
海上摄像平台运动对目标在靶面成像位置影响的分析
2012-01-18 12:03:52邓江生樊利恒古立莉
电子设计工程 2012年24期
邓江生,樊利恒,古立莉
(1.海军航空仪器计量站 上海 200436;2.海军航空工程学院 控制工程系,山东 烟台 264001;3.中国人民解放军94748部队 江苏 南京 210008)
摄像平台的运动避免不了的对目标成像位置产生影响[1]。海上摄像平台的运动主要有四种形式:横摇、纵摇、艏摇和垂荡[2]。目前的研究都集中在平台的稳定性分析和怎样进行补偿上,而关于平台运动对摄像系统影响的分析几乎无人提及[3-7]。通过运动对成像位置的影响分析不仅为平台稳定装置提供了性能指标的基础,该工作是一项非常有意义和重要的工作。下面对这些运动对成像位置的影响一一加以分析并针对可见光波段和红外波段两种情况进行具体计算。
由于目标成像在靶面中间位置是最理想的位置,也是最易受平台运动影响的位置,如果在中心位置成像的情况下平台运动使目标移出视场,则在其他成像位置时也必然移出视场。本文分析假设目标成像在靶面中心,然后分析摄像平台运动对目标成像位置的影响进行定量计算和定性分析。
1 各种运动对成像位置的影响
1.1 横摇对成像位置的影响
分析横摇对成像的影响。横摇使得摄像机在水平和垂直方向上有个位移 (x,y)(如果摄像机与横摇在横摇轴上方并且距离为h米,建立以摄像机为原点的直角坐标系,则|x|=h×sinα,|y|=h(1-|cosα|),同时摄像机成像面有一个相对于它自身中心的旋转,旋转角度为α。设平台静止时目标在靶面的成像位置为(xt,yt),目标距离摄像机的距离为 d,则位移造成的目标成像位置位移为

其中f为焦距,α为横摇的角度,ε为像元尺寸。

考虑旋转对成像位置造成的影响。将初始位置(xt,yt)用极坐标表示,可得到目标的位置为(r,θ),其中:
把横摇角度α考虑进去,可求得平台横摇对目标成像位置的综合影响,得到发生横摇时目标成像位置的极坐标表示为:(r′,θ′)


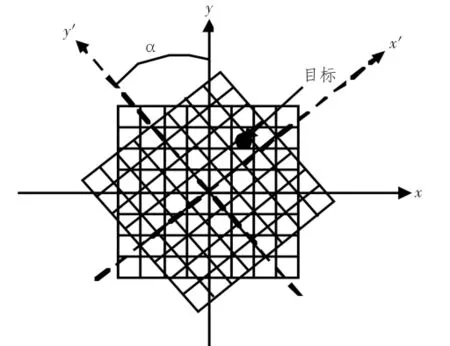
图1 旋转对成像位置的影响Fig.1 Rotation’s impact on the location of imagery
1.2 纵摇对成像位置的影响

图2 视场角Fig.2 Angle of FOV(field of view)
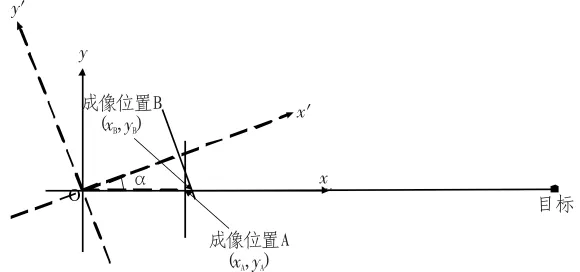
图3 纵摇对成像位置影响的示意图Fig.3 Pitching’s impact on the location of imagery
分析纵摇对成像的影响。如图3所示,当纵摇的幅度为α且初始位置为靶面中心时,则纵摇角β对成像位置的影响如公式(6)所示:

其中,Yn纵摇幅值对成像面在垂直方向的影响,表现为目标在CCD靶面位移的行数,ε为像元尺寸。
1.3 艏摇对成像位置的影响
艏摇对成像位置的与纵摇的情况类似,不同的只是方向不同。设纵摇的角度为β,则艏摇角β对成像位置的影响如公式(7)所示:

