
人体动态稳定性理论及防跌倒扰动性训练进展
2011-09-28 08:55:46李世明YiChungPaiFengYangTanviBhatt
体育科学 2011年4期
李世明,Yi-Chung Pai,Feng Yang,Tanvi Bhatt
人体动态稳定性理论及防跌倒扰动性训练进展
李世明1,Yi-Chung Pai2,Feng Yang2,Tanvi Bhatt2
稳定性是人体活动的基本要求之一。对于老年人及其他一些特殊人群如中风病人、脑瘫患者等,稳定性具有特别重要的意义。因为,这些特殊人群在最基本的生活过程中都存在着严重的失去身体稳定性的危险。例如,他(她)们在行走过程中不能保持身体平衡,尤其遇到路滑等外界环境的突然变化或外界干扰的情况容易发生跌倒、导致伤残甚至死亡的现象经常可见。国内、外有报道称,跌倒是威胁老年人健康的重要危险因素之一[5,26,62]。在美国,2004年一年内到急诊室治疗因跌倒产生损伤的老年人超过了185万[12]。每年大约有81%~98%的髋关节骨折是缘于跌倒[24,51]。跌倒会导致人体功能减退、独立生活能力下降,甚至在骨折后的前3个月有较严重的死亡危险[63]。总之,跌倒成了威胁人类健康的大敌之一。在中国,由于跌倒的防护意识、防护设施及防护措施等的滞后,后果显得尤其严重。据 WHO报告,中国已于2000年成为世界上因跌倒所致疾病负担最重的国家[55]。
作者单位:1.鲁东大学体育学院,山东烟台264025;2.伊利诺伊大学芝加哥分校应用健康科学学院,伊利诺伊州芝加哥市,60612,美国
为了有效地预防跌倒事故的发生,探索人体稳定性的神经力学机制就显得尤为重要。长期以来,人们对传统的静态稳定性理论了解较多,这对于人体处于静态姿势(如站立)时如何保持身体的稳定性提供了理论支持。而现实中,多数情况下人体是处于运动状态,如走步是人体的一种基本活动形式,利用静态的稳定性理论则很难解释清楚人体处于运动状态时如何才能保持身体稳定性的问题。为此,近些年来人们以步态为载体在动态稳定性理论和防跌倒实践方面进行了大量的有益的探索,并取得了非常有价值的进展。
1 传统的静态稳定性理论
稳定性的概念与平衡紧密相连。定义人体稳定性和定义平衡的方法类似,即人体对线加速度和角加速度的抵抗能力,或者在受到干扰后人体回到平衡或原来位置的能力[2]。根据牛顿力学,如果作用于人体的合力和合力矩是零,那么,人体的线加速度和角加速度就是零,从而人体的线速度和角速度保持恒值或为零,此时人体处于平衡状态,或者说人体处于稳定状态。
稳定性包括静态稳定性和动态稳定性。生物力学的创始人Borelli于1680年所提出的稳定性评价方法奠定了静态稳定性研究的理论基础[13]。根据该稳定性评价方法,要判定一个物体是否处于稳定状态主要看这个物体的质心(COM)或重心(COG)与其支撑面之间的关系。这里的支撑面是指连接每个边缘支撑点的线所包围的内部区域。从静态的角度来看,当人体质心的投影落在支撑面内,人体就处于稳定状态。需要强调的是,此时人体质心的水平速度相对于支撑面是可以忽略的[49],即人体质心的水平速度不足以使人体质心移动到支撑面以外。因此,支撑面的面积就成为了影响稳定性大小的一个重要因素。一般认为,增加支撑面的面积通常会增加稳定性。然而,稳定性是有方向性的,例如,分开一个人的双脚增大支撑面的面积,如果在额状面被推动这个人就很稳定,分开双脚这个动作对矢状面上的稳定性是没有帮助的。因此,要判断稳定性的大小要首先明确方向性。人体的稳定性是指在某一方向上的稳定性,可以由支撑面上重心之投影在该方向上到支撑面边界的距离来确定,而不能笼统地说人体的支撑面的面积大小以及稳定性的大小。这个基础理论至今还有一定的统治地位,在临床检测前庭系统平衡功能的Romberg测试还是根据这套原理来进行的。
事实上,人体完全处于平衡状态的情况是不存在的,即使静止站立人体也无法保证处于持续的绝对平衡状态或稳定状态。在人体静态稳定性大小的测量实践中,有研究[59]用压心(COP)相对于支撑面的位移来评价静态站立时人体稳定性的大小。压心位移越小,稳定性就越大;反之亦然。这种测法的主要依据是压心的偏移是围绕人体质心的位置而振荡[64],二者有一定程度的关联。但是,从概念上要明确人体的压心并不等同于人体质心[56,60],人体质心是三维空间中每个环节质心的加权平均位置。假设所有人体接触点都在测力台上的话,压心是来自一块测力台的垂直地面反作用力矢量的位置,而这个位置取决于足部的位置和踝部的肌肉运动。
