微波成像仪扫描转动对卫星姿态的影响分析和控制实现
2011-09-18 02:32:34吕利清翁艺航史耀强
上海航天 2011年5期
吕利清,翁艺航,史耀强
(上海航天电子技术研究所,上海 201109)
0 引言
微波成像仪是一种具有固定视角的机械圆锥扫描全功率型微波辐射计,可在多个特定频率上接收来自地球表面和大气的水平及垂直两个极化的电磁辐射,进行数字化处理后通过卫星传输到地面形成伪彩色图像,并反演出降雨、云和大气中水汽含量、土壤湿度、海温、海冰、雪覆盖及海面油污等分布,对提高天气预报的准确性,特别是预报台风、暴雨等自然灾害,减少损失,保证航空、航海安全有重大作用。我国首次研制的微波成像仪是机电热一体的卫星有效载荷,系统功能复杂,转体质量大,高度大,扫描转动极易对卫星姿态稳定性产生干扰。为确保卫星姿态稳定性,研制时在地面必须对转体的稳定性和平衡性进行预先控制。但卫星入轨后,由于重力效应和风阻环境的变化,转体运动稳定性、干扰效应相对地面状态发生变化,对卫星的姿态控制产生干扰。这些干扰会影响卫星平台的姿态。因此,须按更复杂的空间动力学环境进行分析设计和控制,确保卫星姿态稳定度[1]。
本文介绍了微波成像仪扫描运动方式,分析了微波成像仪扫描运动对卫星姿态稳定性的影响,提出了微波成像仪扫描运动稳定性控制方法,给出了过程控制方法及在轨验证效果。
1 微波成像仪结构和扫描运动方式
微波成像仪由探测头部、冷空反射镜、配电单元、中央处理器、火工品控制器和扫描驱动控制器等组成。在卫星入轨发射时,微波成像仪处于收拢状态(如图1所示),固定安装于卫星头部,外包络满足火箭整流罩要求。卫星入轨后,微波成像仪天线展开机构展开,热反射镜抬升,扫描启动,进入在轨工作模式。微波成像仪的在轨展开工作状态如图2所示。
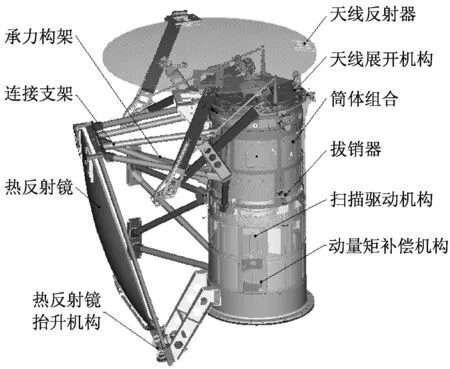
图1 微波成像仪收拢发射状态Fig.1 MWRI folded status for launch
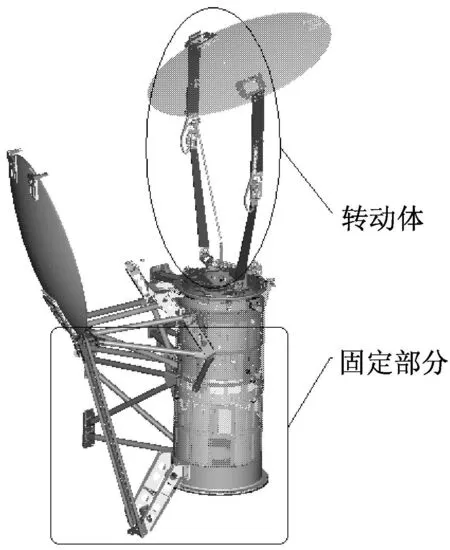
图2 微波成像仪展开工作状态Fig.2 MWRI deployed status in work
为实现天线波束对地圆锥扫描和极化信息观测,微波成像仪采用了电机驱动转动体扫描的运动方式。转动体安装有天线及展开机构、辐射测量通道、数据采编测量装置和工作电源等,转动体质量约60 kg。为补偿转动体旋转产生的动量矩,在微波成像仪的底部设计了补偿飞轮。另外,为满足卫星发射需要,微波成像仪设有天线展开机构和转动体锁紧装置。卫星入轨后,根据指令,天线展开、转动体解锁并与电机驱动轴相连,建立在轨工作状态[2]。