其中,Xn纵摇幅值对成像面在垂直方向的影响,表现为目标在CCD靶面位移的行数,f为焦距,ε为像元尺寸。
1.4 垂荡对成像位置的影响
分析垂荡对成像的影响。垂荡使得摄像机在垂直方向上有个位移Δy,在水平方向上对平台没有影响。设平台静止时目标在靶面的成像位置为(xi,yi),目标距离摄像机的距离为d,则位移造成的目标成像位置位移为:


2 各种运动对可见光波段相机成像的影响
选用的可见光波段相机为Adimec-RAAdimec-RA-4020,该相机的像素数为1 728×1 296,像元尺寸为7.4μm×7.4μm,焦距为 75 mm,视场角为 9.7°×7.3°(水平×垂直)。
2.1 横摇的影响
由公式(3)和公式(4)可以看出,平台静止时目标的成像位置对最终成像位置的影响很大。如图4所示,考虑只有旋转的情况,此时只要目标成像在图4中圆形区域内目标就不会出视场,而当目标成像在圆形区域外时只要旋转一定角度则目标就出移出视场,特殊情况是成像在x轴与靶面交界处,此时只要发生旋转目标就会移出视场。目标与靶面中心的距离越大则受旋转的影响越大。可以计算出图4圆的半径Y为r=648,其中r的单位为像素的行数。如果r>648但成像位置与x轴夹角小于横摇角时目标也不会出视场,即 θ=arctan(x/y)<α。

图4 只有旋转没有位移的情况Fig.4 Rotation without displacement in any direction
2.2 纵摇的影响
分析平台静止时目标在靶面中心成像的情况,则当目标移动像素数的一半时目标移出视场,根据公式(6)计算目标移出视场时的纵摇角。将代入可以求得α=3.658 3°。即当纵摇角大于临界α临界时目标会出视场,而当摇摆角α小于α临界时,目标只要成像在中心7.3°~2α区域就不会移出视场。
2.3 艏摇的影响
分析平台静止时目标在靶面中心成像的情况,则当目标移动像素数的一半时目标移出视场,根据公式(7)计算目标移出视场时的艏摇角。将f=75 mm,ε=7.4μm,864代入可以求得β=4.872 6°。即当艏摇角临界大于β临界时目标会出视场,而当摇摆角β小于β临界时,目标只要成像在中心7.3°~2β区域就不会移出视场。
2.4 垂荡的影响
分析垂荡对可见光波段相机成像的影响。设垂荡的幅度为Δy,设平台静止时目标在靶面的成像位置为(0,0),目标距离摄像机的距离为d=6 km,ε=30μm,f=75 mm,则位移造成的目标成像位置位移为:

当Δyt=648时目标才会出视场,此时Δy=383.616 m,即垂荡为383.616 m时目标移出视场。
根据上面的叙述和计算,得出表1结论。
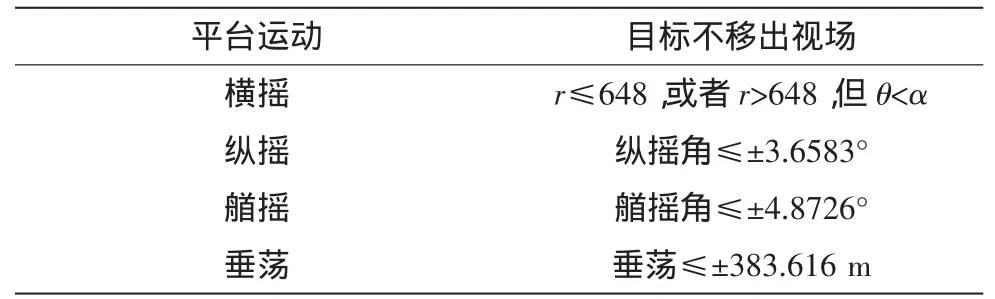
表1 使得目标不移出视场的平台运动范围Tab.1 Range of platform’s movement when target in the FOV
3 各种运动对红外波段相机成像的影响
选用的红外波段相机为GUIDIR公司的IR600红外热像仪,该相机的像素数为 320×256,像元尺寸为 30μm×30μm,焦距为 600 mm/150 mm/22 mm,相应的视场角为 0.92°×0.73°/3.67°×2.93°/24.62°×19.80°(水平×垂直)。
3.1 横摇的影响
由公式(3)和公式(4)可以看出,平台静止时目标的成像位置对最终成像位置的影响很大。如图4所示,考虑只有旋转的情况,此时只要目标成像在图4中圆形区域内目标就不会出视场,而当目标成像在圆形区域外时只要旋转一定角度则目标就出移出视场,特殊情况是成像在x轴与靶面交界处,此时只要发生旋转目标就会移出视场。目标与靶面中心的距离越大则受旋转的影响越大。可以计算出图4圆的半径r为r=128,其中r的单位为像素的行数。如果r>648但成像位置与x轴夹角小于横摇角时目标也不会出视场,即θ=arctan(x/y)<α。
3.2 纵摇的影响
分析平台静止时目标在靶面中心成像的情况,则当目标移动像素数的一半时目标移出视场,根据公式(6)计算目标移出视场时的纵摇角。将ε=30 mm,f=600 mm/150 mm/22 mm,Yn=256/2=128 代入 Yn=f×tanα/ε, 可以求得 α临界=0.3667°/1.4665°/9.9010°。即当纵摇角大于 α临界时目标会出视场,而当摇摆角 α小于 α临界时,目标只要成像在中心 0.73°-2α/2.93°-2α/19.80°-2α 区域就不会移出视场。
3.3 艏摇的影响
分析平台静止时目标在靶面中心成像的情况,则当目标移动像素数的一半时目标移出视场,根据公式(7)计算目标移出视场时的艏摇角。将ε=30 mm,f=600 mm/150 mm/22 mm,Xn=320/2=160 代入 Xn=f×tan β/ε, 可以求得 β临界=0.458 4°/1.832 8°/12.308 0°。即当艏摇角大于 β临界时目标会出视场,而当摇摆角β小于 β临界时,目标只要成像在中心0.92°-2β/3.67°-2β/24.62°-2β 区域就不会移出视场。
3.4 垂荡的影响
分析垂荡对可见光波段相机成像的影响。设垂荡的幅度为Δy,设平台静止时目标在靶面的成像位置为(0,0),目标距离摄像机的距离为d=6 km,焦距为f=600 mm/150 mm/22 mm,ε=30μm,则位移造成的目标成像位置位移为

