
电动助力转向系统集成建模及仿真
2011-11-22 06:43:36彭剑坤张小龙冯能莲
湖北汽车工业学院学报 2011年4期
彭剑坤,张小龙,冯能莲,2
(1.安徽农业大学工学院,安徽合肥230036;2.北京工业大学环能学院,北京100022)
电动助力转向(Electronic Power Steering,简称EPS)系统依靠电动机提供助力转矩,根据车速和方向盘输出转矩调整助力转矩的大小,以增强驾驶员在低速行驶的转向轻便性和高速行驶时的路感。与机械式和液压式助力转向系统相比,具有节能、环保、助力特性可控和结构紧凑等优点[1]。
汽车行驶过程中的姿态和选用轮胎的差异对动态助力特性存在影响。目前对EPS研究中的系统建模通常忽略了这2个因素[2]。本文采用整合EPS系统模型、轮胎模型和三自由度整车模型的集成仿真模型对EPS动力学特性进行研究,突出轮胎回正力矩和车身侧倾角对EPS的影响,为EPS的控制器开发以及实车实验奠定理论基础。
1 EPS集成模型结构
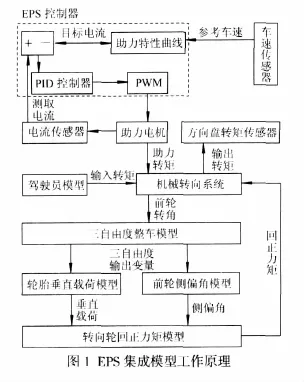
汽车本身是涵盖多个子系统的多刚体系统,通过惯性、阻尼、弹性等动力学因素相互作用。考虑到转向时车身侧倾角的变化会对轮胎的侧偏特性进行干涉,造成轮胎回正力矩的变化;而轮胎回正力矩的变化又会改变转向系的阻力,从而影响EPS系统的输出特性,具体表现为通过小齿轮位移的变化影响前轮转角的变化,而前轮转角的变化又会对整车动力学进行重新评价。由此构成一个闭环系统。基于上述考虑,将EPS系统模型、轮胎模型、整车模型和驾驶员模型按照彼此的关系整合起来,构成基于整车动力学的EPS集成模型,其工作原理如图1所示。
2 EPS系统模型
2.1 转向系统和助力电机模型[3-4]
以轴助力式电动助力转向系统为研究对象,以齿轮齿条传递为转向系传动形式,采用永磁直流电动机为助力电机。系统结构见图2,系统模型变量及含义见表1。图2中,转向轴的动力学方程为
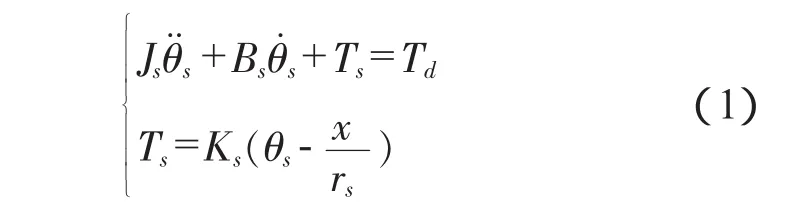
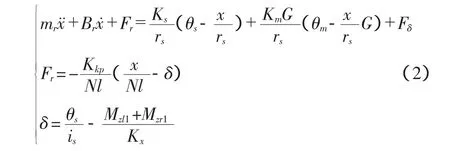
齿轮齿条的动力学方程为
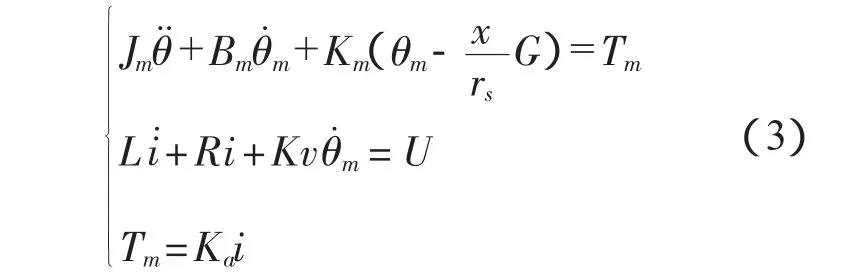
助力电机的动力学方程为


