基于小卫星编队的稀疏孔径遥感技术
2011-09-18 02:32:30原育凯陈宏宇沈学民
上海航天 2011年5期
原育凯,陈宏宇,沈学民、2
(1.上海微小卫星工程中心,上海 200050;2.中国科学院 上海技术物理研究所,上海 200083)
0 引言
高分辨率的空间光学遥感器代表了空间遥感技术领域的制高点。在工作于近地轨道的对地观测载荷中,可见光波段的地面分辨率已达到分米级,如美国的KH-11,KH-12锁眼侦察卫星的口径已大于2 m[1]。该尺寸的口径除导致设计、加工和装调的巨大困难及高昂的成本外,其体积和质量已基本达到了目前运载发射能力的极限[1-5]。将衍射成像的分辨率公式用于红外波段,欲达到与可见光同等的角分辨率,红外波段的口径约需提高1个量级。此外若需使用对地静止轨道进行对特定地区的连续观测,为获得与近地轨道可比拟的地面分辨率,各种光学口径则需提高约2个量级。显然,传统衍射受遥感观测要求限制已无法满足上述需求。
随着天文学研究对更高分辨率观测需求的日益强烈,在20世纪40年代国外提出了合成孔径概念,并使用了复合天线技术,逐步弥补地面单个射电望远镜的孔径不足[6]。之后,这项技术被用于解决空间和地面望远镜系统。1970年,MEINEL提出了光学合成孔径技术,光学合成孔径亦称为光学综合孔径,是将多个较小口径的光学元件或光学系统进行精确的排列,使通过各子孔径的光束在焦平面上满足一定的相位条件,实现光场的相干叠加,从而达到与之通光口径相当的单一大口径系统的衍射极限分辨率[7]。稀疏孔径是合成孔径的一种实现形式,稀疏沿用了雷达技术的概念,相对完全填充孔径而言,仅占用了很小一部分。稀疏孔径系统通过改变子孔径的空间布局和其间的疏密程度,可达到远高于有相同接收面积的单个孔径的分辨率。本文对稀疏孔径技术进行了综述。
1 稀疏孔径技术基本原理
1.1 干涉光学成像原理
传统单孔径成像光学系统的成像是一个衍射受限过程,角分辨率受该孔径衍射能力的限制,与波长成正比,与孔径尺度成反比。将2或多个成像孔径的光束进行波前叠加后,除单孔径各自的衍射成像外,如孔径间相位相干,其成像就会呈现干涉性,即各子孔径对同一光源,采用分波面方式形成干涉。其优点是形成了更大的口径,一方面提高了系统的角分辨率,另一方面能探测更微弱的信号。目前,干涉成像方式有迈克尔逊干涉和斐索干涉两种[2、8]。
1.1.1 迈克尔逊干涉
亦称为瞳平面干涉。这是一种等倾干涉,其过程为:目标发出的光束被一定空间距离的两个孔径接收,通过半透半反表面实现叠加,最终在探测器面上形成干涉图样。所得图像是目标在特定空间频率的频谱即傅里叶变换,故还需通过反变换重建原始图像。迈克尔逊干涉的原理如图1所示。其过程为干涉计测量物体的傅里叶变换;改变基线的取向和长度,获得不同空间频域的采样,采样足够充分时可填充整个空间频域;通过傅里叶反变换重建图像。

图1 迈克尔逊干涉原理Fig.1 Prototype of Michelson interferometery
对迈克尔逊干涉系统来说,其空间应用一般是深空探测。BRACEWELL在1978年提出了对迈克尔逊干涉的一种改进:在两束相干光合成前加入半波长的相移,以消除中心视场的强光源而使轴外视场的暗弱目标成像,即消零干涉测量,该原理成为近年空间探测的物理学依据[9]。如欧洲的Darwin计划,参考地球大气中主要成分(水、臭氧、甲烷和二氧化碳等)的红外谱线,通过探测太阳系外的行星大气红外光谱寻找适合生命居住的星体[10-11]。NASA提出了类似计划(TPF-I生命行星搜寻干涉仪)[12]。
