车载电子机柜的缓冲设计
2012-02-18 08:35朱继元
装备制造技术 2012年4期
朱继元
(桂林电子科技大学信息科技学院,广西 桂林 541004)
高科技战争越来越依赖于电子技术,为了满足电子系统的高度集成化要求,电子设备的结构设计广泛采用了柜式结构。这种结构造价低廉,安装简便,并且和插入组件易于配合。在车载的环境下,由于地面的凸凹不平,使结构受到振动冲击作用,从而使电子机柜结构疲劳和强度下降。有文献报道了在一些雷达电子设备中,冲击引起的故障约占振动引起故障的1/4。
为了克服冲击对电子机柜的破坏,工程实际中常常是通过对电子机柜进行加固设计和采用缓冲设计,来保证电子机柜的正常工作。加固设计的成本通常较高,而采用缓冲设计,不但可以有效地抑制冲击的破坏作用,而且调整方便,工作可靠,成本经济,因而在生产实践中应用较为广泛。
1 电子机柜的理论模型
如图1所示,为电子机柜的结构图,电子机柜的总质量为m、隔振器的弹簧刚度为k、阻尼为c,如果仅考虑垂直方向的振动特性时,便可以将其简化为如图2所示的力学模型[1],其力学模型为一个质量m、一个线性阻尼元件c和一个线性弹簧k组成的单自由度系统。

图1 电子机柜的结构图
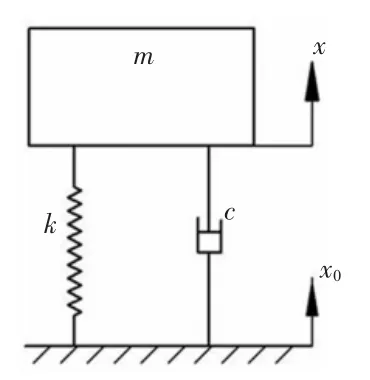
图2 电子机柜的力学模型

从而得电子机柜的位移[1]
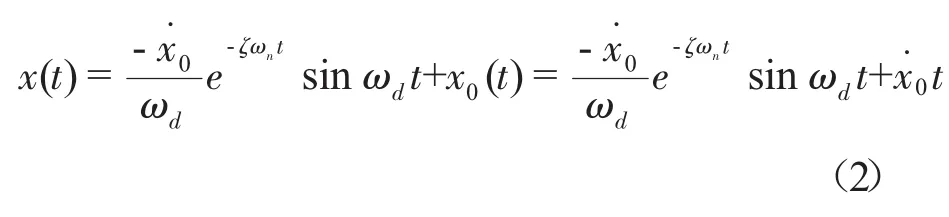
由式(2)可得电子机柜的位移
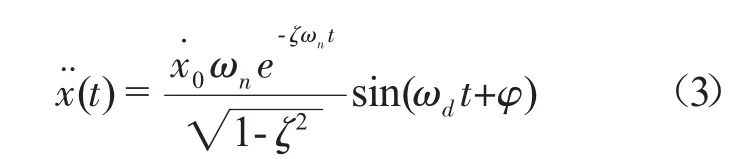
式中,
2 电子机柜的无阻尼缓冲设计
当电子机柜的阻尼为0时,阻尼比为ζ=0,此时式(1)和式(3)可化为
于是最大变形量和最在加速度可表示为
由式(7)可知,如果输入的阶跃速度不变,系统的固有频率越低,则电子机柜所受到的冲击加速度越小,此时缓冲效率也越高;但由式(6)可知,输入的阶跃速度不变,系统的固有频率越低,缓冲系统的最大变形量就越大。由此可知,缓冲效率高而变形量小的缓冲系统是不存在的,提高缓冲效率是以增大变形量为代价的,为了取得良好的缓冲效果,缓冲系统要能产生较大的变形,容许电子机柜产生较大的相对位移。
但由于工作性能及结构要求或受空间的限制,电子机柜不容许产生较大的相对位移,在这种情况下,如果满足变形条件,缓冲效率就受到了限制,如果此时缓冲效率满足不了设计要求,就不能用上述方法来进行缓冲设计,必须采用其他方法或将缓冲系统设计成非线性的[4]。
3 电子机柜的阻尼缓冲设计

