
一种智能化的避台航线设计方法
2011-09-13 05:50汤青慧刘艳艳
中国海洋大学学报(自然科学版) 2011年6期
汤青慧,陈 戈,刘艳艳
(1.中国海洋大学信息科学与工程学院,山东青岛266100;2.青岛理工大学管理学院,山东青岛266520)
一种智能化的避台航线设计方法
汤青慧1,2,陈 戈1,刘艳艳1
(1.中国海洋大学信息科学与工程学院,山东青岛266100;2.青岛理工大学管理学院,山东青岛266520)
为提高船舶气象导航自动化水平,实现避台决策由经验型向智能型转变,提出1种高效、稳定的绕避台风航线规划算法。基于电子海图平台实现GPS、数字化气象信息的多源信息集成,直观显示船舶和台风当前位置和运动态势,基于栅格模型设计避台航线自动生成算法,实现避台航线在线实时规划。仿真结果表明,该方法能够根据气象信息及时重建环境模型并获取新的最优航线,算法对环境的复杂性不敏感,具有稳定性好、求解规模大、效率高的特点。
避台;航线规划;动态避障;气象导航
台风是威胁船舶安全航行的最严重灾害性天气之一,如何安全有效地绕避台风,是我国航海界的一项重要课题。为使海上强天气系统对船舶的影响降低到最低限度,往往要求船长具有比较全面系统的气象理论知识和丰富的海上经验,能够对接收到的气象信息进行全面系统的分析。由于过于依赖人工干预,使得船舶无法利用现有形式的气象信息对船舶进行智能的气象控制,船舶对气象信息的综合处理及分析能力无法提高,严重制约了气象信息在航海实践活动中运用的深度和广度。充分发挥电子海图(Electronic Chart and Display and Information System,ECDIS)综合显示的优势,将数字化气象信息、船舶运动信息与电子海图进行多源信息集成,提供更加丰富、直观、科学的气象决策依据,在此基础上,设计高效、稳定的船舶绕避台风算法,实现避台航线准确、智能、实时在线规划,对于提高气象导航自动化水平,保证人员、船舶安全具有非常重要的意义。
防避台风是1个复杂的决策过程,传统的解决办法是将台风中心的预报位置和本船的船位点标绘在《台风位置标示图》上,研究本船与台风的相对位置以及相互间动态的发展态势,然后用几何相对运动标绘的方法绘算出本船应采取的避台航向,常见的方法有扇形避台法、海图作业法、目标圆法等[1-3]。这些方法均以经验为主,给出的都是大致的行动方案,使得决策的及时性、科学性和准确性较差。近年来,出现了一些智能算法[4],为实现船舶避台智能化做出了积极的探讨。但是,在复杂环境下,该算法效率急剧下降,难以满足实时系统的要求。
随着航海自动化水平和数值天气预报精度的不断提高,选择较为精确的智能化避台方法已成为可能。本文主要研究基于电子海图平台的GPS(Global Position System,GPS)、数字化气象信息的多源信息集成,实现对船舶航线与台风路径的实时监控,设计高效、稳定的船舶绕避台风算法,形成船舶规避台风的智能控制方案,为船舶安全有效地绕避台风提供技术手段。