当Δyt=128时目标才会出视场,此时Δy=38.4 m或153.6 m或1 047.273 m,即垂荡为Δy=38.4 m或153.6 m或1 047.273 m时目标移出视场。
根据上面的叙述和计算,得出如表2~4结论。
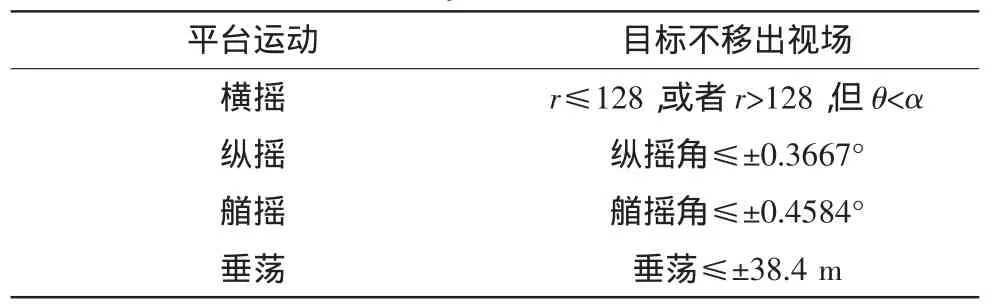
表2 使得目标不移出视场的平台运动范围(f=600 mm)Tab.2 Range of platform’s movement when target in the FOV(f=600 mm)
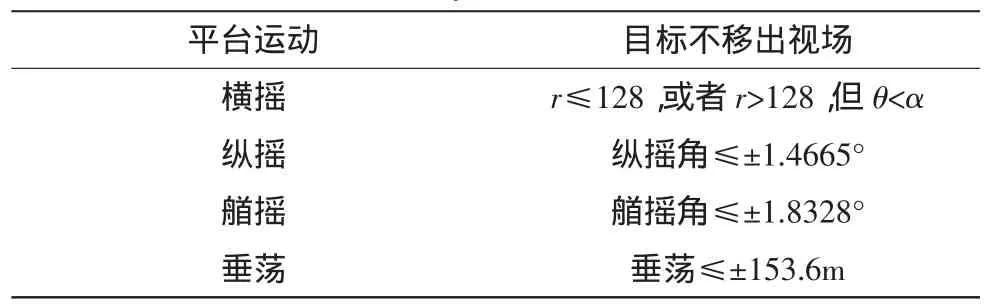
表3 使得目标不移出视场的平台运动范围(f=150 mm)Tab.3 Range of platform’s movement when target in the FOV(f=150 mm)
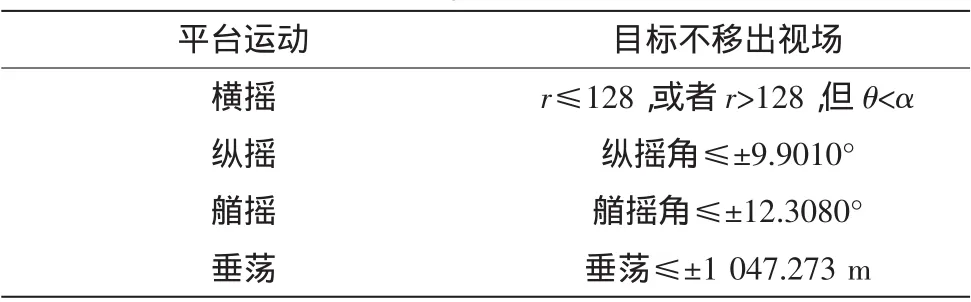
表4 使得目标不移出视场的平台运动范围(f=22 mm)Tab.4 Range of platform’s movement when target in the FOV(f=22 mm)
4 结 论
由上述分析可以看出,平台的垂荡运动对目标成像位置的影响最小;横摇对成像位置的相应与目标在靶面的最初成像位置有关;纵摇和艏摇对成像位置的影响最大,与传感器尺寸、焦距有关,目标出不出视场由摇摆角与视场角确定。根据分实际情况,在恶劣海况下目标是比较容易出视场的,所以必须加装稳定装置。
[1]温昌礼.平台角振动对图像测量系统的影响 [D].长沙:国防科技大学,2006.
[2]李伟.船舶液压稳定平台的设计与分析[D].大连:大连海事大学,2010.
[3]孙辉,郎小龙,李志强,等.动载体光电平台视轴稳定精度的检测[J].光学精密工程,2011,19(9):2131-2138.SUN Hui,LANG Xiao-long,LI Zhi-qiang,et al.Measurement for LOS stabilization accuracy of electro-optical imaging systemon moving carrier[J].Optics and Precision Engineering,2011,19(9):2131-2138.
[4]毛峡,刘言,梁晓庚.极坐标框架两轴平台光轴稳定算法[J].兵工学报,2011,32(10):1260-1265.MAO Xia,LIU Yan,LIANG Xiao-gen.Algorithm of optical axis stabilization based on two-axis polar coordinate frame platform[J].Acta Armamentarii,2011,32(10):1260-1265.
[5]王晨,马彩文,梁雁冰,等.基于机动平台的光电经纬仪自稳定跟踪技术[J].红外与激光工程,2010,39(4):644-670.WANG Chen,MA Cai-wen,LIANG Yan-bin,et al.Selfstabilization target tracking technology based on mobile platform [J].Infrared and Laser Engineering,2010,39 (4):644-670.
[6]夏静萍,王道波.四框架稳定跟踪平台原理样机设计与实现[J].兵工自动化,2012,31(1):86-90.XIA Jing-ping,WANG Dao-bo.Design and realization of four-gimbal stabilization and tracking platform prototype[J].Ordnance Industry Automation,2012,31(1):86-90.
[7]周小刚,汪立新,余嫱,等.光纤陀螺平台稳定回路设计与实验研究[J].宇航学报,2008,29(2):567-575.ZHOU Xiao-gang,WANG Li-xin,SHE Qiang,et al.Designs of the servo loop of optic fiber gyroscope platform and experiment research[J].Journal of Astronautics,2008,29(2):567-575.
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
广东造船(2020年1期)2020-05-03 14:01:49
西安交通大学学报(2019年9期)2019-09-10 04:01:22
中国医疗设备(2019年1期)2019-01-15 12:10:54
西安交通大学学报(2018年1期)2018-01-12 04:25:54
中国公共安全(2017年8期)2017-10-13 08:12:17
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
兵工学报(2015年10期)2015-11-21 05:45:28
激光与红外(2015年10期)2015-03-23 06:07:18