表1 EPS系统模型变量及含义
汽车转向轮的实际转角等于理论转角与变形转角的差值,如式(2)中δ求解所示,转向轮理论转角等于方向盘转角与转向系总传动比的比值,可见为保证仿真效果更符合实际工况,需要对转向轮的回正力矩进行求解,因此必须考虑轮胎特性的影响。
2.2 EPS控制器模型
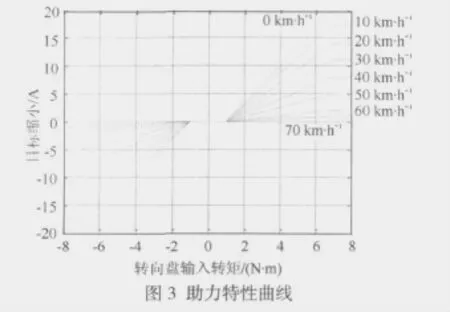
EPS控制器用于实现助力特性。对助力特性的基本要求是,低速时助力应伴随着方向盘转矩的增加而递增;当车速提高时,助力应逐步减少,以保证汽车在高速转向时的路感。目前助力特性主要分为直线型、折线型和曲线型,由于直线型助力特性具有形式简单、容易调节而被广泛采用[5],本文采纳这种方案并建立助力特性曲线如图3所示。
EPS控制系统结构如图1所示。转向时,根据车速信号和由转向轴转矩传感器检测到的转矩信号输入助力特性曲线,经过查取得到目标电流,将目标电流与电流传感器测取的电机实际电流的差值输入PID控制器,得出控制电压,并以PWM模式输入助力电机。PWM环节实质上是起到延迟的作用,其传递函数为

式中:T为PWM开关周期,取1/20000 s。
3 轮胎模型
H.B.Pacejka提出的轮胎模型具有表达精确、简洁,拟合精度较高,并具有较好的置信度,在汽车操纵动力学中应用广泛等优点[6]。论文采用该模型对轮胎回正力矩建模。轮胎的回正力矩可表示为

式(5)各计算因子可参考文献[6],在轮胎回正力矩输入变量计算中涉及前轮侧偏角。前轮侧偏角为

两前轮所受垂直载荷为[7]
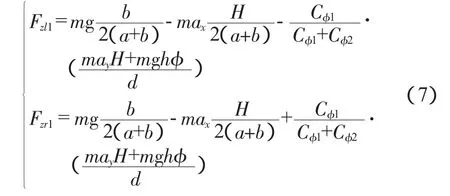

式中:参量及含义如表2所示。
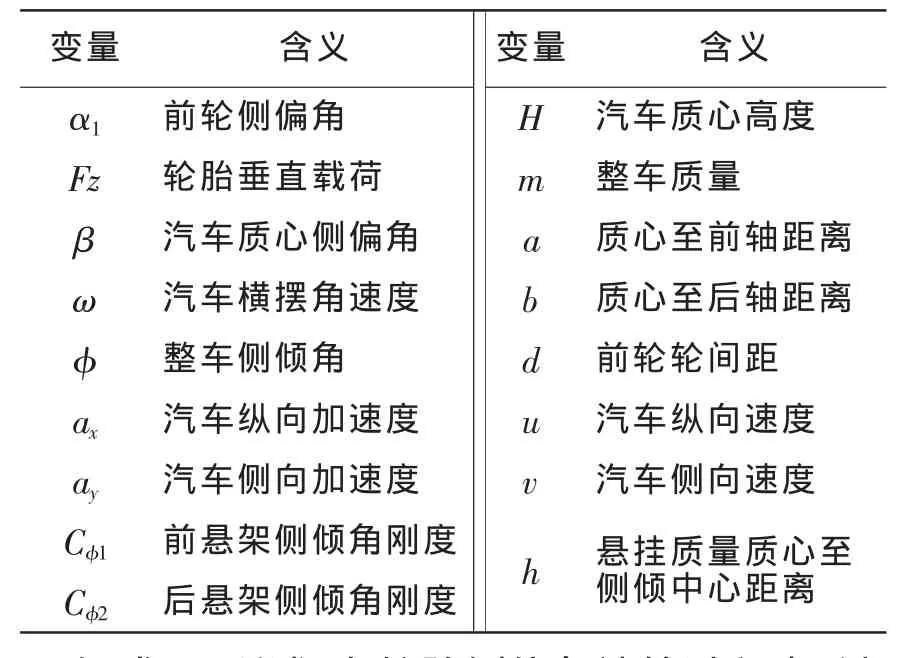
表2 轮胎模型参量及含义
如式(6)所述,在轮胎侧偏角计算过程中,涉及了汽车质心侧偏角和横摆角速度。而如式(7)所述,在轮胎垂直载荷计算过程中,考虑了左右轮胎垂直载荷在转弯过程中由于侧倾角变化引起的重新分配问题,即汽车侧倾角的变化引起轮胎侧偏特性的变化,从而影响整车在转弯运动的稳态响应。由此引入了涵盖侧倾角的三自由度整车动力学模型。
4 整车模型
汽车的转向稳定性主要取决于横摆和侧偏,但侧倾会随这2个方向的运动产生。为全面分析汽车的转向特性,建立基于横摆、侧偏和侧倾的三自由度汽车运动模型如图4所示。

