱动电机的双侧电机方案和机电传动方案[1],在动力源上采用内燃机或者内燃机与二次电池的组合。基于该情况,本文提出一种4 ×4混合电传动方案,并对其驱动控制系统进行了设计,实验结果证明,本文的设计是可行的。在实车的研制中已经得到应用。
1 混合电传动总体方案
整个混合电传动方案结构图如图1所示。发动机-发电机发出三相高压交流电后经过功率变换系统,可向车外提供380 V/220 V 交流电和48 V/24 V 直流电,这种多制式电源在战场的保障作用是非常重要的,可为作战指挥所提供设备、照明供电的同时,还可作为装甲车辆的应急起动电源使用。整个方案的控制系统分为发动机-发电机组控制器、转向助力电机控制器、驱动电机控制器和综合控制器组成,各个控制器之间通过CAN 总线实现数据的实时交互。在人机交互方面,整个控制系统具有三种操控模式,称之为方向盘驾驶模式,手柄驾驶模式和遥控驾驶模式,驾驶模式通过模式选择开关相互切换。方向盘模式符合普通人习惯,驾驶方便,可平时使用;在战时需要良好机动性如中心转向功能时可使用手柄操作模式;而在危险路况如有敌人火力封锁时,可使用遥控驾驶模式。各种驾驶模式的具体操作和运行情况在控制系统设计部分再做详细描述。遥控驾驶模式下,无线通信系统和车辆控制系统通过RS232 实现数据交互。

图1 混合电传动方案结构简图Fig.1 Diagram of hybrid drive scheme
2 电传动系统主要部件匹配计算
电传动系统主要部件匹配计算是电传动车辆性能的重要保证,也是控制系统设计的前提。主要包括驱动电机、逆变器、发动机-发电机组的相关参数匹配计算。在电传动系统中,牵引电机不但要满足车辆以最高车速行驶的要求,同时还必须满足车辆以最大恒转矩加速、爬坡和转向的要求,因此对电机进行匹配计算,使得电机满足要求且实现体积、重量最小是匹配计算的关键。本文以驱动电机的匹配计算为基础,利用从后往前的递推计算,完成整个传动方案的匹配计算。表1为本文进行驱动电机参数匹配计算时参考车辆的设计参数和性能参数。

表1 驱动电机参数匹配计算时的设计指标Tab.1 Reference data for matching calaculation of drive motor
针对表1中的要求,驱动电机的匹配计算主要包括电机的额定功率、最高转速、最大扭矩、额定转速和额定转矩等的匹配计算。首先进行电机的额定功率计算[5],车辆行驶中所需要的功率和能量取决于它的行驶阻力,而车辆稳定行驶时受到的阻力主要包括车轮阻力(FR)、空气阻力(FW)和坡度阻力(FS).车轮阻力主要与滚动阻力系数有关,不同路面的滚动阻力系数不同,考虑越野车的行驶环境,本文滚动阻力系数取0.03.空气阻力与车速v,空气密度ρ,迎风面积A 有关,本文实验车辆速度较低,暂不考虑。电机持续输出的功率

将本文参数代入(1)式可得电机功率为6.8 kW.计算电机的转矩输出能力时需要考虑电机满足电传动车辆动力因素、最大爬坡度要求,而动力因数的条件最为苛刻,因此笔者仅从动力因数方面来计算,电机最大输出扭矩为

式中:D 为车辆直驶动力因素;m 为车辆质量;g 为重力加速度;i 为车辆侧传动比;rz为主动轮半径。将m=1 000 kg,i =10.5,rz=330 mm,D =0.7 代入上式可得电机最大输出扭矩为215.6 N·m.而要满足车辆的最大行驶速度要求,电机最高转速nmax需要满足