可以求得出现最大加速度幅值的时刻tmax,

将式(10)代入式(8)和式(9)可得
由式(11)和式(12)可知,当输入的阶跃速度不变时,当阻尼比为一确定值时,最大变形量是固有频率的函数,当取阻尼比为0.4时,这时,可以得到如图3和图4的曲线图。
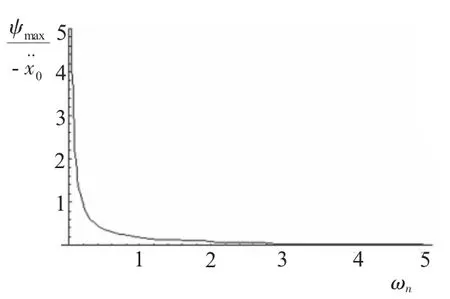
图3 最大变形量随固有频率变化曲线图
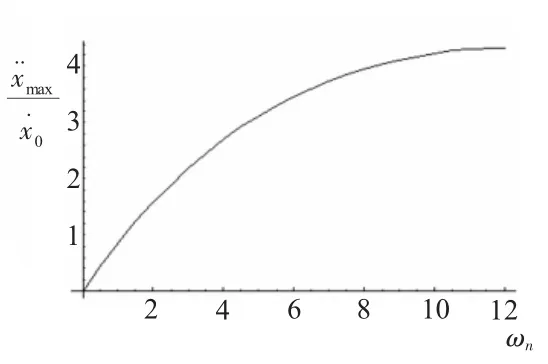
图4 最大加速度随固有频率变化曲线图
由图3和图4可知,当输入阶跃速度和阻尼比不变时,最大变形量随固有频率的增大而减小,而最大加速度随固有频率的增大而增大,这和无阻尼的情况一致。这意味着较小冲击传递率的情况下,缓冲系统的变形往往满足不了条件,满足了缓冲变形条件,又得不到最理想的传递率。所以在进行电子机柜缓冲设计时,在满足缓冲的变形条件下,设计机柜的刚度和强度。
为了讨论阻尼比对最大变形量的影响,在式(8)中把 ωnt看作自变量,把看作因变量,可以得到如图5所示的曲线图。讨论阻尼比对加速度的影响,在式(9)中把 ωnt看作自变量,把看作因变量,可以得到如图6所示的曲线图。

图5 阻尼比对变形量的影响
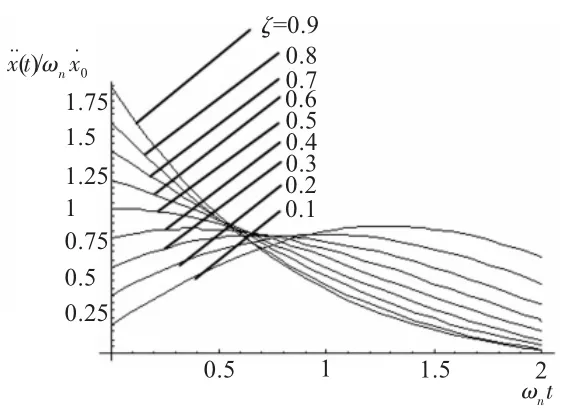
图6 阻尼比对加速度的影响
由图5可知,当输入阶跃速度和系统的固有频率不变时,阻尼比越小,缓冲系统的变形量越大,冲击持续的时间就会越长。所以在缓冲设计时,增大阻尼比,可以减小缓冲系统的变形量。而由图6可知,当输入阶跃速度和系统的固有频率不变时,阻尼比取的过大或过小,加速度的值都比较大。由此可见,存在最优阻尼比。对式(12)对阻尼比求导,并令其等于0,对其进行数值求解,得到当冲击的持续时间较短时,阻尼比取在0.265附近时,电子机柜的最大加速度最小。
4 结束语
无阻尼缓冲设计时,系统的固有频率越低,则电子机柜所受到的冲击加速度越小,此时缓冲效率也越高,而此时缓冲系统的最大变形量就越大;而在有阻尼缓冲设计时,系统固有频率的影响和无阻尼的情况相同,系统的固有频率越低,电子机柜的受到加速度越小,缓冲系统的变形越大。而阻尼比的增大,可以减小缓冲系统的变形量,阻尼比的过大或过小,都会使加速度值较大,当阻尼比取在0.265附近时,电子机柜的最大加速度最小。
[1]季 馨.电子设备振动分析与试验[Z].南京:东南大学出版社,1992.
[2]鲁守来,季馨译.电子设备振动分析[Z].南京:南京工学院241教研组,1983.
[3]丁文镜.减振理论[M].北京:清华大学出版社,1988.
[4]马志宏,李金国.军用装备抗振动、抗冲击设计方法[J].装备环境工程,2006,(10):70-73.
猜你喜欢
机械管理开发(2022年5期)2022-07-07
振动与冲击(2022年1期)2022-01-27
化工自动化及仪表(2021年6期)2021-11-26
地震研究(2021年1期)2021-04-13
铁道通信信号(2020年9期)2020-02-06
电子技术与软件工程(2020年17期)2020-02-02
铁道通信信号(2019年4期)2019-10-10
振动与冲击(2019年4期)2019-02-22
自动化仪表(2017年8期)2017-08-30
航天制造技术(2017年3期)2017-07-06