压心的位移是人体静态稳定性的较敏感指标[18,67],但是,以此来预测人体动态稳定性则不是最适合的指标[35]。例如,利用静态站立时压心在前后左右方向上的位移而得出的稳定性大小与一个人在走路过程中突然绊倒恢复平衡的能力相关程度较低[62]。人们日常生活中,跌倒多数发生在运动过程中[41]。而在人体运动过程中,人体的质心经常不在支撑面以内,例如,人从坐到站离开椅子时刻人体质心一般在脚跟的后面,人在行走过程中后脚离地时刻人体质心也是落在前脚跟的后面。对于上述人体处于运动状态的情况,静态稳定性理论已无法使用于人体的稳定性问题。而跌倒一般都是在人体处于运动状态下发生的,所以,为了更好地预防跌倒事故的发生,对人体动态稳定性理论的研究就显得尤为重要。
2 动态稳定性理论进展
2.1 动态稳定性的概念
对于动态稳定性而言,目前并无完全、确切的概念,一般是指人体在运动过程中抵制外部干扰并保持身体平衡的能力。在步态研究中,动态稳定性则是指人在走步过程中抵制干扰保持身体直立姿势而不跌倒的能力[45],或者是指不改变原来或预期的支撑面而能保持身体直立姿势的能力。从力学角度出发,动态稳定性仍然是人体质心与支撑面之间的关系问题。例如,人在走步过程中,摆动腿刚离地时,支撑面就完全移动到了前面的支撑腿的脚下,此时,人体质心的投影落在支撑面的后面。从静态稳定性概念来看,显然人体是处于一个不稳定的状态;而当人体质心向前移动超过了支撑面,摆动腿向前着地之前,人体质心的投影也不在支撑面内,而是在支撑面的前面,这时从静态稳定性概念来看,人体也是处于一个不稳定的状态。其实,此时的步态是稳定的,人并没有后倒的倾向。又比如,在站立起来刚离椅子这一瞬间,人体质心往往还落在脚跟之后,但人却也不会往后摔倒。由此可见,静态的概念已不足以解释运动状态的稳定控制。在这两个例子中,尽管开始时人体质心的投影不在支撑面内,看起来人体是不稳定的,而由于质心的速度较大其投影在运动结束时完全可以移进支撑面,此时人体反而进入了稳定状态。反之,如果开始时人体的质心投影在支撑面内,看起来人体是稳定的,但若质心的速度较大其投影在运动结束时移出了支撑面,人体还会是稳定的吗?由此看来,单纯的人体质心位置和支撑面之间的关系已无法说明运动中的人体稳定性大小,还需要考虑人体质心的水平速度[43]。由此看来,人体质心位置和速度的组合是影响人体动态稳定性的关键因素[45],反映了人体质心所处的运动状态,即人体质心位置—速度的坐标点。
2.2 动态稳定性的研究方法
2.2.1 模拟法
开始利用的人体模型是一个简单的两环节模型[45]。该模型是一个倒摆模型,包含的2个环节一个是足,另一个是身体的其余部分(简化为集中在一个点上)。之后又建立了4个环节的人体模型[30],包含足、小腿、大腿和头—臂—躯干(HAT)4个环节。到目前,已经建立了7个环节的人体模型[66],包括左右足、左右小腿、左右大腿和头—臂—躯干(HAT)。在上述建立的人体模型的基础上,可建立动力学方程,对人体运动进行动力学模拟计算。在进行数值模拟时,一个重要的环节是运用优化算法来寻找对应于一个给定初始质心位置的最优初始质心速度。运用最优化算法的目的是在所有可能的人体质心位置—速度组合中,找出能够满足假设给定人体质心位置,使人体质心在速度降到0时其投影能够达到支撑面内部的边界速度。这个边界速度有2个:1)最大可容忍速度,使人体质心速度降为0时人体质心的投影不超过支撑面前面的边界;2)最小必须速度,使人体质心速度降为0时人体质心的投影达到支撑面后面的边界。人体质心速度在两个边界速度之间就能保证人体的动态稳定性。事实上,从广义上讲,静态稳定性是动态稳定性的一种特殊情况,就像直线从广义上讲是曲线的一种特殊情况一样。对于给定位置的人体质心,其速度在这两个最大和最小边界速度以外,人体就是不稳定的,就容易失去平衡,甚至跌倒。假设给定人体质心位置在支撑面的后面,人体质心的速度超过最大边界速度人体就容易向前跌倒,低于最小边界速度人体则容易向后跌倒。
2.2.2 实验法
为了获取有关动态稳定性的原始数据,就需要建立实验模型,使人体在运动过程中受到干扰,然后,再测试其恢复或失去平衡的过程。给人产生外界干扰的方法有很多,对于滑倒来讲可以让人走过冰面、油面等摩擦系数较低的地面而使人体产生滑倒,也可以使人踩上可移动的物体使人产生滑倒。例如,当人从坐的位置站起时(sit-to-stand)突然使脚下所踩的滑板释放[44]或者在人正常走路时突然使脚下所踩的滑板释放[8],都可以使人产生滑动甚至滑倒。利用计算机控制的滑板来模拟路滑易跌倒的情况时,可使受试者无法发现滑板是处于被锁住(无滑)还是释放(滑)状态以模拟真实的生活场境。当然,对于每一种实验干扰都需安装安全保护装置,以免受试者受伤。