将vmax=70 km/h,i =10.5,rz=330 mm 代入公式可得nmax≥5 908 r/min。综上分析,可选择如下参数的驱动电机。

表2 驱动电机参数Tab.2 Parameters of drive motor
之所以取电机额定功率为4 kW,是为了使电机满足大扭矩、宽调速范围的要求,同时在负载较轻的时候可进行车辆的两驱行驶,提高单个电机的工作效率。计算了驱动电机的功率后,在此基础上可选择发电机功率15 kW,发动机功率20 kW.
3 电传动驱动控制系统设计
驱动控制系统要实现电子差速控制[4],并通过仪表系统将车辆状态显示出来,其设计主要包括助力电机的控制、驱动电机的控制、发动机-发电机组的控制以及整车的综合协调控制。在本文提出的驱动控制系统设计方案中,发动机-发电机组、转向助力电机以及四个驱动电机采用独立的控制器,它们在综合控制器的控制下协调工作[5],其工作框图如图2所示。
在人机交互方面,整个驱动控制系统具有方向盘驾驶模式,手柄驾驶模式和遥控驾驶模式三种操控模式,驾驶模式通过开关相互切换。各种驾驶模式的具体操作和运行情况如下。
3.1 方向盘驾驶模式
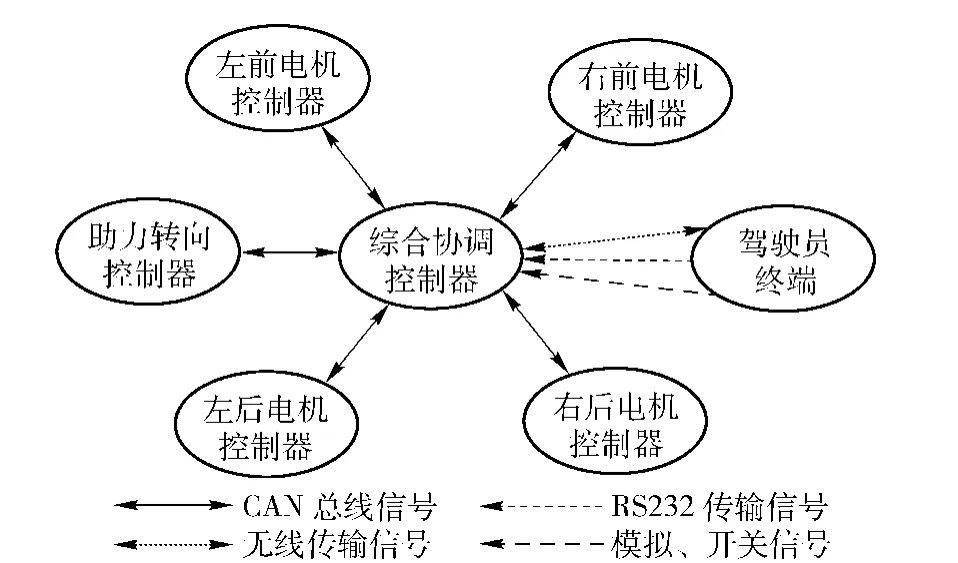
图2 混合电传动方案驱动控制系统结构简图Fig.2 Control system construction Diagram of hybrid drive scheme
驾驶员通过方向盘、加速踏板、制动踏板和其他开关信号来驾驶车辆;在这种驾驶模式下,驾驶员踩下加速踏板时,车辆加速行驶,在行驶过程中助力转向控制系统将前左右轮的摆角实时反馈到综合控制器中,综合控制器通过编程实现车辆转向时的电子差速运算,运算结果控制四轮速度来实现车辆的平稳转向。当驾驶员松开加速踏板时,车辆滑行,此时电驱动系统的电制动强度为零。当驾驶员踩下制动踏板时,机械制动和电制动一起作用,制动踏板被踩得越深,机械制动和电制动作用越强。
3.2 手柄驾驶模式
驾驶员通过三轴霍尔手柄和其他开关信号来驾驶车辆;在这种驾驶模式下,车辆的制动方式与方向盘驾驶模式相同,不同的地方在于车辆的转向控制方式。此种模式下,车辆方向盘锁在中间位置,即前左右轮的转向摆角均为零,控制系统通过控制左右侧驱动轮的速度实现车辆转向,除了正常的车辆转向外,此种模式下还可以实现车辆的原地转向功能。
3.3 遥控驾驶模式
驾驶员不在车上,通过遥控发射终端控制车辆的运动。该驾驶模式下电传动系统的电制动作用在车辆减速和制动过程中均以最大制动能力工作。其运动情况和手柄驾驶模式相同。
4 试验验证和结果分析
根据上面的研究结果,本文对提出的方案、匹配计算结果和设计的控制系统进行样机试验。图3为控制系统实验室空载试验情况和试验的实际样车,图4为控制系统实验室空载试验左转向、车速10 km/h,转角为0~30°时对应四轮驱动电机的理论转速[2]和实际转速比较情况,从实验结果可知,实际结果与理论数值误差小于2%,控制效果稳定,满足实际应用要求。造成误差的原因主要来源于转向角度以及电机转速的测量。除了实验室验证控制系统的差速算法外,利用图3中的实际样车,对控制系统的三种驾驶模式、样车的加速性能、油耗、爬坡性能、最高车速等性能以及样车的供电能力也做了相关试验,试验结果优于前面的设计指标。