三自由度汽车运动微分方程式为

式中参量及含义见表4。
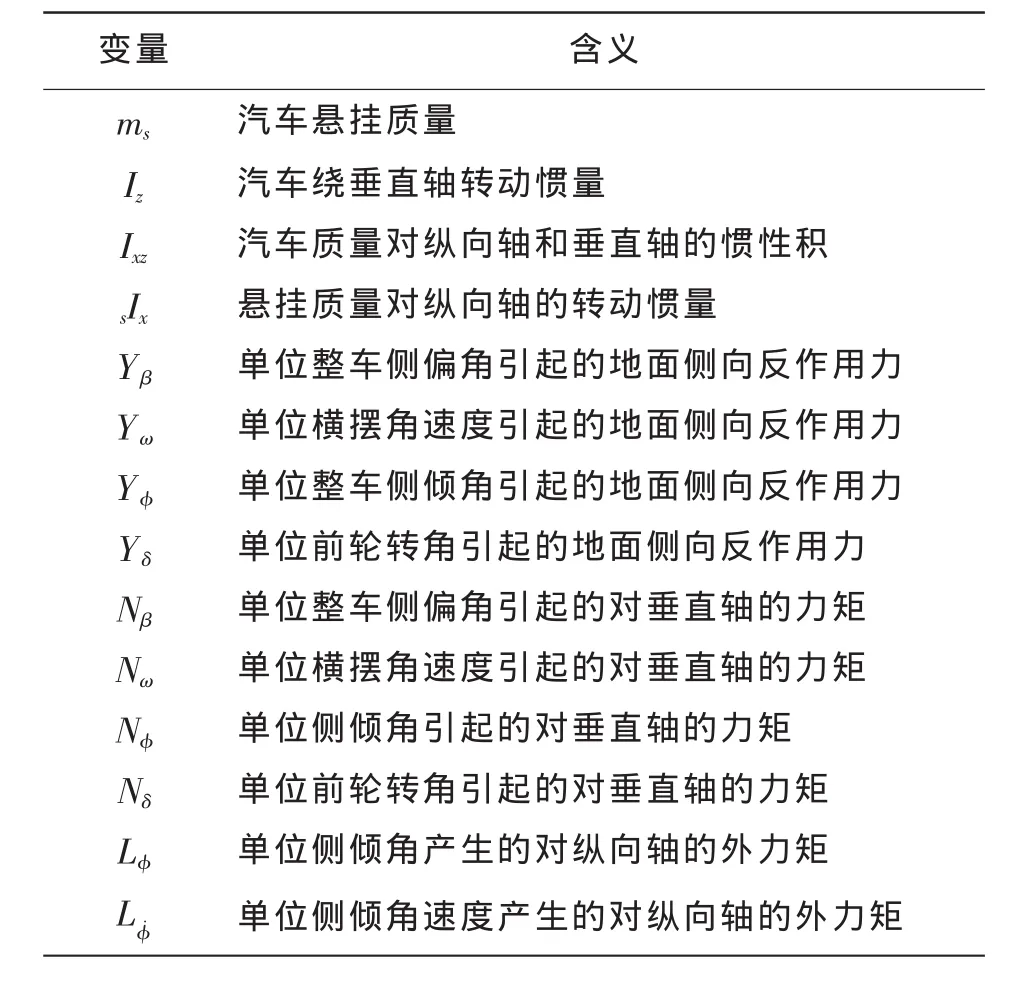
表4 三自由度整车模型参数及含义
5 驾驶员模型
考虑到电动助力转向系统模型的输入是方向盘转矩,为了更好的模拟驾驶员的操作过程和便于直观理解,引入驾驶员模型,使得系统输入由方向盘转矩转换为方向盘转角,模型如式(9)所示[8]:

