
基于IMM-PDA算法的实际业务流预测研究
2012-01-10 03:33鄢树
成都大学学报(自然科学版) 2012年1期
鄢树
(成都大学信息科学与技术学院,四川成都 610106)
0 引言
传统的网络流量被认为是服从Possion分布或近似为Markov过程,所以大都是基于线性模型来近似处理流量的发展趋势,其代表算法主要有基于自回归(AR)或自回归滑动平均(ARMA),这些算法比较简单,对短期预测有较高的精度,但不适用于长期预测.1975年,Bar-Shalom[1]提出概率数据关联(probability data association,PDA)滤波,它是一种实时性较好的关联算法.此后,有学者提出联合概率数据关联滤波(joint probability data association filter,JPDAF)[2-4],其被公认为是解决密集回波下多目标数据关联最有效的算法之一,此外,还有学者提出交互式多模型概率数据关联[5,6],并将其用于跟踪杂波环境中的单个机动目标.基于此,本文提出一种基于交互式多模型(interacting multiple model probability data association filter,IMM-PDA)的实际业务流预测算法,其基本思路是通过各个接收终端作为传感器获取数据,利用各个PDA模型在不同时刻对各接收端的数据进行融合,这种融合较单纯PDA算法有了进一步提高,可以根据业务流的轨迹变换不同的模型,能够更加精确地预测下一步业务流的到达情况.
1 IMM-PDA算法描述
目前,相关研究已经证明实际业务流具有分形特性,并且是长相关的.因AR、ARMA等模型不适用于长相关数据的准确预测,故本研究采用IMMPDA算法提高对实际业务流的预测精度.IMM-PDA算法思想(见图1)为:首先,获取相关量测;然后,在各个PDA模型的相互作用下,进行模型的概率更新操作;最后,进行滤波操作,输出预测结果.
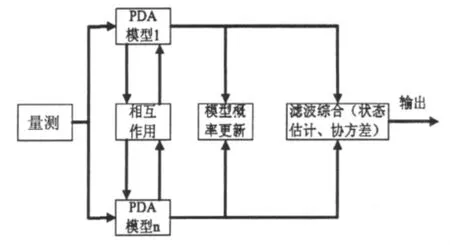
图1 IMM-PDA算法模型
IMM-PDA算法的滤波综合公式为:
结合IMM-PDA算法与实际情况,对仿真环境进行如图2所示的模拟.
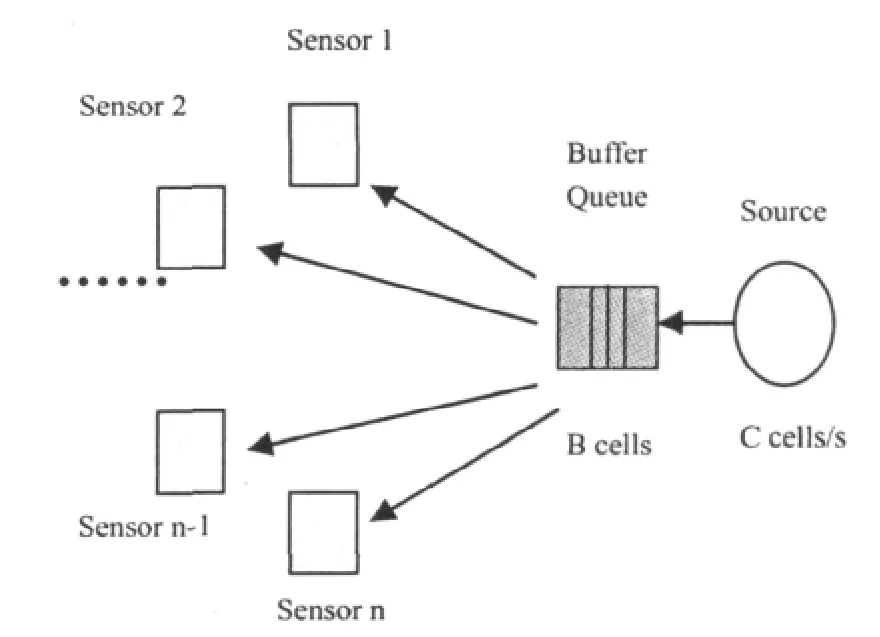
图2 仿真环境模拟示意图
图2中,假设有多台终端,Sensor 1到Sensor n,接受来自于服务器Source的数据,中间通过一缓冲区对数据进行溢出控制.利用IMM-PDA算法,通过对各个终端接收到的不同结果进行研究,可分析并预测下一时刻服务器发送数据的情况.对于航迹中运动的目标轨迹可能以360°中任意一角度运动到下一位置,而本研究的实际业务流的运动轨迹反映到二维平面,其运动的角度则在-90°~90°之间.由此,IMM-PDA算法的具体步骤为:
(1)对各终端获取实际业务流数据,Zt,t=1,2,…,k.
(2)根据上一步预测的数据,Z(k|k-1),计算获取的实际业务流的信息,