在每种有外界干扰或无外界干扰的实验中,可采用摄像系统、测力系统以及肌电测试系统对人体分别进行运动学、动力学和生理学测量,以取得人体保持身体平衡和失衡时的各项原始数据,作为进一步建立动态稳定性理论模型的基础。
2.3 动态稳定性的理论模型
人在矢状面内从坐到站立或是向前行走,人体质心往往落在支撑面的后面,对应每一个给定的质心位置,都可以确定一组最大和最小边界速度。如果对一系列质心位置都通过最优化算法计算出所对应的最大和最小边界速度,就可以在人体质心的位置—速度坐标系内画出人体动态稳定区域(dynamic stability region,DSR)或称可保持稳定的区域(feasible stability region,FSR)[49]。如果人体质心的位置—速度坐标落在动态稳定区域内,人体就是稳定的,如果不在这个区域内,人体就会失去平衡。
2.3.1 无滑动干扰的动态稳定区域
图1为根据对人体在矢状面内从坐到站立或是向前行走进行测量所得数据而优化绘制的无滑动干扰情况下的动态稳定区域[45-47],这个动态稳定区域是向后失衡边界和向前失衡边界所包围的面积。图中x轴代表在矢状面内(前后方向)的人体质心位置,并除以单腿站立时支撑面的前后长度即足长进行归一化处理;y轴代表前后方向上相对于支撑面速度的人体质心速度,并除以(g是重力加速度,h是身体高度)进行归一化处理。从图1中可以看到,如果人体质心的位置在脚跟的后面,其投影则不在静态稳定区域(static stability region,SSR,即足跟与足尖之间的面积)之内,用静态稳定区域来预测此时的人体就处于不稳定状态,人体会失去平衡;而此时的人体质心投影却可能在动态稳定区域以内,用动态稳定区域来预测此时的人体则是稳定的,不会失去平衡。因为此时质心的速度足够大,其投影完全能够进入支撑面内,抵抗人体产生向后失去平衡甚至跌倒的趋势。由此可见,动态稳定区域与静态稳定区域之间存在着显著的差别,不仅在概念上,也包括操作层面。
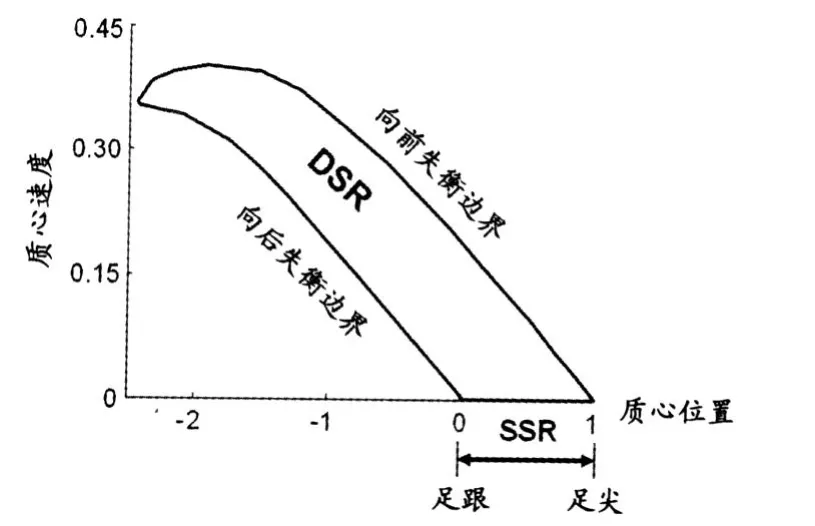
图1 无滑动干扰的动、静态稳定区域的比较示意图(改自 Pai YC and Patton JL,1997)Figure 1. Comparison of Dynamic and Static Stability Region without Slip Perturbation
2.3.2 动态稳定性的评价
前面只是根据动态稳定区域来定性判断一个质心位置—速度状态点是否处于稳定区域。但当要定量地计算某个给定质心点的稳定性大小,则需要给出一个明确统一的判定变量(图2)[7]。人体从坐到站立或向前走时经常出现向后跌倒的情形,以此为例来说明稳度的定义,因此,图2仅给出了人体向后失去平衡的边界。人体动态稳度(s)是指给定的质心位置—速度状态点到向后失衡边界的最短距离。如果给定的质心位置—速度状态点在向后失衡边界的上面,说明是稳定的,人体动态稳度s>0;而如果给定的质心位置—速度状态点在边界的下面,说明是不稳定的,人体动态稳度s<0。人体质心位置—速度状态点在负方向上离向后失衡边界越远,说明人体越容易向后跌倒;反之,人体质心位置—速度状态点在正方向上离向后失衡边界越远,说明人体越不容易向后跌倒,但如果距离过大,超越了向前失衡边界,则会产生向前跌倒的危险。当然,如果要计算人体向前失去平衡时的稳度时,稳度的符号方向则相反,当人体质心位置—速度状态点在向前失衡边界的上面稳度 s<0,人体向前失衡;反之,则稳度 s>0,人体不会向前失衡。

图2 人体动态稳度的定义示意图(改自 Pai YC,Wening JD,Runtz EF,et al,2003)Figure 2. Diagram of Human Body Dynamic Stability
2.3.3 有滑动干扰的动态稳定区域