2 微波成像仪扫描运动对卫星姿态稳定性的影响
2.1 转动体质心偏移(静不平衡)
理想状态的转动体质心(设计目标)应在转动轴上。若转动体质心不在转动轴线上,则当其转动时,其偏心质量就会产生离心惯性力,从而在运动副中引起附加动压力,称为静不平衡。实际工程研制中,有多种原因会引起转动体质心偏离转轴。其中:一类为可控因素,包括电单机元器件质量分布不均的影响,零部件加工精度和转动体集成安装精度的影响等,该类影响可在转动体状态建立后,通过试验测量进行调整控制;另一类因素具随机性,包括天线展开到位精度、转动体解锁后轴系精度等,此类影响发生在卫星入轨后,引起转动质心偏离转轴,产生相对卫星的偏心力矩
式中:Ur为静不平衡量;m为转动体质量;r为转动体等效质心偏移即转动体质心偏离转轴的距离。
2.2 转动体动平衡(偶不平衡)
转动体质心调整到转动轴上时,其偏心合力为零。但由于各偏心质量在转动时所产生的离心惯性力不在同一回转平面内,所形成的惯性力偶仍使转动体处于不平衡状态。此种不平衡仅在转动体运动时才可显示,成为偶不平衡,即r=0,Jxz≠0,Jyz≠0,Jxz,Jyz为主矩(绕z轴的惯性积),偏心力产生的力偶矩同样会对卫星的姿态产生影响[3]。
转动体常为静偶混合不平衡,转动时偏心力合成为一个合力和一个力偶(力矩),即构成静不平衡量Ur和偶不平衡量Pr,它们产生的力矩不在同一轴向平面内,故需在2个或2个以上平面进行配平。
2.3 微波成像仪扫描运动不平衡对卫星姿态稳定性的影响
2.3.1 分析方法
微波成像仪安装于卫星平台上,如图3所示。
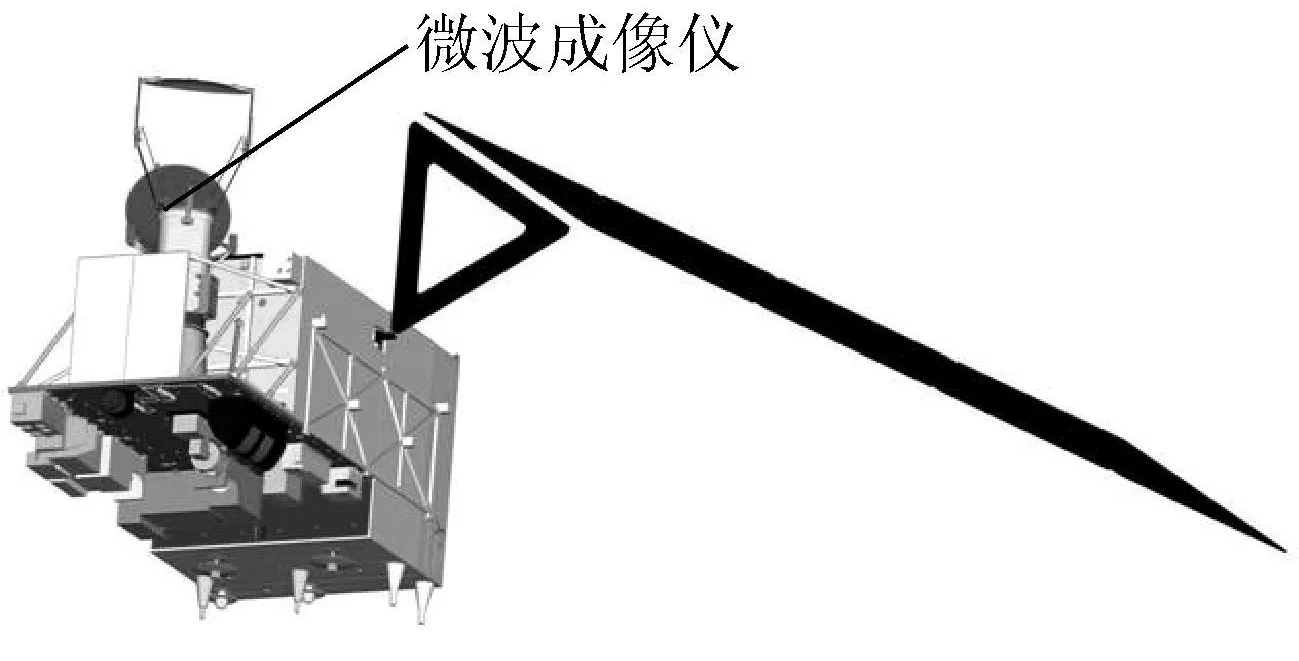
图3 微波成像仪及卫星平台Fig.3 MWRI and satellite
根据多体系统动力学理论,用ADAMS软件分析微波成像仪扫描运动不平衡对卫星姿态稳定性的影响。根据卫星在轨工作状态,模拟卫星工作环境。另外,将整个卫星视为多刚体系统,分为部件、约束和力三部分。在ADAMS软件中建模并添加合适的约束,输入卫星与微波成像仪的质量与惯量,将微波成像仪的运动作为卫星平台的载荷(激励)。ADAMS软件根据机械系统模型,自动建立系统的拉格朗日方程,对每个刚体,列出6个广义坐标带乘子的拉格朗日方程即相应的约束方程为

式中:qj为系统的广义坐标;Fj为广义坐标方向的广义力;Ψi为系统的约束方程;λi为m×1维的拉格朗日乘子列阵;i=1,2,…,m;K为动能,包括平动动能和转动动能,对本系统而言,只有微波成像仪转动形成的转动动能,
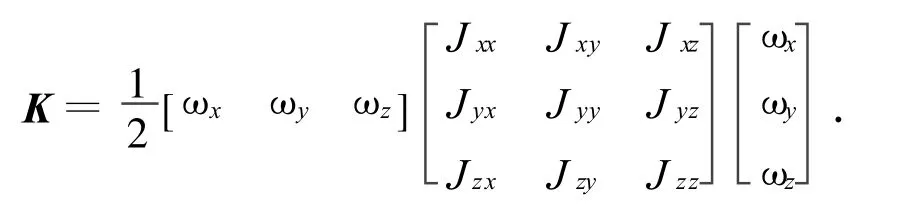
