基于PLC的模糊频载调节器设计
2012-01-22 11:21,,
船海工程 2012年2期
, ,
(1.空军雷达学院 军械通用装备系,武汉 430019;2.海军工程大学 船舶与动力学院,武汉 430033)
现代船舶电站调频调载装置普遍采用基于功频差综合信号的PI控制策略和脉宽调制技术,在负荷大幅度变动时,首先由原动机调速系统进行一次调频,然后再由调频调载装置进行二次调频。由于PID控制器本质上属于线性控制器,其控制参数是针对额定工况点附近而整定的,对于具有大惯性、大滞后以及非线性的被控对象,固定的比例系数和积分系数难以满足不同工况下调节过程都达到优化的要求,调节过程易出现因参数设定不当而导致超调量过大或调节时间过长的现象。
本文将模糊控制策略应用于船舶汽-柴并车型电站系统的调频调载控制中,采用高可靠性、耐恶劣环境的可编程控制器PLC,实现一体化的自动调频调载。同时,通过硬件在环仿真,对PLC模糊频载调节器的有效性进行试验研究。
1 模糊频载调节器设计方案
目前,调频调载方案绝大多数为虚有差法[1]。虚有差法可实现原动机外特性线的相应平移,使并联运行各机组的频率以及有功功率分配差度保持在规定的范围内。
模糊控制可进一步提高异型原动机联合电站的频载调节效果。作为智能控制分支之一的模糊控制,具有鲁棒性强、响应快、易修正、不需系统模型的特点,其动态特性好,上升时间、调节时间较短,可以平滑地到达稳态。然而由于模糊控制器的输入一般为误差、误差的变化率,可认为是PD控制器,其抗干扰效果差,同时可能导致较大静差。为增强抗扰动能力和减小静差,本文在频载调节中综合了传统控制技术和智能控制技术的优点,采用模糊控制和PI调节的共同作用,见图1。试验表明,其减小静差和提高稳定性的效果明显。

图1 PI-模糊控制器
2 PLC频载调节器硬件
可编程序控制器控制技术用于船舶电站的自动调频调载,具有可靠性高、抗干扰强、便于维护、便于改进的优点[2]。本文所用可编程序控制器选用日本三菱公司生产的FX2N微型PLC,其基本指令执行时间高达0.08 μs,内置的用户存储器为8 k步,有多种特殊功能模块或功能扩展板,机内有时钟,PID指令用于模拟量闭环控制。采用CFX-GP/WIN-C软件进行编程和调试。
频率信号测量将转速脉冲进行电平变换后送入PLC高速计数器接口X0、X1,利用定时中断获取转速脉冲的读数,然后利用定时时间间隔计算出发动机转速。
发电机功率检测利用了PLC模拟输入模块FX2N-4AD,该模块提供12 bit高精度分辨率,4通道电压输入(-10~10 V直流)或电流输入(-20~20 mA直流),对每一通道,可以规定输入类型。
PLC通过对综合偏差信号的计算,由高速脉冲输出口输出PWM信号调节汽轮发电机、柴油发电机的转速,完成频载调节。
3 软件编程
目前广泛采用的是二维模糊控制器,这种模糊控制器以偏差e和偏差变化率Δe(Δe=en-en-1)作为输入变量,以控制量u为输出变量。通常的作法是把e、Δe和u的精确量转化为模糊量,送给模糊控制器进行处理,模糊控制器根据控制规则决定的模糊关系,应用模糊推理合成算法得出输出的模糊量,再经过模糊判决,给出输出控制量的精确值。为克服实时计算量大、耗时多的缺点,PLC模糊控制器首先通过离线计算取得模糊控制表,然后将控制表存放到PLC内存中,实际控制时通过软件查表的方式取得相应控制值[3]。
