
基于硬件在环的创新设计开放实验基地实现模式
2011-10-30 12:26:02罗天洪吴不得
重庆理工大学学报(社会科学) 2011年9期
罗天洪,吴不得,李 红
(1.重庆交通大学机电与汽车工程学院,重庆 400074; 2.北京康布尔石油技术发展有限公司,北京 100120)
基于硬件在环的创新设计开放实验基地实现模式
罗天洪1,吴不得1,李 红2
(1.重庆交通大学机电与汽车工程学院,重庆 400074; 2.北京康布尔石油技术发展有限公司,北京 100120)
基于硬件在环的创新设计开放实验基地的建设包括硬件和软件两部分,涉及硬件在环实验的实验模式和试验流程,探讨了构建硬件在环实验平台的技术途径,搭建了平面组合机构的硬件在环测试平台,对该环境下机构的实测和仿真实验结果进行了分析。借助实验基地实现模式的研究,使高校实验室能够更好的开展综合性、开放性实验,学生创新能力的培养能够更科学、有效地进行。
硬件在环;实验基地;实现模式;技术途径
一、引言
目前高校实验室的硬件设备种类和技术条件虽然比以前有了长足的进步,但往往还不能满足创新开放性实验的复杂性和多样性需要,综合性、设计性、创新型实验大都不能很好的进行,这在很大程度上制约着大学教学质量和学生创新能力的发展水平[1]。硬件在环技术作为一种新兴功能强大的仿真技术,其在安全、可行性和成本上都具有显著的优势[2],因此,可以考虑通过虚拟仪器和硬件在环技术的应用,结合网络技术、多媒体技术和接口技术[3],来搭建一个设备种类齐全、手段多样的综合性创新基地平台,以此达到高校建设创新型实验基地的要求。
一个典型的硬件在环(Hardware in the loop)包括用于从被控制系统接收数据的传感器,用于发送数据的传动器,一个用于数据处理的控制器,一个人机界面(HMI),以及一个仿真分析平台。要精确地仿真测试系统中物理上并不存在的部分,一个实时系统是非常必要的。I/O接口是与被测部件交互模拟、数字、测量和总线信号[4],用户可以用它们来产生激励信号,获取用于记录和分析的数据,并提供被测的电子控制单元(ECU)与模型仿真的虚拟环境之间的传感器/执行器交互;操作界面与实时处理器相通,提供测试命令和可视化环境,在大多数情况下,这个部件也提供配置管理,测试自动化,承担分析和报告任务。
硬件在环仿真最显著的特点是可以对实际情况进行很好的模拟,对于高校实验室来说,无论是创新成果的测试还是设计型和开放创新型实验,准备数量种类繁多的硬件设施是不现实也是不必要的[5]。构件基于硬件在环的创新实验基地,可以允许实验者根据平台上提供的虚拟器材自由搭建任意合理的典型实验,或实验系统案例,这一点是该实验基地有别于一般教学实验室的重要特征。硬件在环仿真还可以在真实世界中不能实现的极端条件下对创新成果进行测试,而不用准备全系统所需的实际硬件。除了可以满足教师对各层次实验教学的需求,实验基地还为学生自由搭建实验模型提供了可能,学生可通过虚拟实验平台动手操作,又可自主设计实验,这样可以很好的培养学生的设计能力和创新意识。