1 基于ECDIS的多源信息集成
如图1所示,地面上任意一点都是三维空间中的点,其位置由某种参照系统来确定,常见的地理坐标系采用椭球面定义地球上的位置,即任意一点的平面位置通过地理坐标经、纬度来描述。气象传真图中定位数据以及从GPS接收的本船位置数据均采用地理坐标,而电子海图最常用的是以WGS84坐标系为基准的墨卡托投影坐标。要想在同一坐标系上叠加显示就必须将坐标统一起来,把各点的地理坐标换算成绘制电子海图时的平面坐标,然后再与计算机屏幕上的像素点建立一一对应关系。
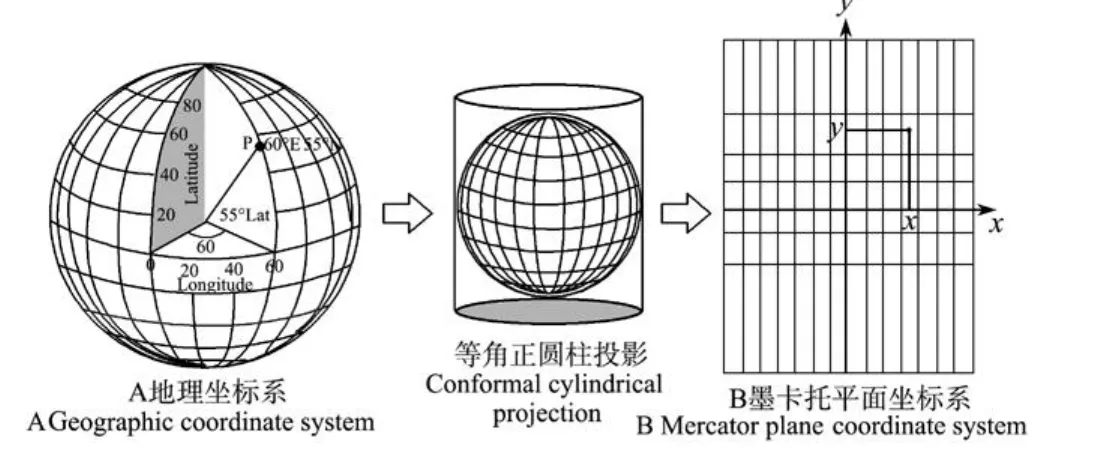
图1 墨卡托投影坐标变换Fig.1 Mercator projection transformation
(1)墨卡托投影坐标变换
椭球面上某点的地理坐标(λ,φ)到墨卡托平面直角坐标(x,y)的转化公式如下:

式中:
x,y—墨卡托直角坐标;
λ,φ—地理坐标系的经度和纬度;
q—等量纬度,

r0—投影常数,在切圆柱投影中r0=Rcosφ0,在割圆柱投影中r0=Rcosφ0;
R—基准纬度处椭球的卯酉圈曲率半径,
φ0—墨卡托投影的基准纬度;
λ0—中央经线的经度;
a—地球椭球长半径;
e—地球椭球第一偏心率。
(2)平面坐标到屏幕坐标变换
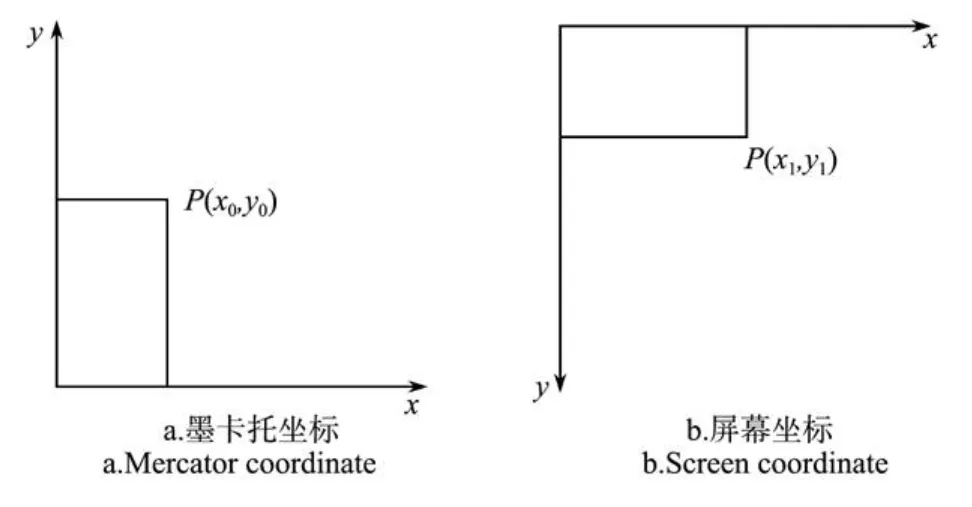
图2 墨卡托投影坐标到屏幕坐标变换Fig.2 Coordinate transformation from Mercator to screen
如图2所示,电子海图平面直角坐标的原点在左下角,横坐标向右递增,纵坐标向上递增;而Windows屏幕坐标的原点在左上角,横坐标向右递增,纵坐标向下递增。要在屏幕上显示多源集成信息,还需进行海图直角坐标向屏幕坐标的转换。设海图直角坐标为(x0,y0),横幅为W0,纵幅为H0;屏幕坐标为(x1,y1),横幅为W1,纵幅为H1,则有如下变换关系:
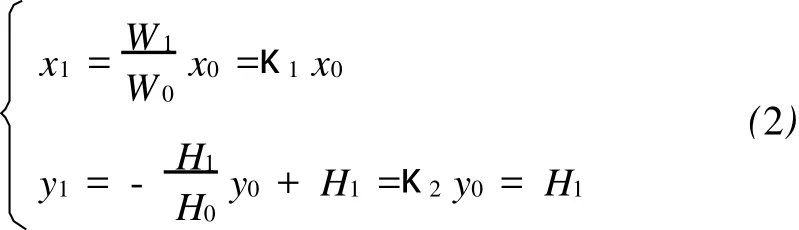
当2个坐标系的横幅和纵幅之比不一致时,k= min(κ1,κ2)
通过上述过程实现了电子海图、数字化气象信息和船位的完整结合,使用户可以直观地观测到船舶所在海域的气象信息,为避离台风提供更加丰富、直观、科学的气象决策依据。
2 避台决策模型
根据船舶计划航线和台风预报路径,判断当前和未来时刻的船-台相对位置,是决定船舶是否采取避离措施的重要基础。见图3,假设船舶的航向和速度分别为TCA和vA,速度矢量为vA,预报台风的移动方向和速度分别为TCB和vB,速度矢量为vB,预报起始时刻