图3 控制系统空载实验及试验实车图Fig.3 Actual picture of control system in no load experment and actual vehicle
5 结论
1)4 ×4 混合电驱动样车满足匹配计算时的设计要求,0~32 km/h 加速时间小于4 s,具有良好的机动能力。
2)设计的基于CAN 总线网络的多轮电驱动控制系统不仅具备电子差速功能,且提供多种不同制式的保障电源和三种操控模式,能够很好的满足军用车辆多功能等特殊具有良好的操控性和可靠性,
3)研究成果可为以后的多功能作战平台提供技术基础。如在样车上安装侦查、打击等设备,可将样车开发成侦查或直接打击平台。

图4 电子差速中驱动电机转速理论值与实际值比较结果Fig.4 Comparison of theoretic and experiment speed of motor in electric differential station
References)
[1] 颜南明.履带装甲车辆电传动技术初探[J].兵工学报,2004,25(5):619-623.YAN Nan-ming.Research on technology of electric drive of armered tracklayer[J].Acta Armamentarii,2004,25(5):619-623.(in Chinese)
[2] 袁仪.电动汽车转弯电子差速的解决方案综述[J].上海汽车,2009,36(3):2-5.YUANG Yi.A summarize of solution on the differential problem of EV during turning[J].Shuanghai Auto,2009,36(3):2-5.(in Chinese)
[3] 黄伟.采用CVT 的四轮驱动混合动力车传动系统控制策略的研究[J].汽车工程,2008,30(6):501-505.HUANG Wei.A study on driveline control strategy of the fourwheel drive hybrid electric vehicle based on CVT[J].Automotive Engineering,2008,30(6):501-505.(in Chinese)
[4] 周云山.汽车电子控制技术[M].北京:机械工业出版社,2003:234-249.ZHOU Yun-shan.Automobile electronic control technology[M].Beijing:China Machine Press,2003:234-249.(in Chinese)
[5] Zhang Y,Xie Y H.Modeling,Control and analysis of mover for an electric transmission system of tracked vehicle[C]∥Military Vehicle Advanced Propulsion System Technology.Pennsylvania:US Army TACOM,2005:1550-1554.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31 07:01:16
车主之友(2022年4期)2022-08-27 00:58:12
物流技术与应用(2022年8期)2022-08-26 04:10:54
汽车实用技术(2022年10期)2022-06-09 11:16:54
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
物流技术与应用(2020年4期)2020-05-06 03:31:28
经济技术协作信息(2020年30期)2020-02-28 17:32:10
铁道通信信号(2019年4期)2019-10-10 03:42:56
中国自行车(2018年8期)2018-09-26 06:53:30