1.1.2 斐索干涉
亦称为像平面干涉[8]。它通过掩模实现大孔径的部分孔径成像,或多个独立光学系统的光束经准直、合并后再进行聚焦成像,故能直接输出目标的图像。斐索干涉的原理如图2所示。

图2 斐索干涉原理Fig.2 Prototype of Fizeau interferometery
斐索型干涉的实现多采用以下两种方式。一种是将虚拟大口径主镜的部分表面作为子镜面设计、加工并对其精确定位,使用共同的次镜将光束会聚成像[图2(b)]。这样的系统原理较易理解,是降低大口径的加工难度和减轻整机质量而采取的折中,因此当应用于空间任务时,多会融入用于折叠发射的展开机构,或实现航天器对接或绳系的分布式设计。其缺点是各子镜面须严格按照其在虚拟主镜的相对位置定位,定位精度对像质的影响非常明显,且由于其表面曲率无法改变,光学系统的参数单一,需进行专门的设计和加工。另一种稀疏系统结构中各子孔径均为独立望远镜,其输出光束为经过准直的平行光束,通过对各子孔径的空间分布进行定相控制,能将各子光束经光束耦合形成干涉并聚焦成像,也称为相控望远镜阵[图2(c)]。与共用次镜结构相比,其优点是形成各子孔径的望远镜相互独立,可进行模块化设计制造甚至基于现有产品进行采购组装,以便实现各种空间构型,且能不断扩充稀疏系统的规模,以实现更大等效孔径和更高光通量。因此,这种构型已成为目前国内外稀疏孔径研究的热点。
迈克尔逊干涉的角分辨率仅与基线长度有关,基线越长则分辨率越高,但由于口径过于稀疏导致收集的信号非常微弱,以及需要改变基线长度和方向采集目标不同的空间频率,整个采集过程所需时间很长,更适于小视场、相对静止的天文目标的探测。斐索干涉与传统独立口径系统更接近,可实现对大视场内快速运动目标的干涉成像,更适于对地观测。
1.2 稀疏孔径研究内容
稀疏孔径技术的研究主要涉及子孔径的空间布局、相位一致和图像恢复三部分内容。
1.2.1 子孔径的空间布局
用于探测的稀疏孔径系统通常只对特定和极高的空间频率感兴趣。为此,其空间布局很广。
欧空局的基于消零干涉技术的Darwin计划采用空间构型是:4只携带口径约2 m反射镜的航天器排成一个矩形,间距7~168 m(消零干涉方式)或20~500 m(天体物理观测),将入射光聚焦到中心、距离光束收集平面约1 200 m处的光束合成航天器上。当反射镜组处于500 m基线的状态时,对波长10μm的入射光,角分辨率可达0.005″[10]。Darwin计划还提出了三角形、线形、菱形、X形和六边形的空间布局[11]。美国的TPF-I计划也有类似构型,如图3所示。根据系统子孔径配置数量和观测任务需求,还需对空间布局进行旋转和重构的调整。用于成像的稀疏孔径系统,其子孔径空间布局直接影响最终成像质量。良好的空间排列可减少频率的冗余,用最小的填充系数获得较高的像质和分辨率。据文献报道,常用的构型有环面、环形、三臂(Y形)、Golay,以及其他复合结构等,如图4所示[8-13]。