此处:ωx,ωy,ωz分别为微波成像仪绕x、y、z轴转动的角速度(其中ωx,ωy为0);Jxx,Jxy,Jyy,Jxz,Jyz,Jzz分别为微波成像仪转动部分绕x、y、z轴的转动惯量和惯性积。
ADAMS求解该动力学方程时采用变系数的向后微分公式(BDF)刚性积分程序,它属于自动变阶、变步长的预估校正法(PECE),积分的每步采用了修正的Newton-Raphson迭代算法[4]。
2.3.2 微波成像仪扫描不平衡控制要求(目标)确认
卫星总体根据姿态稳定度控制目标,提出了微波成像仪扫描残余不平衡控制要求:静、偶不平衡量分别不大于0.017 kg◦m,0.015 kg◦m2。用ADAMS软件进行仿真分析,在目标状态下微波成像仪扫描转动对卫星的干扰力矩为0.43 N◦m,卫星姿态角速度最大为0.001 5(°)/s。能满足卫星的姿态稳定度要求。
3 微波成像仪扫描平衡状态控制
根据控制目标,以及合微波成像仪结构特点和研制流程,设计了微波成像仪扫描平衡状态的控制流程为天线静平衡控制→天线展开精度控制→转动体动平衡控制→整机动平衡控制。
3.1 天线静平衡控制
天线是一个偏置抛物面,存在固有的质心偏移。天线安装在转动体的顶部,对转动不平衡影响较大,故对其实行静平衡控制。控制方法为:在静平衡机上测量天线的质心位置,通过在特定位置上的质量调配,将天线的质心偏移量调整到许可范围,减少天线对展开机构和转动体的影响,完成转动体最高平面的配平。
3.2 天线展开到位精度控制
天线展开动作发生在卫星入轨后,天线展开到位精度关系机构的角度位置,影响转动体动平衡状态。研制时须确保天线展开到位精度。天线展开到位精度由设计、制造和装调保证,天线展开到位精度控制确认方法为:微波成像仪总装完成后对天线进行多次展开到位后的形位精度测量,控制展开到位后的形位精度在许可范围内。
3.3 转动体动平衡控制
微波成像仪转动体动平衡控制在转动体总成状态确定后进行。控制方法为:在动平衡机上测量转动体动平衡状态,通过在特定位置上的质量调配,消除由加工误差和转动体集成过程偏差造成的动不平衡,将转动体静不平衡量、偶不平衡量调整到控制目标范围内。
3.4 整机动平衡状态控制
在完成转动体动平衡控制后,将转动体安装至微波成像仪整机,进行整机动平衡试验。试验控制方法为:将微波成像仪安装于动平衡机上,模拟在轨工作过程,展开天线,解锁转动体,启动扫描,测量扫描动平衡状态。需要时可进行调配,将整机静不平衡量和偶不平衡量控制在目标范围内[5]。
3.5 微波成像仪扫描平衡状态控制效果
经过上述控制流程,发射前的微波成像仪整机动平衡状态见表1。
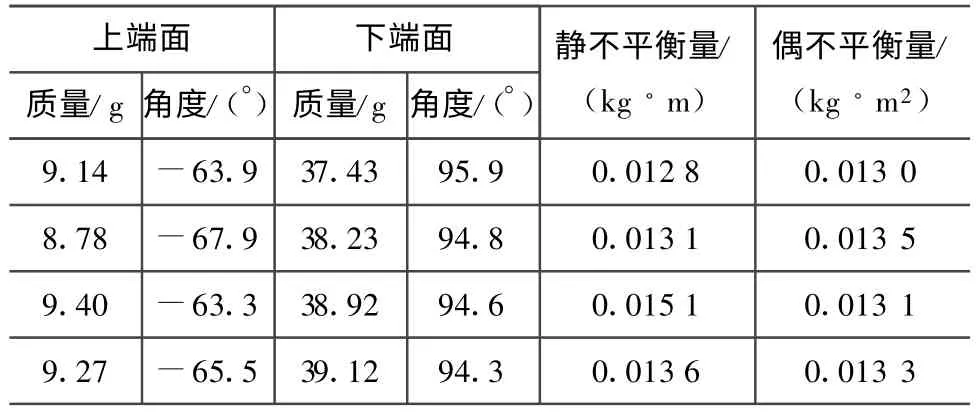