二、基于硬件在环的创新实验基地实现模式
(一)硬件在环实验模式
硬件在环技术综合了物理仿真和数学仿真的优点,利用虚拟仪器和仿真技术、网络技术,对实验的模型部分进行灵活快捷的仿真,学生通过对实验平台生成的数据进行分析和总结,得到实验结果。实验基地的综合开放性实验以及对创意成果的测试,构成复杂的采用“目标机构-I/O硬件-实验PC平台-HMI平台”的实验模式。实验基地提供部分实验设备的实验可以采用“目标机构+其它实体机构组合-I/O硬件-实验PC平台-HMI交互平台”模式,如图1所示:
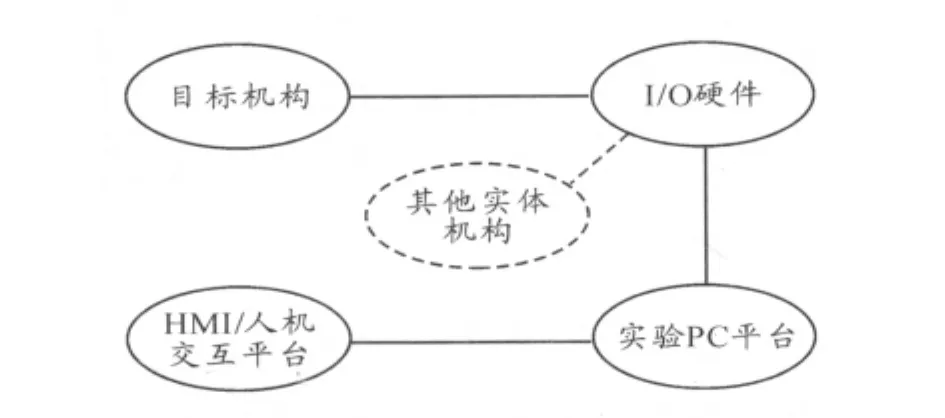
图1 实验模式
(二)创新实验平台
创新实验基地的硬件在环实验除了目标机构外,还包括其它机构、I/O硬件、PC实验平台、HMI人机交互平台4个模块,如图2所示。其他机构指创新实验室可以提供的实验硬件资源,或者实验内容必须的需要直观反映的机构组合。实际机构的运用应考虑这些机构的仿真复杂度,在条件允许的情况下通过运用实际机构来减少实验的前期准备工作,提高实验效率。I/O硬件主要指硬件在环实验所需的数据采集模块,实验平台通过I/O接口与被测机构交换模拟、数字和测量信号,获取用于记录和分析的数据[6-7],并提供被测控制单元(ECU)与仿真虚拟实验平台之间的传感器与执行器交互。数据采集模块主要包含传感器、接口技术和数据转换技术几个方面。一方面通过将实际硬件产生的速度、加速度、位移以及电学等测量信号传送至实验平台以供分析[8-9],另一方面将实验平台的控制信号准确快捷的传递至每一个ECU部件。PC实验平台是整个硬件在环实验平台的“大脑”所在,包含数据实时控制器、虚拟仪器库和数据的分析处理模块。数据处理模块可以选用Labview软件作为开发平台,用Matlab和Simulink作为数学和计算引擎,利用VRML、Workbench等技术实现用户和模型之间的数据交互,并通过JAVA或其他语言进行数据处理模块的具体编写。实时控制器包含物理运动控制和电子仿真控制,通过将数据处理模块的处理结果转化为具体的激励信号,准确、实时的控制目标机构、其它实际机构的机械运动和电子信号,并实时控制虚拟模块的仿真信号。虚拟仪器库,包含元件库、仪器库、模型库以及虚拟仪器组合,是虚拟仪器技术在创新实验基地应用的最直接体现,实验基地事先对常用零件、仪器和简单机构进行仿真,将其分类整理存放,在实验时可以随时调用,同时也将每一次实验的仿真机构模型或者零件模型加以保存,不断充实仪器库的模型容量,进而提高实验效率。HMI人机交互平台与实验PC平台相连,是实验者直接观察实验进程和实验结果的平台,通过现代高性能的运动捕捉技术、图像采集技术和仿真模拟技术的应用,提供测试命令和可视化的实验环境,同时也承担配置管理和结果分析报告任务。