t0船位于地理坐标A0(φA0,λA0)点,台风中心位于
B0(φB0,λB0)点,则任意时刻t,船位A(φA,λA)和台风中心位置B(φB,λB)点的坐标为:
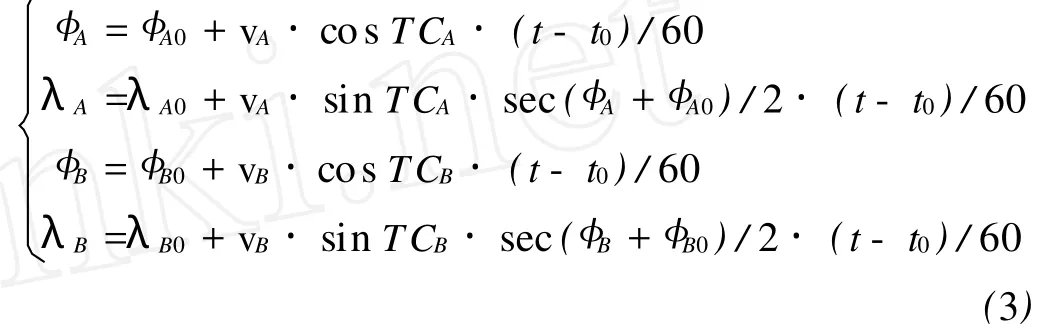
根据相对运动法则,利用速度三角形法[5]可求得台风的相对运动速度vR=vB-vA。图3中直线L为台风的相对运动线,过A0作相对运动线L的垂线,A0L0即为未来船-台最近遭遇距离DCPA。
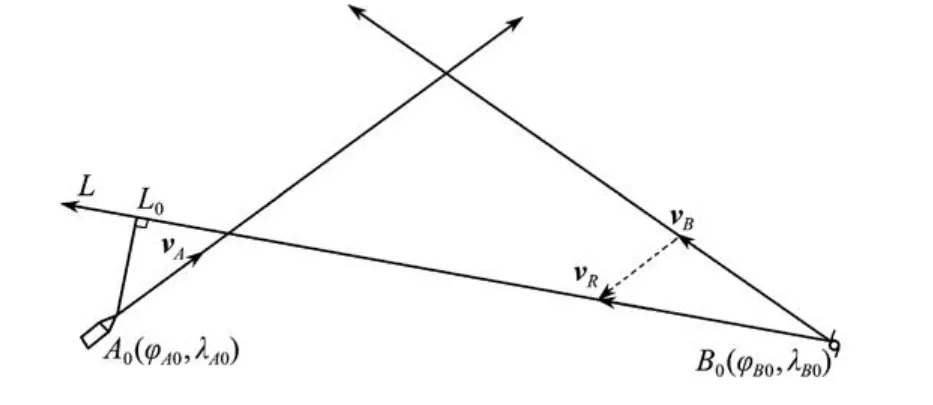
图3 船台综合态势图Fig.3 Ship-typhoon comprehensive trend
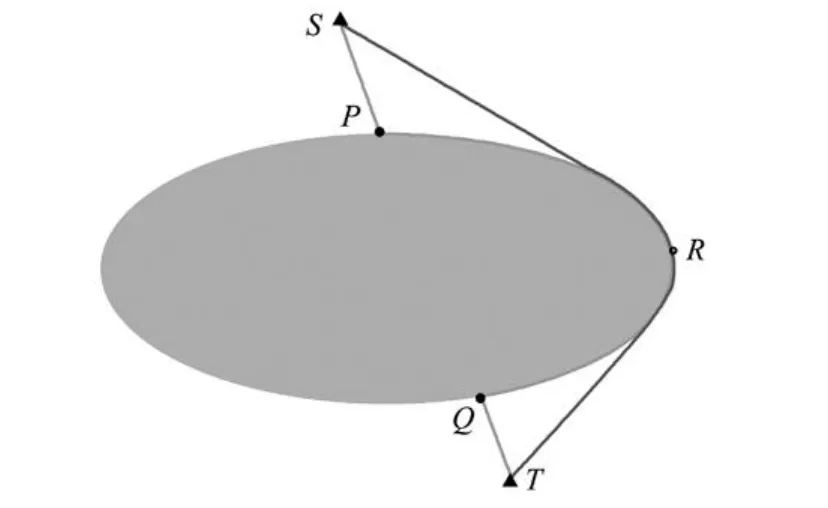
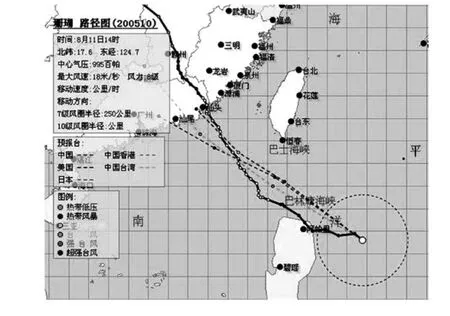
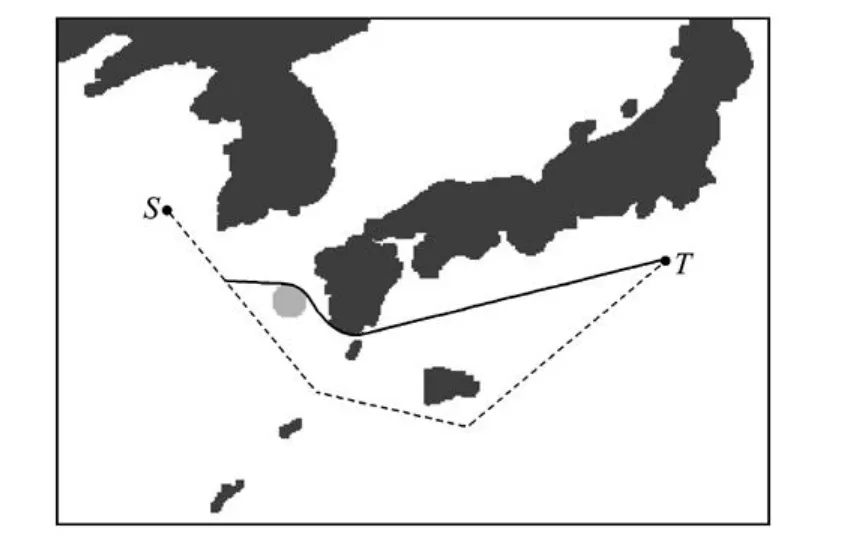
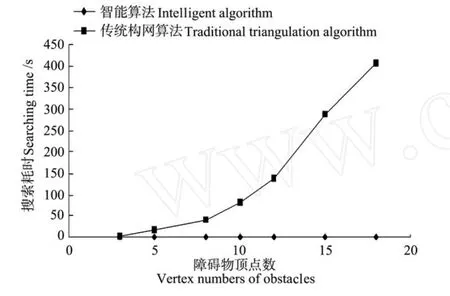
结合不同的船舶的船龄、船型、载货情况以及在大风浪中的失速情况,确定船舶与台风中心的安全距离Rsafe(一般取台风7级大风圈半径),当DCPA≥Rsafe时,船舶是安全的,可以保持原航线继续航行;若DCPA 3.1 构建环境模型 环境建模是实现物理空间到算法处理抽象空间的1个映射,本文采用栅格模型进行障碍物环境模型的构建,以规则矩阵栅格为组织形式,将规划海域进行二维离散化处理划分为m×n个正方形栅格。栅格阵左上角为坐标原点,水平向右为X轴递增方向,竖直向下为Y轴递增方向,每个网格作为1个像素或者像元Grid= (i,j,ATTR),其中,(i,j)代表栅格所处的行、列号,ATTR表示该栅格的属性信息。本文以颜色值作为栅格属性,ATTR[i][j]=白色,表示是自由栅格;A TTR [i][j]为彩色,表示为障碍栅格,不同的颜色值代表不同的障碍物。则避台问题可描述为:给定起始栅格和目标栅格,求从起始栅格出发,绕过障碍栅格,找到一条通往目标栅格的最短航线。 3.2 算法的基本思想 如图4所示,将给定的起点S和终点T连起来,得到探测线S T,用以探测航行途中是否有障碍物。如果S T与障碍物相离或者相切,则S、T之间可以直线航行,S T直线段就是最短的设计航线。如果S T与某个障碍物相交,船舶将试图从进入点P紧贴障碍物航行,直至到达Q点后继续沿着S T方向航行,如此生成一条局部避障航线S-P-R-Q-T。观察发现,从S可以直航至R,从R也可以直航至T,最短的设计航线应该是图中直切障碍物边界的航线S-R-T。这种形状,就像在S、T之间紧紧拉着一根橡皮筋,由于障碍物的存在,橡皮筋不能直穿障碍物而沿着障碍物边界拉伸,橡皮筋所具有的弹性使得航线趋于最短。 