式中:Kp为比例系数;Kd为微分系数;Ki为积分系数;L为延时时间。
6 实验与结果分析
在Simulink环境下集成上述模型,所涉及的某试验车主要参量值见表5。当驾驶员参考输入转角为500°、周期为8s的阶跃输入或正弦输入时,进行以下仿真实验。
汽车的操纵稳定性同汽车行驶时的瞬态响应有密切关系,通常用转向盘角阶跃输入下的瞬态响应来表征汽车的操纵稳定性,并在该条件下进入稳态响应的横摆角速度增益反映转向灵敏度[9]。由图5可知,有、无EPS控制的瞬态响应在角阶跃输入下峰值反应时间一致,表明有EPS控制的转向响应没有滞后,即时效性有所保证;有、无EPS控制的瞬态响应在角阶跃输入下的稳定时间基本一致,表明有EPS控制的转向稳定性能够保证。此外,装配有EPS的转向瞬态响应具有以下优点:横摆角速度超调量较小,表明转向执行精度较高;稳态横摆角速度较快,根据转向灵敏度为稳态横摆角速度与前轮转角的比值表明其转向灵敏度有所提高。
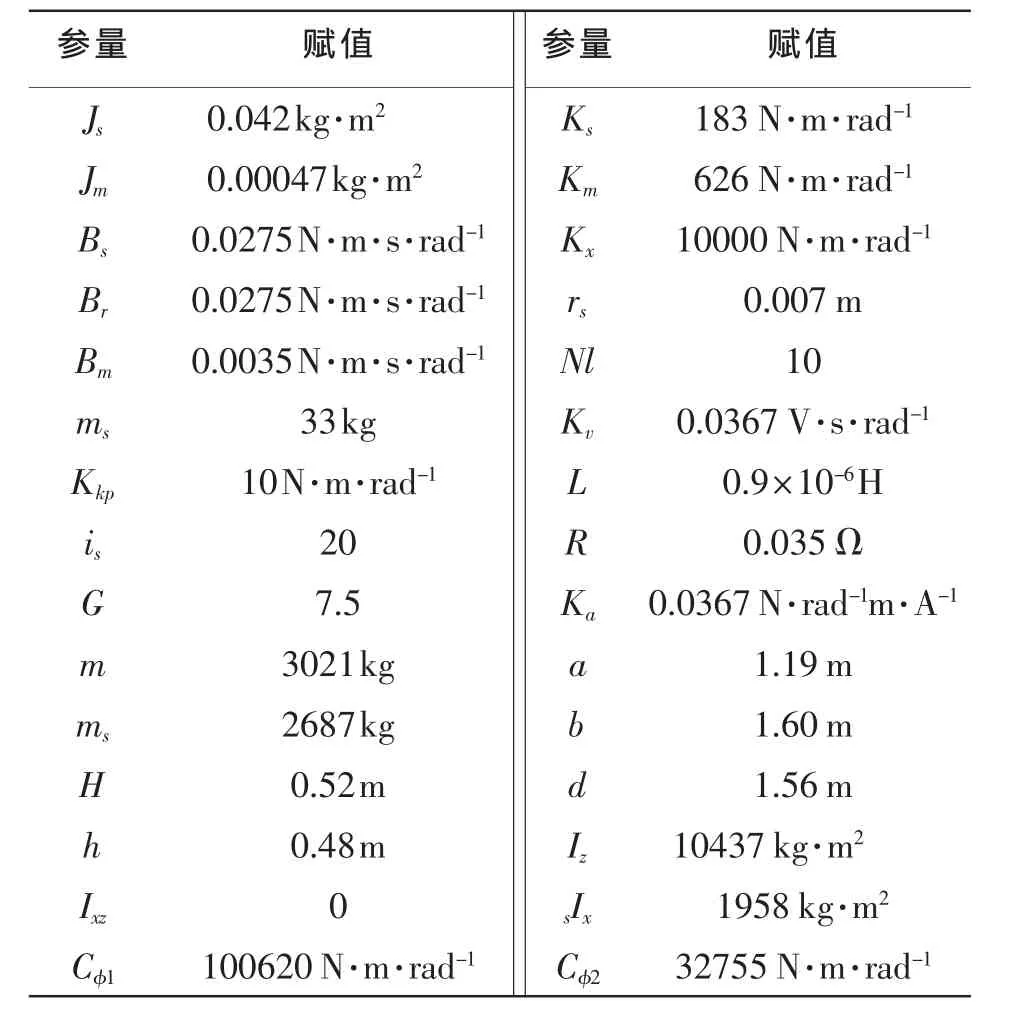
表5 仿真参量值