表1 微波成像仪整机动平衡状态(扫描周期1.7 s)Tab.1 Dynamic balance status of MWRI(scan period 1.7 s)
根据微波成像仪整机动平衡试验结果,用ADAMS软件分析了微波成像仪对整星的扰动力矩以及姿态控制的影响,结果为扫描转动对卫星的干扰力矩0.35 N◦m,卫星姿态角速度0.001 3(°)/s,满足整星姿态稳定度的要求。
4 在轨验证
卫星发射入轨,微波成像仪开机,卫星姿态稳定度测试结果见表2。由表可知:在各扫描模式下均满足姿态稳定度0.008(°)/s的控制目标。
另由表2可知:在轨测试数据与发射前的分析结果相符,但局部区域存在较大差异。分析后认为这是在特定区域微波成像仪的扫描频率与卫星太阳电池阵挠性耦合振动引起的,可通过提高太阳电池阵的固有频率避开微波成像仪的扫描频率。
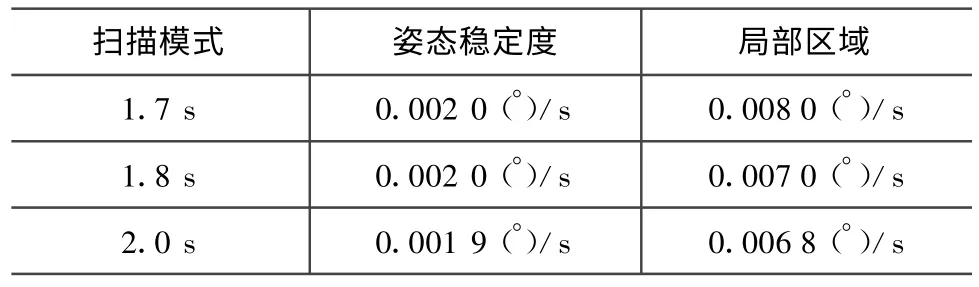
表2 卫星在轨姿态稳定度Tab.2 Satellite attitudestability on orbit
5 结束语
本文对微波成像仪扫描转动时对卫星姿态的影响进行了分析,并对其扫描平衡状态的控制进行了研究。在轨测试数据表明:微波成像仪动平衡控制有效,达到了预期的姿态稳定度控制要求。
[1]刘 蕊,王 平,吕振铎.星上运动部件对气象卫星姿态影响的研究[J].中国空间科学技术,2005,25(6):1-7.
[2]吕利清.星载微波成像仪的扫描问题[J].上海航天,1994,11(6):37-39.
[3]申永胜.机械原理教程[M].北京:清华大学出版社,2005.
[4]王国强,张进平,马若丁.虚拟样机技术及其在ADAMS上的实践[M].西安:西北工业大学出版社,2002.
[5]刘 军,廖明夫,翁艺航.微波成像仪低速动平衡[J].噪声与振动控制,2009,10(5):90-92.
猜你喜欢
一重技术(2021年5期)2022-01-18 05:42:12
宇航计测技术(2021年3期)2021-08-17 05:28:30
空间科学学报(2020年1期)2021-01-14 00:53:20
电测与仪表(2016年12期)2016-04-11 12:27:22
河北地质(2016年1期)2016-03-20 13:51:58
橡胶工业(2015年2期)2015-07-29 08:29:52
中国光学(2015年1期)2015-06-06 18:30:20
电测与仪表(2014年16期)2014-04-22 05:20:20
电测与仪表(2014年14期)2014-04-04 11:53:34
西北农林科技大学学报(自然科学版)(2014年9期)2014-03-26 07:36:40