在人体从坐到站或向前走时突然释放受试者脚下所踩的滑动板时,给人体以滑动的外界干扰,此时人体的滑动腿就会向前滑动,人体的稳定性就会更差,可能会产生向后失去平衡。图3给出了有滑动干扰时的动态稳定区域,并与无滑动干扰时的动态稳定区域进行了比较[47,49]。有滑和无滑干扰相比,相同的人体质心位置要求更大的质心速度才能进入动态稳定区域而不致人体向后失衡,反过来,相同的质心速度则要求质心位置更加移前才不致人体向后失衡。有一个有趣的实验,让41名受试者完成从坐到站的动作,他们的人体质心在坐起时位于图3中的1区域。在这时,尽管这些人处于无滑状态稳定区域的中心位置,他们同时也非常接近有滑干扰条件下的动态稳定区域的向后失衡边界。当第一次突然释放受试者脚下所踩的滑板时,结果所有人都向后失去了平衡。紧接着经历了几次重复的滑动实验后,受试者为了保持身体平衡,在坐起时将人体质心向前调整到了2区域。这时尽管这些人处于有滑状态的稳定区域,他们同时也非常接近无滑干扰条件下的动态稳定区域的向前失衡边界但在其上。当实验者突然又不释放脚下的滑板了,人体没有受到滑动干扰,结果由于补偿过量几乎所有的人又都向前失去了平衡。此后,受试者又将人体质心的运动状态(他的质心位置及其速度)对最新经历过的有滑—无滑进行重新调整,在坐起时由2区域移到了3区域,这样,受试者不论遇到有滑还是无滑条件都不会失去身体平衡了[47,49]。这从力学数学模拟和预测上为预防身体失去平衡提供了理论和实践的支持。
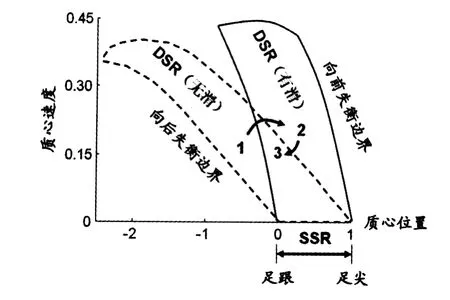
图3 有滑动和无滑动干扰动态稳定区域的比较示意图(改自 Pai YC,Wening JD,Runtz EF,et al,2003)Figure 3. Comparison of Dynamic and Static Stability Region with and without Slip Perturbation
2.4 影响动态稳定区域的因素
影响动态稳定区域形状的因素分为外部因素和内部因素。外部因素是指人所处的外界环境,如脚底与地面的摩擦系数大小,直接影响了动态稳定区域的形状。内部因素是指受试者的自身身体条件,如一个人的解剖学特点、生理学极限包括肌肉力量大小和发力速度等,都直接影响着一个人动态稳定区域的形状,即动态稳定区域的边界位置。这些边界可通过数学模拟和优化的方法确定[45,46,66]。
3 防跌倒的研究进展
3.1 跌倒的生物力学机理
3.1.1 稳度为负
在没有滑动干扰的情况下,人要完成从坐到站或向前行走的动作应当是一件很容易的事,即使对健康的老年人也不是一件很困难的事。当人体质心在支撑面之后时,人体质心的向前速度可以将其投影带到支撑面以内,保持人体的稳定性;等人体质心到达支撑面之前时,人体向前迈步可以建立新的支撑面承载人体质心的投影,也能保持人体的稳定性。正常情况下,人体的质心位置—速度状态始终保持在动态稳定区域以内。当滑动干扰过大时,人体质心的向前速度不足以将质心带入支撑面内,人体质心位置—速度状态在动态稳定区域的向后失衡边界以下,稳度<0,因此,人体就会失去平衡状态。看来,人体质心位置—速度状态不在动态稳定区域以内,稳度<0是人体向后跌倒的预警。
3.1.2 支撑不力
事实上,人体的稳度<0并不一定就意味着跌倒,如果滑动腿能够单腿支撑人体重力或能提供足够的时间完成保护步,如在人体向后失衡时摆动腿的脚向后着地,在几百毫秒之内人体稳定性即可获得恢复[8,37,58,65]。要保证人体不跌倒还需要单腿或双腿能够支撑身体的下降。无论是在绊倒还是滑倒时,下肢不能够提供适时和充分的人体支撑是跌倒的一个重要原因[48,52,54]。这与受到干扰之后下肢的神经肌肉响应有关,而这些响应受到来自脊髓或大脑皮层与任务相关的调节的影响[14,25,28,29]。人在受到突然干扰后的几百毫秒之内下肢肌肉的 EMG信号幅度最大,达到正常行走时4~9倍,并且持续时间较长[17,22,23,61]。但是,往往这样的响应仍不足以阻止人体的下降,或者可能是响应的太迟了。下肢伸肌产生的强直控制(stiffness control)不足以补偿滑动带来的重力的影响。
对于老年人,下肢的支撑不力是引起跌倒的一个非常重要的原因。而导致老年人下肢支撑不力的主要原因有:1)因肌力流失造成的肌力下降。肌力流失是指肌肉质量、力量与品质(包括结构组成、神经支配、收缩性、毛细血管密度、疲劳度与葡萄糖的代谢)流失的一个通称[16]。一般情况下,50岁以上的人,其肌肉力量每10年就会下降12%~14%,肌肉质量每 10年大约下降 6%[34],并且,老化对爆发力的影响更甚于对最大肌力的影响[3]。2)人体老化过程中神经系统控制能力下降。老年人神经传导减慢,中枢整合能力削弱,反应时间延长,中枢和周围神经系统的控制能力下降导致平衡功能失调[1]。以上两个原因决定了老年人具有速度慢、步幅短、抬不高、行不稳、易跌倒的步态特点[38]。
接下来的问题是:是否可以改变这样的不稳定和不足的支撑的状况从而达到预防和避免摔倒的目的?