本文的模糊控制器将频差功差综合偏差信号e及其变化率Δe作为输入语言变量。根据PLC频率和功率的实测变化结果,设系统偏差e的基本论域为[-250,250],偏差变化率Δe的基本论域为[-50,50],控制量u的基本论域为[-12,12],这里的“-”号意思是发出减速信号,并不是说脉冲的宽度本身为负值。各论域所分的等级为13档,即偏差语言变量E、偏差变化率语言变量ΔE和输出语言变量U的论域均为 {-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}。
为便于PLC编程,隶属函数取三角形函数。实际运行的在线查表模糊控制器需要进行模糊量化取整,一旦实测获得的误差E与误差变化率ΔE不等于模糊语言值(如PPB、PB、PS、ZE、NS、NB、NNB等),E和ΔE量化取整可采取如下办法。

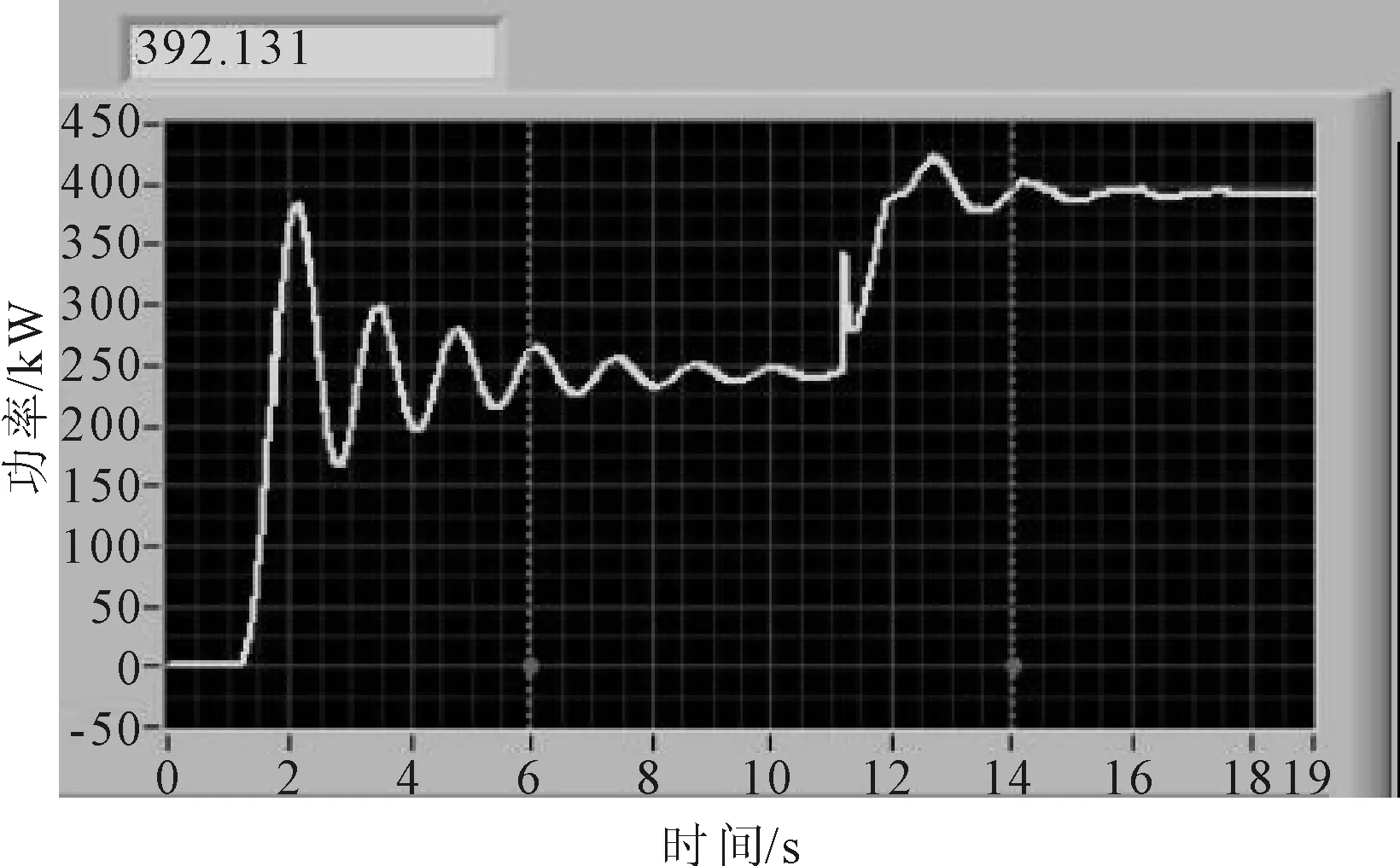
2)Xh-d/2≤E 3)E≥Xn-1+d/2时,E量化为Xn。 上述d=(Xh+1-Xh)/2;X为E的论域。 在PLC中,量化取整运算采用触点比较指令[4]实现。 模糊控制规则的确定原则是使系统输出响应的动、静态特性达到最佳。利用典型的频载调节输出响应曲线制定控制规则,并采用重心法最终求得的控制表见表1。 表1 模糊控制表 跟据模糊控制表,PLC模糊控制器的控制过程可按以下步骤完成。 1)在每一个控制循环对系统的输入进行采样以求出e和Δe; 2)将e和Δe分别乘以各自的量化因子ke、kΔe,取整量化为相应论域X、Y中的元素; 3)从控制表中查找X和Y对应的控制量u的论域值U; 4)用比例因子ku乘以查表所得的论域值便得到实际的控制量u。 图2 查询模糊控制表梯形图 PLC模糊频载调节的程序运行框图见图3。在进行初始化及模糊控制表存储等工作后,PLC在每一个循环测量机组的频率和功率信号,并计算综合偏差信号k1Δf+k2ΔP。当出现较大功频扰动时,PLC频载调节在动作之前延时5 s,等待原动机调速器动作之后,若仍有较大的偏差时再进行调节。即应判断偏差信号存在5 s以上才进行调节,若偏差信号在5 s内变化至死区(不动作区)内,则PLC频载调节器不动作。频载调节以综合偏差信号的PI运算和模糊运算的综合结果对调速脉冲信号的宽度进行调节。当频率大于50.5 Hz时,综合信号作用只作减速,而对加速进行闭锁,当频率小于49.5 Hz时,综合信号只能加速,而对减速进行闭锁。 图3 PLC模糊频载调节程序框图 采用硬件在环仿真方式研究PLC模糊调频调载装置的工作可靠性及控制策略的调节效果。硬件在环仿真系统由工控机、数据采集卡、PLC模糊频载调节器及电平转换电路等组成。 工控机完成柴油发电机、汽轮发电机组数学模型的快速仿真计算,得出相应工况的转速(频率)、功率等数值,通过NI公司多功能数据采集卡PCI6221并经过信号和电平转换电路将信号电平升高至PLC的输入电平24 V后,送入PLC模糊调频调载装置。PCI6221模拟通道将汽轮发电机/柴油发电机模型的功率信号输出至PLC的模拟输入模块。PCI 6221数据采集卡的计数器可生成两路1~60 kHz的方波信号,模拟普通磁电式转速传感器或数字编码器产生的机组转速信号,该转速信号送至PLC高速计数器接口X0、X1。 PLC计算出频率和功率的综合偏差信号,再经频调载控制算法产生控制柴油机、汽轮机转速的PWM调节信号反馈至工控机,对柴油发电机、汽轮发电机组并机模型的频载进行调节,完成硬件在环仿真。 