图4 算法基本思想示意图Fig.4 Basic thought of algorithm 3.3 算法步骤 定义1 对任意两栅格点GiGj,若由GiGj决定的线段所经过的任意栅格点都是自由栅格,则称GiGj是通透的。 定义2 如果节点N的临近单元中至少有1个单元为障碍单元,则称N为边界单元。 定义3 障碍物包围盒是由各障碍物的边界单元以循环链表的形式逐点存储而成的绕障包围圈。 图4中,探测线S T与障碍物包围盒的交点P和Q把障碍物包围盒分为2部分,任取其中一段如S-RT替换S T上P和Q之间的线段,可得到局部避障航线S-P-R-Q-T。接下来,将按照以下步骤对局部避障航线进行优化,得到1条最短的安全航线。 步骤1 读取离散化的局部避障航线的前2个节点,分别记作N1和N2,如果N2为终点,转步骤6; 步骤2 读取局部避障航线的下一节点,如果该点为终点,转步骤6;否则将该节点记作N3; 步骤3 判断N1、N2、N3是否共线,如果3点共线,删除N2节点,并把N3赋给N2,转步骤2; 步骤4 如果N1、N2、N3不共线,进一步判断N1和N3是否通透,若通透,将N2删除,并判断N1是否为起点S,如果N1是起点S,将N3赋给N2,转步骤2;否则,将N1赋给N2,将N1的前一栅格赋给N1,转步骤3; 步骤5 如果N1、N2、N3不共线,且N1和N3不通透,则将对应颜色值的障碍物包围盒上的边界点加入到局部避障航线的N1和N2之间,并将该边界点赋给N1,转步骤3; 步骤6 算法结束。 2005年8月11日06··00,在菲律宾以东洋面生成2005年第10号台风珊瑚,中央气象台预报此台风向西北方向移动,在未来72 h登陆我国广东沿海(见图5)。某轮从新加坡驶往新港,此时正位于南海中部。12日21··00(U TC),台风中心位置(20.3°N,119.1°E),移向315(°),移速6 kn,7级大风圈半径320 n mile。此时,本船船位(16.8°N,112.5°E),航向183(°),航速22 kn。船台距离为797.9 n mile,由于船台距离较远,不构成威胁,保持原航线继续航行。13日06··00(U TC),台风中心位置T(22.4°N,117.6°E),移向340(°),移速11 kn,7级大风圈半径350 n mile,此时,本船船位M (19.6°N,115.8°E),航向165(°),航速18 kn。船台距离为363.5 n mile,船舶处于风险区,利用本文提出的算法重新生成新航线,结果见图6。图中圆内区域为热带气旋7级以上大风区域,虚线为计划航线,实线为绕避台风的新航线,新航线可达到安全避离台风的目的。 