3.2 防跌倒的扰动性训练方法
近些年来,人们在不断地探索有效的防跌倒训练方案,尤其是针对老年人的适宜训练方案。例如,通过不同组合的静、动态平衡动作来提高人体的平衡控制能力[15,20,57],甚至在水中进行训练以保证安全性[31],利用不同组合的抗阻力量训练来提高下肢的肌肉力量[6,33],利用太极拳练习来综合提高人体的防跌倒能力[27,32]等。上述从不同角度、采用不同方法对人体平衡能力进行训练仅是对防跌倒的辅助的、间接的训练方法,还有一种更加直接的防跌倒适应性训练法近些年来也取得了重要的研究进展。简单地说,这种防跌倒的适应性训练即是让受试者在安全措施保护下直接进行抗跌倒练习,在对跌倒动作的不断适应过程中提高人体对自身姿态的控制能力和对环境干扰迅速做出反应的能力。
防跌倒的扰动训练(perturbation training)属于运动技能的学习和控制范畴,可以用来调动受试者的适应性。练习计划显著地影响着运动学习(motor learning)的效果,特别是组合随机练习将会显著地延长练习效果的保持时间[19]。研究证明,通过这种一次性强化练习(over learning)可以延长步态稳定性的保持时间到4~6个月以上,从而减少身体失衡甚至跌倒事件的发生[9]。已探索的练习计划如下:第1步,让受试者先完成 1组(10次)的正常行走;第2步,通过突然释放受试者脚下所踩的滑板使受试者进行没有预期的1组(8次)滑动测试;第3步,进行1组(3次)无滑动的正常行走;第4步,再进行1组(8次)滑动练习;第5步 ,再进行1组(3次)无滑动练习;第6步,最后进行1组(15次)滑动和不滑动的随机组合测试(其中滑动练习8次)。从第一次滑动练习开始,共计进行了24次滑动练习,并根据运动学习原理在滑动练习期间安排了共计13次无滑练习。为了了解上述练习的效果,之后又安排了4次重测实验,时间间隔依次为1周、2周,1个月和4个月。每次重测都是先让受试者进行8~13次的正常行走练习,之后再进行一次突然的受试者事先没有预期的滑动练习。在重测过程中,受试者只是意识到脚下的滑板有可能会突然被释放产生滑动,但却无法确定滑动会在哪一次练习中发生。
为了评价练习效果,选测两个参数:滑前稳度(滑动脚踏上滑板时的人体稳度)和滑后稳度(摆动腿离地时的人体稳度)。前者反映了人对滑动产生的前馈反应,后者则反映了人对滑动产生后的反馈响应。研究结果[9]显示:1)在练习期间受试者能够很快地提高滑前和滑后的稳度。滑前稳度的提高是因为受试者意识到有滑倒的危险,及时调整身体姿态以使质心位置—速度状态不论滑动是否产生都处于动态稳定区域内,以减小对后续反馈响应的依赖。但是,受试者只是意识到危险还不足以避免身体失衡和滑倒,还必须亲身经历滑动过程才能抵制身体失衡甚至跌倒,意识滑动危险和实际体验滑动过程会产生不同的适应性,后者更加重要,在练习过程中可以改善本体感觉、提高人体神经肌肉的响应能力,从而提高了滑后的稳度。2)一次性的初始练习期过后,练习期结束时的滑前稳度在练习之后的测试期内是可以完全保持的,而滑后稳度有所下降,在练习期内获得的防跌倒能力在一定程度上可以保持至少4个月[10]。进一步的实验已能初步证明,同样的训练运用在老年人中效果至少可以达到6个月以上。
这种适应性训练手段在不同项目的运动中进行练习都会有效,实验表明,利用从坐到站动作的加滑扰动练习(sit-to-stand-slip)与利用行走时的加滑扰动练习(gait-slip)可以取得同样良好的练习效果[10]。而且,在实验室和诊所内通过扰动训练而使人获得的抗跌倒技能可以在不同于受训条件的实际生活场景中发挥作用。实验表明,经过在滑板上随机组合滑倒练习的受训者在油滑的地面上行走,相对于没有经过训练的对照群体(control group),其稳定性显著提高、跌倒的几率明显减小[11]。那么,这些训练效果的神经控制的机理是什么呢?
3.3 防跌倒的动作控制原理
通过练习人能够在不同的活动中适应外界环境突然和没有预期的变化[40,42],而且,老年人这种适应能力也完全存在[53]。这对开展防跌倒练习提供了理论和实验依据。在防跌倒练习中,有两方面的动作控制原理在起着重要作用,即对动作的前馈控制和反馈控制。
3.3.1 前馈控制
前馈控制是指在外界环境发生变化或干扰产生之前由于人对危险的经验、认识和预期而使中枢神经系统(CNS)包括它的运动皮层对运动指令根据经验进行修改后发出以达到对动作进行控制和对即将到来的干扰进行事前调整的目的,属于一种离线控制方式。在前馈控制阶段,神经系统有充分的时间来预计危险的可能性及程度并对动作进行调整以适应环境的变化。在防跌倒的适应性练习过程中,人已经意识到了外界环境变化可能产生的危险,例如,脚下所踩的滑板、湿滑的地面等都会导致人的失衡和滑倒,神经系统就会通过前馈控制对动作进行适当的预调整。这些预调整充分说明了神经系统在控制人体稳定性上的预测作用[4]。
在防跌倒的适应性练习过程中,神经系统通过前馈控制不断调整人体姿势,如通过减小步长、平脚着地、加大膝屈等动作使人体质心的位置更加向前,提高了滑前稳度。这些姿态的改变也可以直接减小人体对地面摩擦阻力的要求,对滑动开始后人运用“走过”(walkover)和“滑过”(skate-over)的动作技巧来抵御跌倒有很大的影响。而这两种技巧成功的运用都会使摆动腿向前迈步来防止人体跌倒。而且,前馈控制的运用还会减小人对后续反馈控制的依赖。由此可知,提高前馈控制是运动学习和适应性训练的最主要的机制之一。
3.3.2 反馈控制
反馈控制是指人的中枢神经系统和外周神经系统(PNS)对外界环境发生变化或干扰产生之后对动作进行的快速调整,属于一种在线控制方式。这些调整的神经机制包括调动脊柱神经反射(spinal reflexes)和超脊柱(supraspinal)姿态自动保护性反应(automatic posture response),前者往往不足以对抗大幅度或大强度的干扰,后者由于可以来自于脑干(brainstem)或者出自于大脑皮层的反射,这类反应往往可以干扰到人体所有的四肢和躯干,反应也表现的较为剧烈,因此,相对而言后者就更为有效。在防跌倒的适应性练习中,尽管前馈控制可以减小对反馈控制的依赖,但却无法达到完全替代的程度。因为意识到滑动的危险只能改变滑动腿着地时的运动学参数,而只有经过多次体验滑动的过程才能改变滑前肌肉活动和滑动脚着地时与地面的相互作用力。同时,适应性练习还可以提高反馈控制的效能,主要表现有保护步的步长减小、反应时间缩短等。在提高重力支撑方面,适应性练习主要是提高了膝关节伸肌完成向心收缩输出正功的能力[49]。
根据外界环境发生变化和干扰产生的程度不同,反馈控制所发出的动作信号强度也不同,表现出不同的动作技巧。对于小幅度和慢速度的干扰主要是依靠踝关节的动作技巧来抵制不稳定,常称为“踝技巧”(ankle strategy)[21,28];对于大幅度和快速的干扰,因其涉及躯干、髋、膝、踝等多个环节的相互协调动作,其中髋关节起主导作用来抵抗不稳定,常称为“髋技巧”(hip strategy)[39];对于更大幅度、更大速度的干扰,以致需要通过扩大或改变支撑面才能保持稳定的情况,则需要向前或向后踏步才能抵御不稳定,这样的技巧常称为“踏步技巧”(stepping strategy)[37]。因而,提高反馈控制是动作学习的另一个重要机制。
4 小结
随着世界范围内老龄化社会问题的日益严重,以及一些有运动障碍的特殊群体的扩大,跌倒已成为一个世界性的社会问题。人体动态稳定性理论是防跌倒研究的理论基础,目前已经取得了有价值的进展,但离实质性地解决问题还有相当大的差距,将来仍需在以下几个方面开展更加深入的研究:1)不同环境、不同状态下的人体动态稳定性理论的探索、总结;2)人体跌倒及预防跌倒中的神经力学机制研究;3)更加有效地预防跌倒的训练方法、程序的探索及推广。随着上述研究的逐步深入,预防跌倒问题有望得到突破性解决。
[1]陈峥,崔德华,张洪林,等.老年跌倒综合症[J].中国老年学杂志,2010,30(19):2863-2866.