(三)硬件在环实验流程
由于硬件在环技术的特殊性,此类实验需要一定的前期工作,为了提高实验效率,必须对实验流程进行科学规范化的管理,使之有序高效的完成。
1.实验准备工作
硬件在环实验的准备工作可以概括为三个方面:实验方案确定、实验仪器准备和实验平台搭建,如图3所示。实验方案的确定是前期准备的关键环节,关系到整个实验过程能否顺利的进行。实验基地的实验首先应该由实验者本人向实验室管理员提交实验申请,并提交初步的实验方案。实验室在收到申请后由专业老师对实验方案的合理性进行评估,对实验方案不足的地方提出改进意见,并对符合要求的实验确定最终的实验方案,在满足实验目的的基础上争取采用最合理最实用的实验方案。实验仪器的准备环节是整个实验环节的基础,准备实验所需要的设备、仪器等,包括实体机构、仪器的准备以及虚拟模块的准备。仪器库中已有的虚拟仪器可以直接调用,实验平台上没有的可以利用虚拟技术进行模拟仿真。准备工作的第三阶段是搭建实验平台,是前期准备工作很重要的一环。将实际机构根据实验需求进行搭配组合,并连接实验平台,然后在需要的位置安装传感器、测量仪器以及控制仪器,实验PC平台也需要在这个阶段对虚拟仿真仪器及机构进行整合,并建立实时控制模块以及数据处理模块,最终完成整个实验平台的搭建。
2.实验进程的管理
为了便于不同实验的高效进行,并对其进行规范管理,可以将每一个实验根据情况分为申请中、筹备中、试验中、分析总结以及平台重建五种状态,如图3所示。处于实验申请中的实验,实验室只需要对其实验方案把关,筛选合理的实验计划。于筹备中和实验中两种状态的实验可以并行处理,即在每一次的实验进行中,可以同时对计划中的下一次实验进行筹备,包括虚拟机构的仿真以及数据处理模块的编写等。分析总结和平台重建两种状态也可以并行处理,即在实验结束后对结果的分析总结阶段,可以立即搭建下一次实验所需的实验平台。实验基地通过对实验进程的分类管理,可以在保证实验顺利进行的同时,根据硬件在环实验的特殊性,并行处理,极大提高实验基地的实验效率。
3.实验过程及处理
在实验准备工作完成以后,实验室即可根据制定好的实验计划方案进行实验,充分利用硬件在环的巨大优势,灵活快捷的进行仿真实验。在实验进行的过程中,按照实验进程的管理可同时按照计划进行下一次实验的前期准备工作。通过实验的进行,既可以预先检查学生的创意成果的合理性和可靠性,同时也可以开展基于硬件在环的开放型、综合型和创新型实验,以更好的培养学生的创新意识和实践能力。在实验完成以后,即可按照过程管理搭建计划中实验的实验平台,同时根据人机交互平台提供的实验数据,对结果进行分析总结,在验证实验目的的同时进行优化提高。
