低噪声工况下潜艇自动舵控制策略研究
2011-08-20 08:40黄利华王长杰刘志宏
舰船科学技术 2011年8期
黄利华,于 俊,王长杰,刘志宏
(1.武汉第二船舶设计研究所,湖北 武汉 430064;2.华中科技大学,湖北 武汉 430074)
0 引言
潜艇的操舵系统通常都是按全速航行满舵工况设计的,在潜艇操舵过程中,打舵速度基本都是处于“饱和控制”状态,除打舵到位时,都处于最大打舵速度状态。在该状态下,一方面潜艇具有最大的操纵性能,另一方面操舵产生最大的水动力辐射噪声和冲击振动辐射噪声,其打舵速度和打舵加速度缺乏某种合理有效的规划。低噪声工况下潜艇自动舵控制策略研究即要研究合适的打舵规律,有效规划舵板的打舵速度及舵角,适当降低舵机性能,使得操舵过程中,既能保证满足潜艇的操纵性需要,又能较大地降低操舵辐射噪声。
1 研究背景
潜艇的主要机动任务是垂直面的深度机动和水平面内的航向机动。因此,潜艇操舵控制系统一般涉及深度和航向的控制。
潜艇操纵自动化的广泛研究从20世纪50年代开始,1959年在“乔治·华盛顿”级(SSBN598)核潜艇上装备的“潜艇航向和深度自动保持系统”可以同时或分别自动保持航向和深度,但变深和变向则需人工控制,它是美国潜艇自动控制系统的第一代。1961年,K.J.Kenberg等用经典的比例-积分-微分(PID)控制理论对108级潜艇的自动舵进行了系统研究[1],包括航向、深度控制、横摇校正、侧洗流补偿、纵倾限制和横倾限制等许多方面,具有重要参考价值。早期的PID控制方法的缺点在于PID控制参数随环境变量变化的整定优化是比较麻烦,随机性较大,不易确定。
2 潜艇空间运动仿真模型
潜艇的水下运动是空间六自由度运动[2],在水下航行时,潜艇主要依靠操纵首、尾升降舵和方向舵来保持和改变深度及航向。人们对操纵性的直观理解是基于艇员如何利用潜艇上的仪表、指令系统和操舵系统来控制好潜艇在水中的航行姿态。但对于工程人员来说,如果要对潜艇操纵性进行仿真研究和控制部件的设计,就需要将操纵性抽象出来加以应用,也就是要使用潜艇空间运动的数学模型。
1967年,美国海军舰船研究和发展中心(DTNSRDC)的Gertler和Hagen发表了潜艇空间标准运动方程[3]。这个方程是建立在大量船模试验(拘束船模和自由航模)和试验结果的基础上,该标准方程是带有官方性质机构发布的,具有很高的权威性,被世界各国广泛采用。1979年,Feldman对潜艇在高速、大舵角回转过程中潜艇上的水动力特性分析后给出了改进方程[4]。该方程主要考虑了横向流阻力、运动过程中水动力产生的历程效应(记忆效应),以及指挥台围壳下泄涡在尾附体上诱导产生的横滚和有艇体的掩蔽作用在尾升降舵和方向舵上产生的局部升力。因此该方程在水动力的表达形式上作了较大的改变。
本文中所采用的潜艇空间机动数学模型以Feldman改进方程为基础,以Fortran程序进行编译,以文本的形式设置输入输出,并形成可执行程序。
3 低噪声自动舵控制模型设计
在潜艇的操纵控制中,常规的自动舵算法繁琐,物理实现成本高,参数调整难度大。一般的模糊控制自动舵是一种基于模糊规则的控制系统,由于受控制过程的非线性、时变性及随机干扰等因素的影响,造成模糊控制规则不适合和不完整,影响控制效果。目前我国绝大多数船舶上装备的均是PID自动舵。传统的PID自动舵具有算法简单、鲁棒性好,可靠性高、稳态误差小等优点,所以至今仍有较强的生命力。但它也存在固有不足。本文将针对传统PID自动舵的局限性,以降低舵噪和提高控制效率为目的展开研究,并给出较优控制策略模型。
3.1 传统PID控制存在的问题及改进策略
传统PID存在固有局限性,其在设计中使用的性能准则不是最佳,多以追求某方面的指标进行设计。例如,对航向保持而言,目前通用的PID自动舵是单纯追求航向精度,是以损耗舵机能源和降低船速为代价的,因而不能实现经济航行,同时损害了潜艇隐身性能,舵角过大会产生较大的水动力噪声,操舵频繁导致液压系统的反复起停,导致较大的机械噪声。
为了达到低噪声操舵的目的,将操舵噪声指标作为目标函数的约束条件。由于操舵系统的机械噪声主要体现在转舵速率,水动力噪声主要体现在舵角的幅值,因此将转舵速率、舵角幅值的大小作为约束条件,利用遗传算法进行多目标寻优,针对某种潜艇动态特性(即某一固定航速)以及某种海况(即某种特性的干扰力),以定深(或定向)、变深(或变向)为目标进行寻优,找到对应的综合最优PID控制参数。