图3 美国TPF-I计划的编队构型Fig.3 Prototype of American TPF-I formation flying
环面形结构其实是一种特殊的有中心遮挡的单独孔径,其中心孔的尺度和镜面外径接近。在其二维MTF分布中,其截止频率较高且圆周上分布均匀,但明显的缺点是除中心区域外,其传函整体处于很低的水平。
Golay结构是20世纪70年代提出的一种具冗余自相关的紧凑点阵列分布,已被广泛用于稀疏孔径成像,如美国麻省理工学院的ARGOS和空军研究实验室(AFRL)的UltraLITE卫星分别使用了Golay-3,Golay-6结构型式[14]。ARGOS和UltraLITE的Golay结构如图5所示[2、15]。
三臂结构是射电阵望远镜最先采用的布局型式[16]。位于美国新墨西哥州的特大天线阵(VLA)微波波段的角分辨率可达毫角秒量级。之后被光学稀疏孔径借鉴,但其传函的空间分布不均匀,呈现明显的六角形。
1.2.2 相位一致

图4 常用稀疏孔径布局及其调制传递函数(MTF)Fig.4 Common used sparse aperture prototype and its modulation transfer function(MTF)
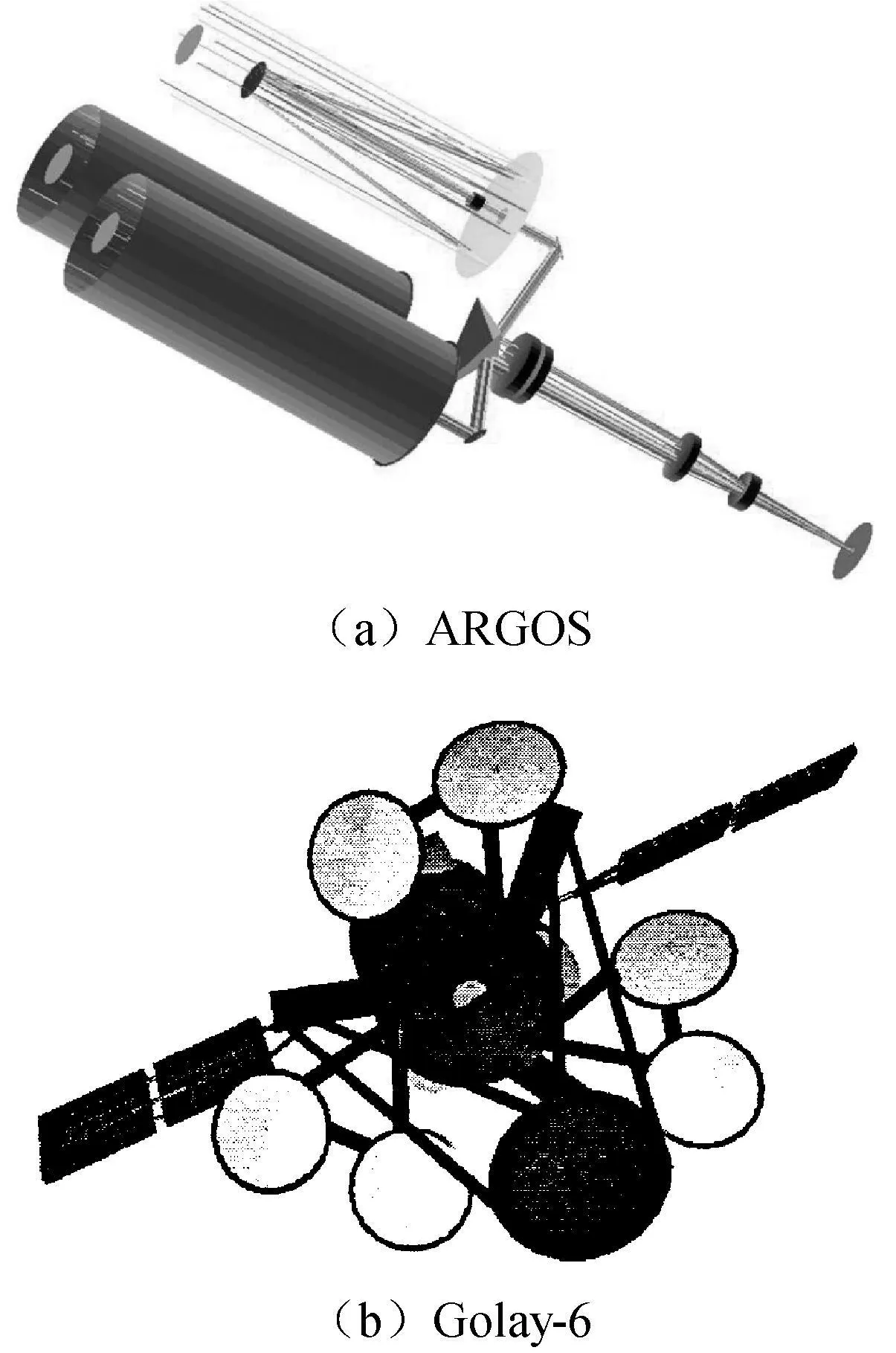
图5 国外使用的Golay构型Fig.5 Golay prototype used in abroad
光学合成孔径系统中至关重要的是多路光束的相位一致性[17]。各子孔径收集的光束在合成时,须符合需要的相位关系才能实现提高分辨率或中心视场消光。用于成像的合成过程,其轴向光程差一般要求控制在小于0.1λ,否则其点扩散函数会呈现中心强度明显降低、主瓣显著扩展而MTF中频出现零点等像质恶化的结果,从而失去了合成的价值。此处:λ为工作波长。该要求仅略高于系统自身热形变,同时对光束的倾斜误差要求达到亚角秒级[2]。空间探测应用的光学孔径合成过程因需要进行光谱学分析,要求达到纳米量级[11]。
从目前的空间技术水平来看,仅依靠航天器自身实现这些指标是非常困难的。因此,有文献提出采用光学的自适应技术对光路进行小范围高精度的闭环控制,以降低对航天器的相对位置和姿态的测控要求。一般是采用波前抽样传感器实时测量各子光束的相对波前误差,再通过微机构甚至推进系统进行闭环控制,实现波前的实时校正[2、17]。
1.2.3 图像恢复
与常规望远镜的成像结果不同,稀疏系统的图像一般无法直接使用,需进行恢复和/或增强处理。Golay-6计划的点扩散函数(PSF)和MTF如图6所示。由其MTF数据可知:在获得高分辨率的同时,图像整体存在对比度偏低、信噪比偏低和中低频近零点的状况[18]。这需要进行星上或地面的图像处理,以改善图像主观感受,提高对比度,实现高分辨率。据报道,目前采用的有维纳滤波或信号的反卷积等方法[17]。
2 工程化关键技术
空间稀疏孔径系统实现工程化的关键技术有:对卫星平台来说,可采用单颗大卫星平台的载荷展开或基于多颗卫星平台的编队,其中编队需先考虑轨道设计,其次是星间基线的测量与控制,最后需根据稀疏孔径系统的特点设计与之配套的光机系统。
2.1 载荷展开