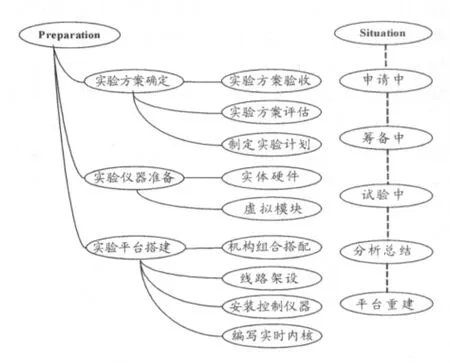
图3 实验准备流程
(四)硬件在环仿真平台的技术途径
实现硬件在环仿真需要解决的问题主要包括:仿真模型的建立,软件平台的建立,接口技术和数据转换技术,编写实时内核(也就是实时控制模块和数据处理模块),以及仪器库的扩充。
①仿真模型建立:硬件在环仿真模型和普通的仿真模型不同,在通过各种仿真软件建立模型本身之后,还必须预留与其他仿真模型和实际硬件的接口技术。② 实验平台的建立:目前流行的硬件在环仿真实验台开发工具主要是dSPACE产品、LabVIEW-RT和xPC目标机系统。可以采用Labview软件为开发平台,用MATLAB和Simulink作为数学和计算引擎。③接口技术和数据转换技术:接口程序使用S函数和MATLAB中特定的专业模块(如XPC或者VR工具箱)来完成,利用VRML、Workbench等技术实现用户和模型之间的数据交互。④实时内核采用MATLAB软件提供的各种功能强大的函数和工具箱来完成,通过JAVA或其他语言进行数据处理模块的具体编写。⑤仪器库的扩充:在实验基地安排学生的仿真培训时,将对常用机构或者仪器的仿真作为学生的训练内容,并将好的作品补充入实验基地的虚拟仪器库中。同时,对学生的课外实践活动中的仿真成果以及教学和科研实验的仿真成果,在征得作者同意的基础上,都可以将其收藏至实验平台的仪器库中,积少成多,不断丰富实验基地的仪器库。
硬件在环仿真是集合多种软硬件技术的复杂系统,在试验过程中必须解决软硬件在接口的数据实时传递问题,因此有必要建立接口管理系统的方法来解决,结构图如图4所示:
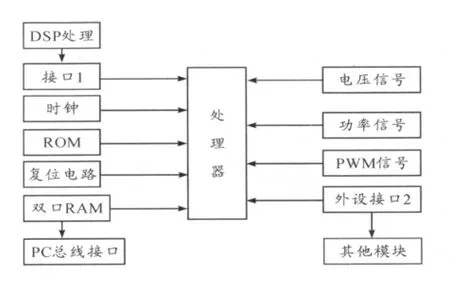
图4 结构图
处理器芯片通过实时准确的采集接口两端的数据信号,以基于双口RAM的存储单元存储相应的数字量,供计算机平台使用,并将计算机系统的输出信号实时准确的转化成每个ECU所需的信号输出。
三、平面机构组合硬件在环测试平台
为更具体的研究硬件在环实验的实现形式,本文利用有限的资源,搭建了平面机构组合的硬件在环测试平台。试验台结构如图5,通过数据采集模块可以实时确定硬件机构的物理运动和电学特征,通过测试模块对机构运动进行测试和数据处理,通过图像采集模块可以为实验进程的实时远程共享提供条件,通过PCI接口协调平台CPU与各模块之间的数据传送。