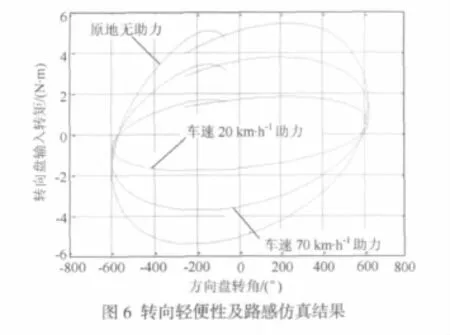
为验证所设计的电动助力转向系统的控制策略及转向轻便性,分别进行了原地无助力、车速20km·h-1、车速 70km·h-1的汽车转向仿真,仿真结果如图6所示。仿真结果表明,原地无助力转向时所需的方向盘输入力矩最大,即驾驶员操作方向盘的感觉最为沉重;当汽车行驶时由于助力的作用,转向盘输入转矩矩迅速减小,表明所设计的系统具有明显的轻便性;伴随车速提高,方向盘输入力矩逐步增大,保证了高速行驶下的路感和可靠性。
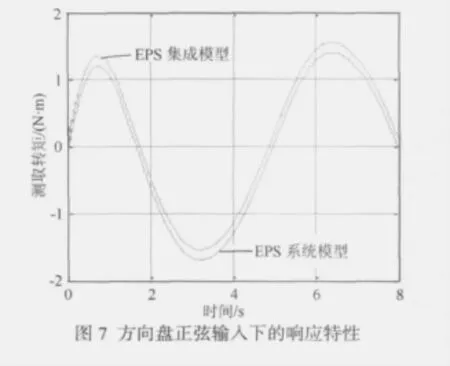
为验证所设计的集成模型能够更好的模拟汽车转向时的动态特性,分别对EPS集成模型和未考虑轮胎回正力矩的EPS系统模型进行了方向盘正弦输入的仿真实验。仿真结果(图7)表明,EPS集成模型考虑了轮胎回正力矩以及车身侧倾影响带来的转向系阻力变化,而EPS系统模型由于在单独仿真过程中,未考虑这些因素的影响而默认轮胎回正力矩是零或是固定常数,造成转向系阻力减弱。因此,EPS集成模型实际作用在转向轴的转矩会略高于EPS系统模型的仿真结果。
7 结 论
通过整合EPS系统模型、轮胎模型以及三自由度整车模型建立了EPS集成模型;从轮胎回正力矩的角度上考虑了车身侧倾角变化对EPS系统的影响,较以往单独对EPS系统建立模型更为全面、客观。集成仿真模型考虑到汽车各系统间的相互影响,能够更好的模拟汽车转向时的动态特性。
仿真结果表明:所设计的系统能够较好的满足对转向轻便型和路感的要求,并具有较高的稳定性,所提出的集成仿真方法客观有效。
[1]王健,丁能根,杨磊,等.EPS控制单元频响特性测试与系 统 辨 识[J].系 统 仿 真 学 报 ,2007,19(16):3843-3845,3849.
[2]胡建军,李彤,秦大同.基于整车动力学的电动助力转向系统建模仿真 [J]. 系统仿真学报,2008,20(6):1577-1581.
[3]吕威,郭孔辉,张建伟.电动助力转向综合前馈和模糊PID反馈的电流控制算法[J].农业机械学报,2010,41(8):10-15.
[4]赵林峰,陈无畏,秦炜华,等.低附着路面条件的EPS控制策略[J].机械工程学报,2011,47(2):109-114.
[5]林逸,施国标,邹常丰,等.电动助力逐项助力控制策略的研究[J].汽车技术,2003(3):8-10.
[6]H.B.Pacejka,I.M.Besselink.Magic Formular Tyre Model with Transient Properties [J].Vehicle System Dynamics Supplement,1997,27:239-249.
[7] Albert R,Barabasi A L.Statistical Mechanics of Complex Networks[J].Science(S0036-8075),1999,286(15):50 9-512.
[8]安部正人.汽车的运动和操纵[M].陈辛波,译.北京:机械工业出版社,1998.
[9] 余志生.汽车理论[M].5版.北京:机械工业出版社,2009.
[10]徐涛,过学迅,杨波,石广林.基于转角的电动助力转向系统回正性能控制[J].湖北汽车工业学院学报,2009(1):4-7+26.
[11]王迅.电动助力转向系统(EPS)技术现状与发展[J].湖北汽车工业学院学报,2008(3):21-24.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
今日农业(2020年16期)2020-12-14 15:04:59
知识经济·中国直销(2018年3期)2018-04-12 06:43:36
传媒评论(2017年8期)2017-11-08 01:47:36
解放军健康(2017年5期)2017-08-01 06:27:42
山东青年(2016年12期)2017-03-02 18:22:48
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
探测与控制学报(2015年4期)2015-12-15 15:00:56