为保证成像系统有较高的像质,需较高填充比的稀疏孔径系统,这就要求子镜面或子孔径的间距不能太大。根据卫星太阳帆板展开原理,美国的下一代太空望远镜NGST,JWST和可展开空间望远镜(DST)均采用了分块可展开的成像系统,国内也已开展了相关研究[19-20]。从其体积和质量来看,小卫星平台无法胜任。

图6 Golay-6的构型及其PSF,MTFFig.6 Golay-6 prototypeand its PSF and MTF
2.2 卫星编队
与上述展开技术不同,利用卫星的编队飞行实现的稀疏孔径系统具可变基线和灵活的空间构型[21]。该技术主要包括:根据任务需求,确定适当的稀疏孔径空间布局和基线参数;设计和优化编队卫星轨道;考虑在轨运行期间通过相关的精密测量与控制保证队形的捕获、维持和重构。有文献报道采用对接或绳系方式实现高精度的编队飞行。
2.2.1 编队卫星轨道设计
目前,实现近地轨道编队飞行的4种常用构型是串行编队、沿航向编队、空间圆编队和水平圆编队[22]。国外分布式卫星合成孔径雷达(SAR)的空间编队构型中,法国CNES的SAR干涉转轮(Cartwheel)任务采用了同轨道面椭圆编队方式,3颗相同的小卫星工作于近地轨道,每颗小卫星携带SAR接收装置,其编队整体靠近一主动雷达,两者距离约数十至千余米[23]。MOREIRA等提出了干涉钟摆(Pendulum)系统,采用沿航迹编队的方式[24-25]。美国TechSat21计划采用了空间圆构型等多种编队方式[26]。
实现稀疏孔径干涉成像,首先需建立一中心主星,以该中心主星为参考建立空间编队,主星同时接收、合成编队的子孔径卫星射来的观测光束。根据实现稀疏孔径干涉成像的光学要求,被观测目标至中心探测器的光程应相等,否则会因光束间的相位差过大而无法合成。
被观测目标到中心探测器的光程包括两个部分(如图7所示):被观测目标至子孔径编队卫星的光程H和子孔径编队卫星至中心主星的光程R(孔径基线),一般要求两者之和相等。通常,编队卫星在空间的位置和相位不断变化,空间构型的设计和控制是实现稀疏孔径干涉成像的难点。

图7 空间椭圆编队卫星的基线和光程Fig.7 Baselineand light path of satellites formation flying in spatial ellipse
2.2.2 空间基线测量与控制
对编队卫星的空间相对位置和方位(星间基线)的精密测量与控制是保证编队飞行实现的基础。目前进行编队卫星星间基线测量的方法有全球卫星定位系统(GPS)测量、无线电(微波)测量和光学(可见光、激光、红外)测量等[27-28]。
目前,激光测距的精度最高,可采用脉冲式和相位式。脉冲激光测距雷达的测距精度可达分米级,量程很大;连续波相位激光测距雷达的测量精度可达毫米级。此外,激光测角技术采用激光在四象限探测器成像的方法,精度可优于5″。但由于激光测量系统的视场较小,实际应用中需辅以无线电的引导[27-28]。
微波实现距离测量的原理与激光类似,同时采用比相法实现角度测量。限于波束的宽度,通常其精度低于激光,但量程更宽广。采用微波的优点是可同时实现星间的通信。
美国的TPF-I计划在队形建立和队形重构时,采用量程20~200 m甚至10 km、精度为米级的距离捕获探测器,采用4π立体角量程、1至数十度的方位捕获探测器;执行科学任务前需进行精密的位置测控,此时采用量程数十米、精度毫米级的距离精密探测器和量程10′、精度4″的方位精密探测器。此外还有用于量程衔接的中等精度传感系统,指标介于前述两者间[11、29]。对编队队形的控制要求通常会降低为测量要求的1/10~1/5。