[2]李世明.运动生物力学英汉双语教程[M].北京:人民体育出版社,2008.
[3]刘宇,彭千华,田石榴.老年人肌力流失与肌肉疲劳的肌动图研究[J].体育科学,2007,27(5):57-64.
[4]ARUIN A S,LATASH M L.The role of motor action in anticipatory postural adjustments studied with self-induced and externally triggered perturbations[J].Exp Brain Res,1995,106:291-300.
[5]BAKER S P,HARVEY A H.Fall injuries in the elderly[J].Clin Geriatr Med,1985,1:501-512.
[6]BARRETT C J,SMERDEL Y P.A comparison of community-based resistance exercise and flexibility exercise for seniors[J].Aus J Physiother,2002,48(3):215-219.
[7]BHATT T,PAI Y C.Long-term retention of gait stability improvements[J].J Neurophysiol,2005,91:1971-1979.
[8]BHATT T,WENINGJ D,PAI Y C.Influence of gait speed on stability:recovery from anterior slips and compensatory stepping[J].Gait Posture,2005,21:146-156.
[9]BHATT T,WANG E,PAI Y C.Retention of adaptive control over varying intervals:prevention of slip-induced backward balance loss during gait[J].J Neurophysiol,2006,95:2913-2922.
[10]BHATT T,PAI Y C.Prevention of slip-related backward balance loss:the effect of session intensity and frequency on longterm retention[J].Archives Phys Med Reh,2009,90:34-42.
[11]BHATT T,PAI Y C.Generalization of gait adaptation for fall prevention:from moveable platform to slippery floor[J].J Neurophysiol,2009,101:948-957.
[12]BIERYLA K A,MADIGAN M L,NUSSBAUM M A.Practicing recovery from a simulated trip improves recovery kinematics after an actual trip[J].Gait and Posture,2007,26:208-213.
[13]BORELLI G A.De Motu Animalium(Translated by Maquet,P.,1989)[M].Berlin:Springer Verlag,1680.
[14]BRETZNER F,DREW T.Motor cortical modulation of cutaneous reflex responses in the hindlimb of the intact cat[J].J Neurophysiol,2005,94:673-687.
[15]CAMPBELL A J,ROBERTSON M C,GARDNER M M,et al.Randomised controlled trial of a general practice programme of home based exercise to prevent falls in elderly women[J].BMJ,1997,315(7115):1065-1069.
[16]CARMELIE,COLEMAN R,REZNICK A Z.The biochemistry of aging muscle[J].Exp Geront,2001,37(4):477-489.
[17]CHAM R,REDFERN M S.Lower extremity corrective reactions to slip events[J].J Biomech,2001,34:1439-1445.
[18]COHEN H,BLATCHL Y C A,GOMBASH L L.A study of the clinical test of sensory interaction and balance[J].Physical Therapy,1993,73:346-351,discussion 351-354.
[19]DEL REY P.Training and contextual interference effects on memory and transfer[J].Res Q Exe Sport,1989,60:342-347.
[20]DIBREZZO R,SHADDEN B B,RAYBON B H,et al.Exercise intervention designed to improve strength and dynamic balance among community-dwelling older adults[J].J Aging Phys Act,2005,13(2):198-209.
[21]DIENER H C,HORAK F B,NASHNER L M.Influence of stimulus parameters on human postural responses[J].J Neurophysiol,1988,59:1888-1905.
[22]DIETZ V,TRIPPEL M,DISCHER M,et al.Compensation of human stance perturbation:selection of the appropriate electromyographic pattern[J].Neurosci Lett,1991,126:71-74.
[23]ENGJ J,WINTER D A,PATLA A E.Strategies for recovery from a trip in early and late swing during human walking[J].Exp Brain Res,1994,102:339-349.
[24]HEDLUND R,LINDGREN U.Trauma type,age and gender as determinants of hip fracture[J].J Orthop Res,1987,5:242-246.
[25]HIEBERT G W,GORASSINI M A,J IANG W,et al.Corrective response to loss of ground support during walking,II:comparison of intact and chronic spinal cats[J].J Neurophysiol,1994,71:611-622.