3.2 自动舵控制器总体结构
潜艇操纵运动大体分为三大类。第一类,转向机动或航向保持;第二类,变深机动航行或深度保持;第三类,转向过程中变深或变深过程中转向。第三类其实是第一类运动和第二类运动的综合。选择指令的航向角、深度、纵倾角作为系统的给定输入,每个通道有1个自适应PID控制器,分别对应潜艇的3个舵面操纵量方向舵舵角、首舵舵角、尾舵舵角。
对于第一类动作给出指定航向角,给定航向角与实际航向角之间形成误差信号,通过比例因子变换为PID控制器的输入。PID控制器经过1个PID环节变为潜艇方向舵的指令舵角,指令舵角经过实物舵机或数字仿真舵机,输出方向舵的实际舵角,然后经过潜艇六自由度空间运动仿真获得新的实际航向角,新航向角继续与指定航向角进行比对形成闭环回路。
对于第二类动作给出深度指令,给定深度与实际深度之间形成误差信号,通过比例因子变换为PID控制器的输入,经过PID自适应环节变为潜艇的首舵舵角指令,经过舵机转换成实际舵角,首舵舵角通过潜艇六自由度运动仿真后得到新的实际深度及纵倾角,其中纵倾角通过比例因子的第3个PID控制器(即尾舵控制器)的输入,经过自适应PID环节后得到尾舵的指令舵角,经过舵机转换为实际舵角,尾舵舵角用来控制纵倾,使其不至于过大而使潜艇失去控制。整个控制方案构成的系统控制方框图如图1所示。
3.3 控制参数优化
PID控制器要取得较好的控制效果,就必须调整比例、积分和微分3种控制作用,形成控制量中既相互配合又相互制约的关系,这种关系不一定是简单的线性组合,必须从这些变化无穷的组合关系中,根据目标值寻找最优关系。

图1 自动舵控制系统方框图Fig.1 The diagram of autopilot control system
PID控制在工业过程控制中至今仍然得到广泛应用。其参数调整大多数采用人工经验指导下的试验试凑方法,如典型的Ziegler-Nichols方法[5]。目前出现了一些基于遗传算法[6]、粒子群[7]和模糊推理等整定方法。PID参数选择,需综合考虑控制系统的稳定性、快速性以及准确性三者之间的制约关系,因此整定过程可以看成是一个多目标优化[8]问题。
把系统超调量、稳定时间为目标函数,采用改进非劣分层多目标遗传算法求出最优解。由这些最优解构成决策矩阵,使用客观赋权的信息熵法求出了属性的权重,然后采用逼近理想解的排序方法对最优解给出排序。
在某一固定的航速和某一转舵速率下,设定的工况为转首,即航向从0°转向至某一航向角,以最小航向超调量、最短到达指令航向时间为目标,对PID控制参数进行优化,得到给定工况下的一组最优解集,然后根据最小超调量和稳定时间综合选取一个最优PID控制参数。依次类推得到在不同舵速下对应(即最大转舵速率的20%,30%…100%)的最优P,I,D控制参数,优化流程图如图2所示。
4 仿真试验及结果
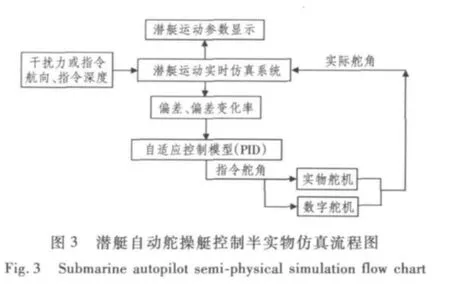
潜艇运动实时仿真系统和舵机实物试验系统,组建成半实物[9]的联合实时仿真系统,来开展此项目的半实物仿真试验研究,其目的是测试和验证操舵系统的控制策略是否能在有效的控制潜艇的深度及航向精度的前提下达到减振降噪的要求。本文主要以定深转向机动为例进行试验说明。半实物仿真试验流程图如图3所示。

定深转向机动试验主要是不同航速下以不同的舵速进行航向偏转的仿真试验,舵速分为最大转舵速率的 20%,30%,40%,50%,60%,70%,80%,90%和100%。本项试验所有典型试验工况和试验结果如表1所示。

表1 定深转向机动试验工况和结果Tab.1 Experimental conditions and results
由表1试验结果分析,最大转舵速率值由100%降低至20%,进行转向机动,其超调量均小于标准要求的机动范围10%的要求,机动时间仅比最大转舵速率100%时的机动时间多出10 s,同时舵机系统的振动噪声最多可降低约5 dB。
本文以60%的最大转舵速率进行定深转向机动为例和传统PID的控制结果进行比较,其结果曲线图见图4(ψ:航向角;δ:方向舵舵角)。

图4 航向控制及舵角变化曲线Fig.4 Heading control and rudder angle curve
从图4可以看出,在舵速和舵角幅值等约束条件下,运用多目标遗传算法优化后得到的自动舵控制模型,通过降低转舵速率和舵角幅值,降低了舵机的损耗以及舵机的机械噪声和水动力噪声,同时保持了对航向的良好控制,对航向控制的平稳性、超调量均优于传统PID自动舵。