(3)根据新的信息,对接收端进行状态更新,

其中,W(k)为卡尔曼滤波参数,状态X(k)可以假设为业务流的速率和流量大小.
(4)对各个终端的PDA模型进行参数融合,

从而获取比较精确的状态信息,式中,m(k)表示在时刻k确定的量测个数.
(5)对不同时刻的模型进行更新,

(6)根据融合后的参数计算实际业务流位置,

(7)对下一步状态进行预测,

其中r1(k+1)为状态漂移量.可将得到的状态参数作为下一步(4)步骤中的初始参数.
(8)对下一步位置进行预测,

其中r2(k+1)为位置漂移量.可将得到的位置参数作为下一步(3)中的初始参数.
(9)令k=k+1,跳转到(1),直至循环结束.
在上述算法步骤(5)所进行的融合过程中,μi(k)是k时刻模型Mi的正确概率,

其中,似然函数Λi(k)是多量测信息的联合概率密度函数.
2 仿真分析
本研究采用图2所示的仿真环境采集实际数据进行验证.在仿真实验中,假设跟踪门采用椭圆门,同时用本文所提算法并与AR、ARMA、PDA算法预测的结果进行比较,其仿真实验结果如图3所示.
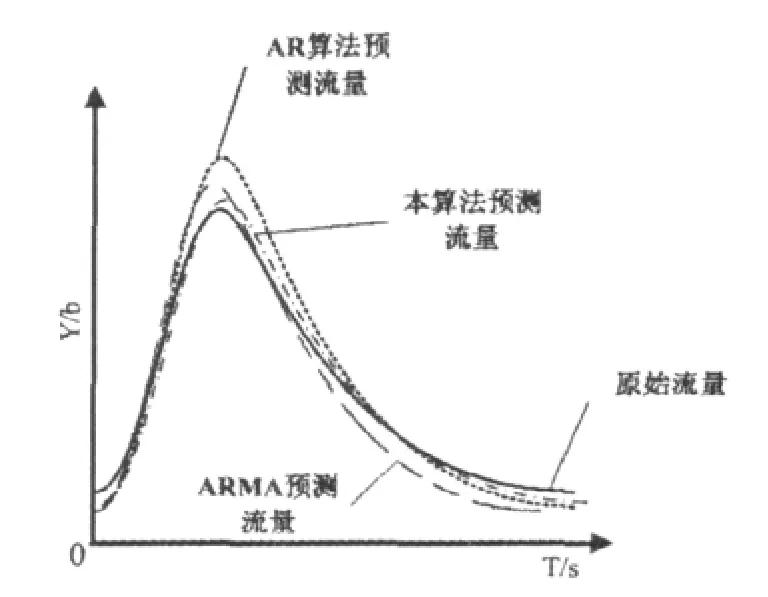
图3 仿真实验结果
4种算法的残差比较如表1所示.

表1 4种预测算法残差比较
从图1与表2的仿真实验结果可以看出,在实际数据的分形特性之下,IMM-PDA算法可以针对实际环境比较精确地预测实际业务流,其性能较AR、ARMA、PDA算法有较大提高.
3 结论
本文提出了一种基于IMM-PDA的实际业务流预测算法,通过与AR、ARMA、PDA算法预测结果的仿真实验对比,证明了本算法的有效性.后续研究中,可以考虑进一步结合JPDA等算法,从而实现更加精确地预测实际业务流.
[1]Bar-Shalom Y,Tse E.Tracking in a Cluttered Environment with Probabilistic Data Association[J].Automatica,1975,11 (5):451-460.
[2]Fortmann T E,Bar-Shalom Y,Scheffe M.Multitarget Tracking Using Joint Probabilistic Data Association[C]//Proceedings of the 19th IEEE Conference on Decision and Control.Albuquerque:IEEE Press,1980.
[3]Fortmann T E,Bar-Shalom Y,Scheffe M.Sonar Tracking of Multiple Targets Using Joint Probabilistic Data Association[J].IEEE Journal of Oceanic Engineering,1983,8(3):173-184.
[4]魏守辉,吴庆宪.基于数据关联性能优化的跟踪门算法[J].机械工程与自动化,2005,34(5):17-19.
[5]Bar-Shalom Y.Tracking a Maneuvering Using Input Estimation Versus the Interacting Multiple Model Algorithm[J].IEEE Transactions on AES,1989,25(2):296-300.
[6]Lerro D,Bar-Shalom Y.Interacting Multiple Model Tracking with Target Amplitude Feature[J].IEEE Transactions on AES,1993,29(2):494-509.
猜你喜欢
新世纪智能(数学备考)(2021年9期)2021-11-24
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
当代陕西(2019年15期)2019-09-02
学苑创造·A版(2018年11期)2018-02-01
读者(2017年5期)2017-02-15
电子制作(2016年15期)2017-01-15
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