[26]HOLBROOK T L,GRAZIER K,KELSEYJ L,et al.The frequency of occurrence,impact,and cost of selected musculoskeletal conditions in the United States[J].AAOS,1984.
[27]HONG Y,LI J X,ROBINSON P D.Balance control,flexibility and cardiorespiratory fitness among older Tai Chi practitioners[J].Br J Sports Med,2000,34(1):29-34.
[28]HORAK F B,NASHNER L M.Central programming of postural movements:adaption to altered support-surface configurations[J].J Neurophysiol,1986,55:1369-1381.
[29]HORAK F B,DIENER H C,NASHNER L M.Influence of central set on human postural responses[J].J Neurophysiol,1989,62:841-853.
[30]LQBAL KAMRAN,PAI YI-CHUNG.Predicted region of stability for balance recovery:motion at the knee joint can improve termination of forward movement[J].J Biomechanics,2000,33:1619-1627.
[31]ITSHAK MELZER,ORI ELBAR,IRIT TSEDEK,et al.A water-based training program that include perturbation exercises to improve stepping responses in older adults:study protocol for a randomized controlled cross-over trial[J].BMC Geriatrics,2008,8:19.
[32]LAN C,LAI J S,CHEN S Y,et al.12-month Tai Chi training in the olderly:its effect on health fitness[J].Med Sci Sports Exe,1998,30(3):345-351.
[33]LORD S R,CAPLAN G G A,WARD J A.Balance,reaction time,and muscle strength in exercising and nonexercising older women:a pilot study[J].Arch Phys Med Rehabil,1993,74(8):837-839.
[34]L YNCH N A,METTER EJ,LINDLE R S,et al.Muscle quality.I.Age-associated differences between arm and leg muscle groups[J].J Appl Physiol,1999,86(1):188-194.
[35]MAKI B E,HOLLIDAY P J,TOPPER A K.A prospective study of postural balance and risk of falling in an ambulatory and independent elderly population[J].JGerontology:Med Sci,1994,49A:M72-84.
[36]MARIGOLD D S,PATLA A E.Strategies for dynamic stability during locomotion on a slippery surface:effects of prior experience and knowledge[J].J Neurophysiol,2002,88:339-353.
[37]MCLLROY W E,MAKI B E.Age-related changes in compensatory stepping in response to unpredictable perturbations[J].J Gerontology,Med Sci,1996,51A(6):M289-296.
[38]MEANS K M.The obstacle course:a tool for the assessment of functional balance and mobility in the elderly[J].J Rehabil ResDev,1996,33(4):413-429.
[39]NARDONE A,GIORDANO A,CORRA T,et al.Responses of leg muscles in humans displaced while standing:effects of types of perturbation and of postural set[J].Brain,1990,113:6-84.
[40]NASHNER L M.Adapting reflexes controlling the human posture[J].Exp Brain Res,1976,26:59-72.
[41]OWINGS T M,PAVOL M J,FOLEY K T,et al.Measures of postural stability are not predictors of recovery from large postural disturbations in healthy older adults[J].J Am Geriatrics Soc,2000,48:42-50.
[42]OWING T M,PAVOL M J,GRABINER M D.Mechanisms of failed recovery following postural perturbations on a motorized treadmill mimic those associated with an actual forward trip[J].Clin Biomech,2001,16:813-819.
[43]PAI Y C,NAUGHTON B J,CHANG R W.Control of dynamic transfer during sit-to–stand among young and elderly individuals[J].In Posture and Gait:Control Mechanisms(Edited by Woollacott M and Horak F),1992,2:301-304.University of Oregon,Eugene,OR.
[44]PAI Y C,NAUGHTON B J,CHANG R W,et al.Control of body centre of mass momentum during sit-to-stand young and elderly adults[J].Gait Posture,1994,2:109-116.
[45]PAI Y C,PATTON J L.Center of mass velocity-position predictions for balance control[J].J Biomechanics,1997,30:347-354.
[46]PAI Y C,IQBAL KAMRAN.Simulated movement termination for balance recovery:can movement strategies be sought to maintain stability in the presence of slipping or forced sliding[J].J Biomechanics,1999,32:779-786.
[47]PAI Y C,WENING J D,RUNTZ E F,et al.Role of feedforward control of movement stability in reducing slip-related balance loss and falls among older adults[J].J Neurophysiol,2003,90:755-762.
[48]PAI Y C,YANG F,WENING J D,et al.Mechanisms of limb collapse following a slip among young and older adults[J].J Biomech,2006,39:2194-2204.
[49]PAI Y C,BHATT T.Repeated-slip training:an emerging paradigm for prevention of slip-related falls among older adults[J].Physical Therapy,2007,87(11):1478-1491.
[50]PAI Y C,BHATT T,WANG E,et al.Inoculation against falls:rapid adaptation by young and older adults to slips during daily activities[J].Archives Physical Med Rehabilitation,2010,91:452-459.
[51]PARKKARIJ,KANNUS P,PALVANEN M,et al.Majority of hip fractures occur as a result of a fall and impact on the greater trochanter of the femur:a prospective controlled hip fracture study with 206 consecutive patients[J].Calcif Tissue Int,1999,65:183-187.
[52]PAVOL M J,OWINGS T M,FOLEY K T,et al.Mechanisms leading to a fall from an induced trip in healthy older adults[J].J Gerontol A Biol Sci Med Sci,2001,56:M428-M437.
[53]PAVOL M J,RUNTZ E F,EDWARDS B J,et al.Age influences the outcome of a slipping perturbation during initial but not repeated exposures[J].J Gerontol A Biol Sci Med Sci,2002,57:M496-M503.
[54]PAVOL M J,PAI Y C.Deficient limb support is a major contributor to age differences in falling[J].J Biomech,2007,40:1318-1325.