2.3 光机技术
稀疏孔径的子孔径的光学系统技术要求与传统单孔径系统相当,因此可采用现有的成熟光学系统,但需在常规系统的基础上设计和加工准直光学系统与光束合成器等部件。
光束合成中,需根据自适应光学方法采用闭环控制方式对波前进行校正,以达到成像所需的相位精度。这需要精密的波前测量和补偿装置。哈特曼-夏克波前传感器是使用较多的一种探测装置,其主要原理是采用微透镜将入射波前分割成子孔径阵列,在高帧频电荷耦合器件(CCD)相机的像面上形成独立的哈特曼光斑,通过测量各光斑质心的偏移量就可求出阵列内入射波前的平均斜率[30]。系统的采样频率可达数千赫兹,测量动态范围可达数倍波长,精度可优于λ/20。相对星间位置因入轨初始条件和轨道摄动导致的不确定性来说,波前测量和控制的方法可有效弥补位置变动对光束合成的影响,实现稀疏孔径的合成功能。
3 结束语
本文对基于小卫星编队的稀疏孔径遥感技术进行了综述。实现斐索干涉所需的空间尺度远小于迈克尔逊干涉,子孔径的间距与其口径一般在同一量级,且可利用现有的子孔径,以降低成本和缩短任务周期。从空间尺度来看,采用单颗大卫星平台较小卫星编队更合适,或采用小卫星的对接、绳系等方式。迈克尔逊干涉通常面向长期静止的天文目标,通过长基线(数十米至数公里量级,为其子孔径口径的数十甚至数千倍)、长时间观测可获得极高的空间分辨率(毫角秒量级),更适合采用编队飞行实现。
[1]陈晓丽,傅丹鹰.大口径甚高分辨率空间光学遥感器技术途径探讨[J].航天返回与遥感,2003,24(4):19-24.
[2]CHUNG S J.Design,implementation and control of a sparse aperture imaging satellite[D].Boston:Massachusetts Institute of Technology,2002.
[3]钱 霖,吴泉英,吴 峰,等.复合三子镜的成像研究[J].光学学报,2005,25(8):1030-1034.
[4]韩 骥,王大勇,刘汉承,等.光学稀疏孔径成像复合孔径阵列结构研究[J].光电子激光,2007,18(6):649-652.
[5]吴泉英,钱 霖,沈为民.Golay-6稀疏孔径系统成像研究[J].仪器仪表学报,2006,27(增刊):1114-1115.
[6]PAULS T A.Origins of sparse aperture imaging[C]//IEEE Aerospace Conference.Big Sky:IEEE,2001:3,1421-1427.
[7]陈晓丽,沈洪兵,杨秉新,等.稀疏孔径成像系统发展概况[J].航天返回与遥感,2006,27(1):23-27.
[8]AVOORT C V D.A comparison of techniques for wide-field interferometric imaging[D].Delft,Holland:Technische Universiteit Delf t,2006.