5 结语
本文通过约束舵机系统的转舵速率和舵角幅值,运用优化算法,对控制参数进行优化,以达到同时满足降低舵机振动噪声、水动力噪声和潜艇自动控制性能的目的。半实物仿真试验表明,采用低噪声工况操舵控制策略后,可在满足潜艇机动性和稳定性的要求下,显著降低舵机系统的辐射噪声,具有较高的工程实际应用价值。
[1]申冬慧.基于模糊控制与GA的潜艇自动舵的设计与实现[D].哈尔滨工程大学,2003.SHEN Dong-hui.The design and implementation of an submarine autopilot based on fuzzy control and GA[D].Harbin Engineering University,2003.
[2]施生达.潜艇操纵性[M].北京:国防工业出版社,1995.
[3]GERTLER M,HAGEN R.Standard equations of motion for submarine simulation[R].AD 653861,1967.
[4]FELDMAN J,DTNSRDC revised standard submarine equations of motion[R].AD A 071804,1979.
[5]闫秀英,任庆昌,孟庆龙.一种自校正PID控制器设计与仿真研究[J].系统仿真学报,2006,(S2):753-756.YAN Xiu-ying,Ren Qing-chang,MENG Qing-long.Design and simulation for self-tuning PID controller[J].Journal of System Simulation,2006,(S2)753 -756.
[6]占自才.基于遗传算法的PID智能控制器设计[J].华东交通大学学报,2009,(1):58 -61.ZHAN Zi-cai.Design of intelligent PID controller based on genetic algorithm[J].Journal of East China Jiaotong University,2009,(1):58 -61.
[7]王介生,王金城,王伟.基于粒子群算法的PID控制器参数自整定[J].控制与决策,2005,(1):73 -76,81.WANG Jie-sheng,WANG Jing-cheng,WANG Wei.Self-tuning of PID parameters based on particle swarm optimization[J].Control and Decision,2005,(1):73 -76,81.
[8]张兴华,朱筱蓉.基于改进遗传算法的PID调节器多目标优化设计[J].计算机工程与应用,2006,(28):208-210.ZHANG Xing-hua, ZHU Xiao-rong. Multi-objective optimization design of PID regulators based on improved genetic algorithms[J].Computer Engineering and Applications,2006,(28):208 -210.
[9]陈爱玲.船舶航向控制器半实物仿真[J].船电技术,2009,(1):45 -48.CHEN Ai-ling.Hardware-in-the-loop simulation of ship course keeping controller[J].Marine Electric & Electronic Engineering,2009,(1):45-48.
猜你喜欢
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
舰船电子工程(2020年4期)2020-06-19
电子制作(2018年1期)2018-04-04
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
航空模型(2016年5期)2016-07-25
航空模型(2015年6期)2015-10-21
中国水运(2015年2期)2015-04-23