该平台涵盖了曲柄摇杆机构、曲柄滑块机构、曲柄导杆机构、曲柄摇块机构、凸轮机构、槽轮机构、曲柄导杆摇杆机构、曲柄导杆滑块机构、齿轮机构、齿轮-曲柄摇杆机构、齿轮-曲柄滑块机构、齿轮-曲柄摇块机构、齿轮-槽轮机构、齿轮-曲柄导杆摇杆机构、齿轮-曲柄导杆滑块机构等共15种常见机构,也可以根据需要拼接其他的试验机构,具有一定的开放性和实用性。平台可以通过虚拟测量仪器的运用实现对这些机构的物理运动如位移、速度、加速度的实时测量。通过对机构进行仿真,并搭接实际的测试仪器,该实验平台也可以实时的提供实际测试和虚拟测试的结果对比,具有一定的参考意义。
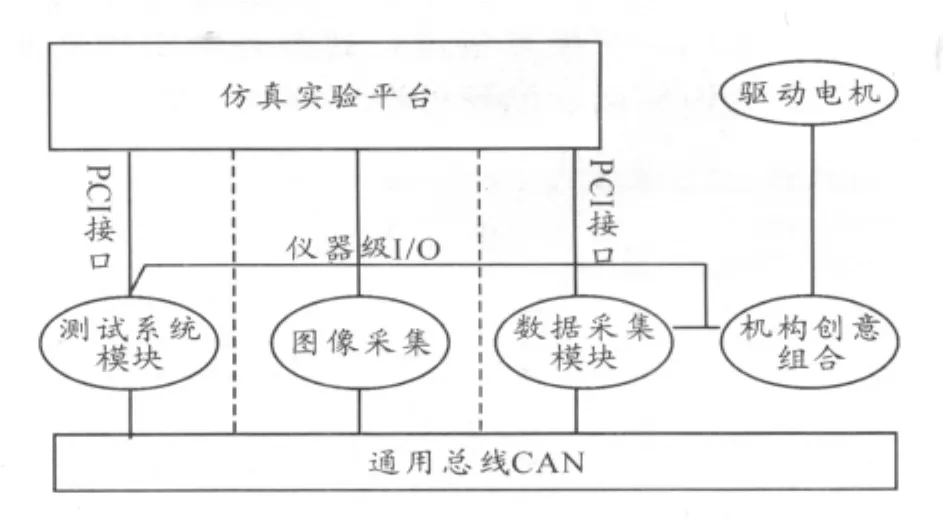
图5 实验台结构图
选取齿轮-曲柄导杆滑块机构为实验对象,其机构结构参数和实物分别如图6所示,机构由电机驱动,由齿轮上的偏转滑块带动摇杆和导杆的运动。平台通过传感器,实现对机构的精确定位,并对机构构件的位移和角度进行测量,由实验平台的测试模块进行计算分析,实现对机构速度、加速度的测量计算。
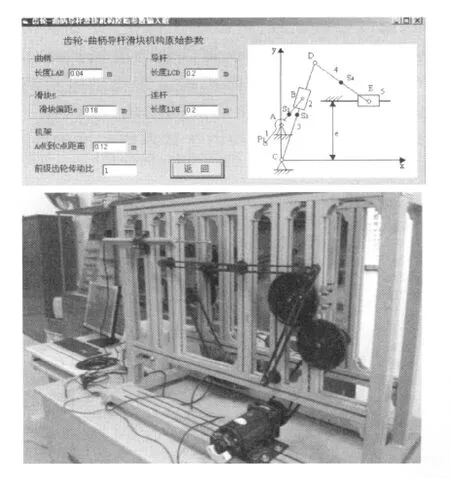
图6 结构图和实物图
实验平台可以通过内置的虚拟测量仪器对机构进行运动测试,以这些平面机构的物理运动为例,如需对机构的物理运动如速度和加速度进行测量,按照常规的方法往往需要昂贵的测试设备,不同的测量量有时还需要安装不同的测试设备,比较麻烦,也不经济。而该实验平台可以通过虚拟的测试仪器,在安装相应传感器的基础上实时的给出机构的物理运动状态,测试不同的物理量也无需安装其他仪器,通过内置的数据处理模块可以很方便的对可换算量进行转换并给出运动曲线。图7为齿轮运动的硬件在环测试结果:
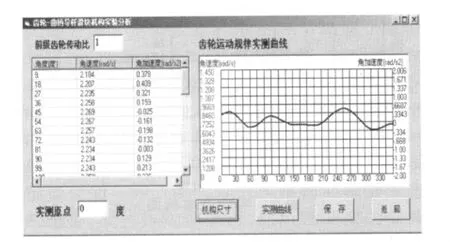
图7 齿轮运动曲线
通过搭接实际的测量仪器,该实验平台也可以对构件进行仿真分析和实测分析,并加以比较。图8为滑块的仿真分析结果,图9为实际测试结果。
仿真分析为“仿真机构+实际测试仪器”的测试结果,实测分析为测试仪器对实际机构的测试结果,通过分析比较,可以得出结论,在准确仿真的基础上,硬件在环测试可以较为准确的给出机构的实际运动情况,实际机构由于受到电机驱动的波动性和机构间连接间隙的影响,曲线有一定程度的波动,而仿真机构由于其理想和准确性,其运动曲线较为平滑。
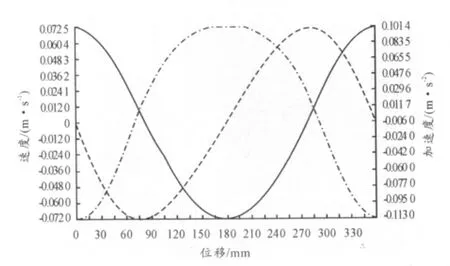
图8 仿真结果
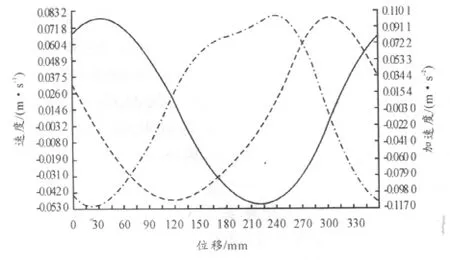
图9 实测结果
通过研究可得出结论,基于硬件在环的创新设计开放实验基地可以在现有的高校实验室基础上发展起来,并可在很大程度上节省硬件设施投入;由于硬件在环实验的灵活性和多选择性,该实验基地为高校开展高水平的综合性和可设计性实验提供了条件,为深化教学改革,探索创新人才培养模式提供了新的思路。
[1]罗天洪.网络环境下机械创新设计开放实验基地组织模式、管理与实践研究[J].中国校外教育,2009 (8):58-59.