[55]PEDEN M,MCGREE K,SHARMAG.The Injury Chart Book:A Graphical Overview of the Global Burden of Injuries[M].Geneva:World Health Organization,2002.
[56]ROBERTS TDW,STENHOUSE G.The nature of posture sway[J].Agressologie,1976,17A:11-14.
[57]ROBERTSON M C,CAMPBELL A J,GARDNER M M,et al.Preventing injuries in older people by preventing falls:a meta-analysis of individual-level data[J].J Am Geriatr Soc,2002,50(5):905-911.
[58]ROGERS M W,HEDMAN L D,JOHNSON M E,et al.Triggering of protective stepping for the control of human balance:age and contextual dependence[J].Brain Res Cogn Brain Res,2003,16:192-198.
[59]SHIMBA T.An estimation of center of gravity from force platform data[J].J Biomechanics,1984,17:53-64.
[60]SPAEPEN A J,VRANKEN M,WILLIAMS E J.Comparison of the movements of the center of gravity and center of pressure in stabilometric studies[J].Agressologie,1977,18:109-113.
[61]TANG P F,WOOLLACOTT M H.Inefficient postural responses to unexpected slips during walking in older adults[J].J Gerontol A Biol Sci Med Sci,1998,53:M471-480.
[62]TINETTI M E,SPEECHLEY M,GINTER S F.Risk factors for falls among elderly persons living in the community[J].N Eng J Med,1988,319:1701-1707.
[63]TINETTI M E,WILLIAMS C S.The effect of falls and fall injuries on functioning in community-dwelling older persons[J].J Gerontol A Biol Sci Med Sci,1998,53(2):112-119.
[64]WINTER D A.Human balance and posture control during standing and walking[J].Gait&Posture,1995,3:193-214.
[65]WU M,J I L,J IN D,et al.Minimal step length necessary for recovery of forward balance loss with a single step[J].J Biomech,2007,40:1559-1556.
[66]YANG F,ANDERSON F C,PAI Y C.Predicted threshold against backward balance loss in gait[J].J Biomechanics,2007,40:804-811.
[67]YONEDA S,TOKUMASU K.Frequency analysis of body sway in the upright posture.Statistical study in cases of peripheral vestibular disease[J].Acta Oto-Laryngologica,1986,102:87-92.
Development of Dynamic Stability Theory of Human Body and Perturbation Training for Fall Prevention
LI Shi-ming1,Yi-Chung Pai2,Feng Yang2,Tanvi Bhatt2
随着世界范围内老龄化社会问题的日益严重,以及一些有运动障碍的特殊群体的扩大,致使跌倒成为了一个严重的社会问题。人体动态稳定性理论是防跌倒研究的理论基础,目前已经取得了有价值的进展。人体动态稳定性理论不同于静态稳定性理论,后者给出的是人体质心位置与支撑面之间的相对位置关系,而前者增加了人体质心速度的因素,给出的是人体质心位置—速度状态与动态稳定区域之间的关系,可利用稳度来判定人体所处的稳定状态,甚至定量评价人体的动态稳定程度。影响跌倒的主要因素有二:稳度为负和支撑不力。在防跌倒的研究中进行适应性练习可显著地提高滑前稳度和滑后稳度,分别体现了前馈控制和反馈控制对人体动态稳定性的神经生理影响。
动态稳定性;防跌倒;扰动性训练;人体质心;位置—速度
Given the fact of the aging society across the world and the enlarging population with disability,fall is becoming a serious social problem.As the theoretical basis of fall prevention,the dynamic stability theory of human body has achieved an important improvement.Dynamic stability differs from static stability with the latter characterizing the relationship between the positions of center of mass(COM)of human body and its base of support.However,the former takes into consideration the factor of COM velocity besides the position;and describes the dynamic relationship between COM motion state(i.e.,the combination of position&velocity of COM of human)and dynamic stability region.Stability can be used to determine if the human body is in stable condition.Further,it can be employed to evaluate the degree of stability of human quantitatively.There are two contributing factors which cause falls:instability and weak weight support.Perturbation training in fall prevention can improve stability before and after slip,which represents the neurophysiology influences of feed-forward control and feedback control on dynamic stability of human body respectively.
dynamic stability;f all prevention;perturbation training;center of mass of human body;position-velocity
G804.6
A
1000-677X(2011)04-0067-08
2010-10-18;
2011-03-21
李世明(1969-),男,山东栖霞人,教授,博士,硕士研究生导师,研究方向为运动控制与健康促进,Tel:(0535)6681336,E-mail:leesm0503@sohu.com;Yi-Chung Pai(1952-),男,美籍华人,教授,博士,博士研究生导师,研究方向为临床步态与运动分析,E-mail:cpai@uic.edu;Feng Yang(1976-),男,副教授,博士,研究方向为人体运动分析和计算生物力学,E-mail:yangf2050@yahoo.com;Tanvi Bhatt(1975-),女,美籍印度人,副教授,博士,研究方向为运动控制,E-mail:tanvib@yahoo.com。
1.School ofPhysicalEducation,Ludong University,Yantai 264025,China;2.College of Applied Health Sciences,University of Illinois at Chicago,Illinois Chicago 60612,USA.
猜你喜欢
中国心血管杂志(2022年2期)2022-11-25 17:29:20
中国心血管杂志(2022年4期)2022-11-25 16:59:06
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
中国心血管杂志(2021年6期)2021-01-02 08:18:16
中国心血管杂志(2019年3期)2019-01-04 16:25:09
制造技术与机床(2018年11期)2018-11-23 01:08:02
意林(绘英语)(2018年1期)2018-04-28 01:21:42
城市轨道交通研究(2015年11期)2015-02-27 11:02:50
雷达学报(2014年4期)2014-04-23 07:43:07