[9]OLLIVIER M,MARIOTTI JM,LÉGER A,et al.Nulling interferometry for the DARWIN space mission[J].C R Acad Sci Paris,2001,t.2,Series IV:149-156.
[10]ESA.Darwin,science across disciplines:a proposal for the cosmic vision 2015-2025[OB/R].[2007-01-25].http://www.mpia.de/Darwin/CV2007.
[11]KALTENEGGER L.Search for extra-terrestrial planets:the darwin mission-target stars and array architectures[D].Graz,Austria:Karl Franzens University,2004.
[12]LAWSON P R,DOOLEY J A.Technology plan for the terrestrial planet finder interferometer[A].JPL Publication,2005.
[13]LENTILUCCI E J.Condor applications:Condor and physics-based target detection[A].Research Computing Informational Seminar Series,Invited Talk,Rochester Institute of Technology,2007:1-39.
[14]GOLAY M J E.Point arrays having compact nonredundant autocorrelations[J].Journal of the Optical Society of America,1971,61:272-273.
[15]DENOYER K,LEITNER J.Autonomous neural control for the UltraLITE phase I test article[C]//IEEE Arcrospace Conference.Snowmass at Aspen:IEEE,1998:2,127-132.
[16]LENA P,LEBRUN F,MIGNARD F.观测天文物理学[M].孙维新,胡景耀(译).台北:国立编译馆,2004.
[17]龙伟军,王治乐,周彦平.光学综合孔径望远镜成像分析及计算机仿真[J].光学学报,2004,24(8):1009-1014.
[18]MILLER N,DUNCAN B,DIERKING M P.Resolution enhanced sparse aperture imaging[C]//IEEE Aerospace Conference.Big Sky:IEEE,2006:1-16.
[19]SCHRADER K N,FETNER R H,GRIFFIN SF,et al.Development of a sparse-aperture testbed for optomechanical control of space-deployable structures[J].Proc of SPIE,2002,4849:384-395.
[20]刘志全,孙国鹏.空间光学遥感器的主镜展开机构[J].中国空间科学技术,2006,26(6):42-48.
[21]林来兴.卫星编队飞行的应用研究[J].卫星应用,2004,12(2):35-40.
[22]郗晓宁,王 威.近地航天器轨道基础[M].国防科技大学出版社,2003.
[23]VAISSIÈRE M J New projects in the offing[M].Cnes:Dossier by Brigitte Thomas,2004.
[24]黄卫东,张育林.分布式小卫星合成孔径雷达的空间编队构形研究[J].电波科学学报,2005,20(2):207-211.
[25]陈 杰,周荫清,李春升.分布式SAR小卫星编队轨道设计方法研究[J].中国科学E辑信息科学,2004,34(6):654-662.
[26]CHIEN S,SHERWOOD R,ZETOCHA P,et al.The Techsat-21 autonomous space science agent[C]//AAMAS'02,Sponsor by Association for Computing Machinery.Bologna,Italy:[s.n.],2002:1-9.
[27]陈谷仓,王元钦,王天祥.高精度星间基线测量方法探讨[J].飞行器测控学报,2005,24(4):60-65.
[28]刘 洋,易东云,王正明.分布式小卫星SAR的基线测量方法研究[J].飞行器测控学报,2006,25(1):26-30.
[29]LIM R S.Staged attitude-metrology pointing control and parametric integrated modeling for space-based optical systems[D].Boston:Massachusetts Institute of Technology,2006.
[30]饶长辉,张学军,姜文汉.基于哈特曼夏克波前探测的图像解卷积:室内结果[J].光学学报,2002,22(7):789-793.
猜你喜欢
激光技术(2024年1期)2024-04-03 12:09:02
军事文摘(2023年5期)2023-03-27 08:56:26
高技术通讯(2021年3期)2021-06-09 06:57:46
奥秘(2021年3期)2021-04-12 15:10:26
科学(2020年5期)2020-11-26 08:19:14
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
舰船电子对抗(2016年5期)2016-12-13 08:41:14
光学精密工程(2016年6期)2016-11-07 09:08:16
红领巾·探索(2014年1期)2015-03-16 16:35:14
海军航空大学学报(2015年4期)2015-02-27 13:45:56