图5 台风预报路径Fig.5 Forecast path of typhoon 图6 新生成的避台航线Fig.6 Route of typhoon avoidance 4.1 效率分析 图7 算法效率对比Fig.7 Comparision of Algorithm efficiency 为验证本文所提出算法的性能,将其与传统构网算法进行试验对比,结果见图7。由于充分利用了栅格模型像素间的邻接关系,本文提出的算法具有较高的搜索效率,图中搜索耗时均不超过1 s。同时,由于算法的执行效率主要取决于起点S到终点T的距离、S T途径障碍物的数目,而与其它的障碍物无关。因此,算法对环境的复杂度不敏感,稳定性好,在障碍物小而多的环境中优势更加明显。4.2适用性分析 当碍航物形状复杂时,通常的做法是用凸包围盒近似表示碍航物,极易造成搜索结果非优。本文提出的算法中,障碍物可以为任意形状,使算法更具一般性、通用性、适用性。当障碍物信息发生改变,能够根据更新的环境信息,重建环境模型,实现航行过程中航线调整和优化,满足在航船舶动态避台的实时性要求。 本文基于电子海图平台进行GPS和数字化气象信息的叠加显示,设计避台航线自动生成算法,实现了避台决策的智能化和自动化。系统能够直观、实时显示船舶和台风的位置和运动趋势,为用户提供更加完备、直观、科学的气象决策依据,大大提高了避台决策的速度、精度和安全性。算法具有稳定性好、效率高的特点。后续研究将综合考虑流、浪、潮等多种气象因素的影响,使得规划的航线更加经济实用。 [1] 武心安.基于ActiveX组件技术的船舶绕避台风系统设计与实现[D].哈尔滨:哈尔滨工程大学,2007. [2] 陈宏权,黄立文,邓健.在航船舶基于气象分析的实用避台方法[J].武汉理工大学学报:交通科学与工程版,2005,29(3):436-439. [3] 王辉,卜仁祥.基于台风预报精度的避台方法[J].大连海事大学学报,2000,26(4):43-46. [4] 王敬全,贺跃箭,施平安,等.舰艇海上机动避台系统的应用研究[J].计算机仿真,2003,20(2):5-9. [5] 夏一麟.船舶相对运动[M].北京:人民交通出版社,1984. [6] 张英俊.电子海图数学与算法基础[M].大连:大连海事大学出版社,2001:15-18. Abstract: To improve the automatic level of marine meteorological navigation and realize typhoon avoidance from experience to intelligence,an efficient and stable algorithm is designed based on the grid model. The movement information of typhoon and ships are