利用工控计算机计算提取柴油发电机、汽轮发电机组运行特征参数,并在计算机屏幕上直观显示调试参数和调试曲线,使其具备准确的性能分析和直观图示能力,以准确判定调频调载装置的性能和控制策略的作用效果。 仿真系统软件采用美国NI公司的LabVIEW[5]及控制和仿真设计工具包。采用LabVIEW软件,能实现虚拟仪器方式的数据测试、测量和实时显示,可定量确定PLC调频调载控制器的工作状态。LabVIEW仿真模块能对线性系统、非线性系统、离散系统和连续系统进行仿真。将汽轮发电机和柴油发电机组数学模型置于LabVIEW的仿真循环中,并建立与板卡硬件的I/O联系后,即能利用发电机组仿真模型考核实际的PLC模糊频载调节装置。在硬件在环仿真中,要求硬件I/O的采样时间与仿真步长一致。 利用某型船舶异型机组的数学模型[6]对PLC模糊频载调节装置进行研究。其中汽轮发电机组额定功率为1 200 kW,柴油发电机组额定功率为600 kW。当负荷扰动为1 200 kW时,PLC模糊频载调节的调节曲线见图4~6。 图4 汽轮发电机组功率变化曲线 图5 柴油发电机组功率变化曲线 图6 机组频率变化曲线 由图可见,负荷扰动首先由调速器进行调节(设定原动机模型的调差系数),为更清楚地观察两者的作用效果,在调速器作用10 s后频载调节装置投入工作,可见,采用PI-模糊控制策略后,频载调节获得了较好结果,超调量小,调节时间缩短,收敛快,调节过程平稳。稳定时,汽轮机承担的负荷为808.627 kW(见图4),柴油机承担的负荷为392.193 kW(见图5),频率得到恢复(见图6)。 可见,无论是频率还是功率,采用模糊控制,其变化都更加稳定。 1)在Matlab数学仿真的基础上,利用PLC实现了模糊频载调节模块,探讨了基于FX2N微型PLC的软硬件实现方案。 2)基于LabVIEW建立了硬件在环仿真平台,对PLC智能频载调节装置进行了试验研究。结果表明,所采用的控制方法超调量小,稳态误差小,能有效改善船舶电站的频率稳定性和负荷分配效果。 3)利用PLC实现发电机组频载调节装置,能提高装置的可靠性和一体化水平。但对于更为复杂的控制策略的实现,则显得灵活性不足。 [1] 裴 峰,许正喜,罗 伟.舰船电站自动频载装置研究[J].船电技术,2003(4):15-19. [2] 黄丽卿,杨国豪,俞万能.船舶电站可编程序自动频载调节装置[J].中国航海, 2002 (3):64-66. [3] 齐 蓉,林 辉,李玉忍.通用模糊控制器在PLC上的实现[J].工业仪表与自动化装置, 2003(4):23-25. [4] 程子华.PLC原理与编程实例分析[M].北京:国防工业出版社,2007. [5] 杨乐平.LabVIEW程序设计与应用[M].2版.北京:电子工业出版社,2005. [6] 孙 彬,曾凡明.基于模糊控制的船舶电站频载控制仿真[J].舰船科学技术,2010(11):130-133.



4 硬件在环仿真试验


5 结论
猜你喜欢
计算机仿真(2022年2期)2022-03-15
能源工程(2021年5期)2021-11-20
哈尔滨工程大学学报(2021年7期)2021-07-13
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03
科技传播(2019年24期)2019-06-15
消费导刊(2018年8期)2018-05-25
电子制作(2016年21期)2016-05-17
海军航空大学学报(2015年4期)2015-02-27