[2]陈然,孙冬野,秦大同,等.自动变速器控制系统硬件在环仿真实验台开发[J].现代科学仪器,2009,(6): 23-26.
[3]陈春梅,杨世恩.网络虚拟实验室构建方案[J].实验室科学,2010,13(4):146-148.
[4]Yang,Xiaopin.APF HIL simulation system based on RTDS[J].Electric Power Automation Equipment,2010,57:1237-1244.
[5]Song,Chuan-Xue.Development of ESP HIL test bench based on CAN communication[J].Engineering and Technology Edition,2010,40:71-75.
[6]杨宝生,马修水.应用虚拟仪器技术构建高校绿色实验教学体系[J].教学研究,2010,33(4):67-70.
[7]李模刚.单片机虚拟实验平台建设探索[J].中国西部科技,2010,21(9):18-19.
[8]于泉,荣建.交通控制硬件在环实时仿真平台设计[J].重庆工学院学报:自然科学,2009,23(10):57-60.
[9]张勇,殷承良,熊伟威.基于Matlab的车辆动力学控制交互式硬件在环仿真系统研究[J].机械科学与技术,2006,25(7):821-823.
[10]陈小红.虚拟实验室的研究现状及其发展趋势[J].中国现代教育装备,2010,17:107-109.
[11]Karimi,Shahram.An HIL-based reconfigurable platform for design,implementation,and verification of electrical system digital controllers[J].IEEE Transactions on Industrial Electronics,2010,57:1226-1236.
[12]Omar Faruque M O.Hardware-in-the-loop simulation of power electronic systems using adaptive discretization[J].IEEE Transactions on Industrial Electronics,2010,57:1146-1158.
[13]Montazeri-Gh,Morteza.Real-time multi-rate HIL simulation platform for evaluation of a jet engine fuel controller[J].Simulation Modelling Practice and Theory,2011,19:996-1006.
[14]谭晓玲,王海宝,谢小维.大学本科实验教学模式的探索与实践[J].重庆三峡学院学报,2009(3):113-115.
Implementation Pattern of Open Innovation Design Experimental Platform Based on Hardware in Loop
LUO Tian-hong1,WU Bu-de1,LI Hong2
(1.College of Mechantronics&Automobile Engineering,Chongqing Jiaotong University,400074,Chongqing,China;2.EMBL Petroleum Technology Co.,Ltd.,Beijing 100120,China)
This paper introduced the concepts and composition of the hardware in the loop technology,researched the structure of the experimental base,analyzed the experiment model and test process,summarized the technology approach of how to construct a experimental platform,and set up the testing platform of plane combination mechanism based on hardware in the loop,then discussed the experiment results.The results show that this technology can make innovation activity,creativity and innovation ability be developed systematically,scientifically and efficiently.
HIL;experimental base;implementation model;technology approach
G434
A
1674-8425(2011)09-0116-06
2011-06-10
重庆市高等教育教学改革重点研究项目(092013)资助。
罗天洪(1975—),男,博士,教授,研究方向:虚拟设计、现代实验方法。
(责任编辑 魏艳君)
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08 05:55:58
现代仪器与医疗(2022年2期)2022-08-11 09:53:08
今日农业(2022年1期)2022-06-01 06:18:10
军营文化天地(2018年2期)2018-04-20 07:07:58
百科探秘·航空航天(2017年12期)2018-01-31 02:31:20
股市动态分析(2016年23期)2016-12-27 19:00:03
股市动态分析(2016年7期)2016-09-29 11:17:42
股市动态分析(2016年4期)2016-09-29 08:37:34
股市动态分析(2016年29期)2016-08-04 21:18:52
空间控制技术与应用(2009年2期)2009-12-20 08:30:19