superpositioned on the electronic chart display platform.Simulation results show that the method can realize real-time route planning and obtain new optimal routes according to the environmental model reconstructed by the meteorological information,which is non-sensitive to the environment complexity and has characteristics of stability,large-scale computation and high performance. Key words: typhoon avoidance;route planning;dynamic obstacle avoidance;meteorological navigation 责任编辑 陈呈超 An Intelligent Method for Route Planning of Typhoon Avoidance TANG Qing-Hui1,2,CHEN Ge1,LIU Yan-Yan1 P231 A 1672-5174(2011)06-104-05 青岛市市南区科技发展基金项目(2010407XX)“虚拟帆船运动仿真系统开发”资助 2010-09-18; 2011-02-28 汤青慧(1978-),女,讲师。E-mail:seaytangqh@163.com3 算法介绍
4 仿真实验与分析
5 结语
(1.Institute of Information Science and Engineering,Ocean University of China,Qingdao 266100,China;2.Institute of Management,Qingdao Technological University,Qingdao 266520,China)
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
航海(2020年4期)2020-08-17
中北大学学报(自然科学版)(2020年4期)2020-07-13
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
少林与太极(2018年9期)2018-09-28
孙子研究(2016年4期)2016-10-20
航海(2016年5期)2016-10-11
弹箭与制导学报(2015年1期)2015-03-11
