
一种快速重复控制策略在APF中的实现和分析
2011-08-08 14:13宫金武查晓明陈佰锋
电工技术学报 2011年10期
宫金武 查晓明 陈佰锋
(武汉大学电气工程学院 武汉 430072)
1 引言
当今电力系统中,非线性负载日益增多,有源电力滤波器(APF)已经被证明是一种有效的补偿谐波电流的装置[1-2]。如何实现既快速又准确的电流控制器是APF需要解决的一个大问题。目前常用的控制器有如下几种:
简单的比例-积分(PI)控制器具有比较快的跟踪速度,也易于实现,但是它存在很严重的弱点:在三相交流系统中,它在静止坐标系下的稳态误差较大,而且需要解耦[3]。理论上,任意次谐波均可以经过旋转坐标变换后转换为直流分量,从而使用PI控制器达到无差控制。但是每次谐波均需要一个旋转坐标变换和一个PI控制器,数字控制器实现起来很复杂。
谐振控制(PR)易于数字控制器实现,而且可以在静止坐标系下达到类似于 PI控制在同步旋转坐标下的频率响应特性[4-5]。谐振控制的传递函数通常表示为

PR控制器的框图和伯德图如图1所示。

图1 PR控制的框图和伯德图Fig.1 Block diagram and Bode plots of PR controller
由图1b可见,PR控制对特定频率的交流信号可以实现无静差跟踪,这是因为谐振环节可以看作一个交流积分器[6]。但是每个频率的交流信号均需要单独的 PR控制器,用现有的数字控制器实现一系列的PR控制器是比较复杂的工作[7-8]。
为了克服PI控制和PR控制的不足,基于内模原理的重复控制(RE)在风力发电、太阳能发电、不间断电源(UPS)、动态电压恢复器(DVR)、有源电力滤波器(APF)等场合取得广泛的应用[9]。重复控制的传递函数一般表述为
式中,Kr表示直接反馈控制的增益系数;Ks表示重复控制的增益系数。在APF控制器中应用重复控制可以加入前馈环节或反馈环节,这样具有良好的鲁棒性和自稳定性[10]。
图2a和图2b分别表示重复控制的框图和伯德图,图 2b表示重复控制对各次谐波都有无穷大增益,这表明重复控制可以消除各次谐波。但是重复控制具有一个工频周期的延时,因而影响到控制系统的动态响应速度。


图2 重复控制器的的框图和伯德图Fig.2 Block diagram and Bode plots of repetitive controller
在APF系统中,为了解决PI控制、PR控制、传统的重复控制的缺点,本文提出了一种新的控制策略,它易于数字控制器实现,可以消除所有奇次谐波,不仅具有谐振控制的特性,相比传统重复控制,也具有更快的响应速度和更小的静态误差。
2 控制策略分析
2.1 本文提出的控制策略
本文提出的控制策略的传递函数如下。

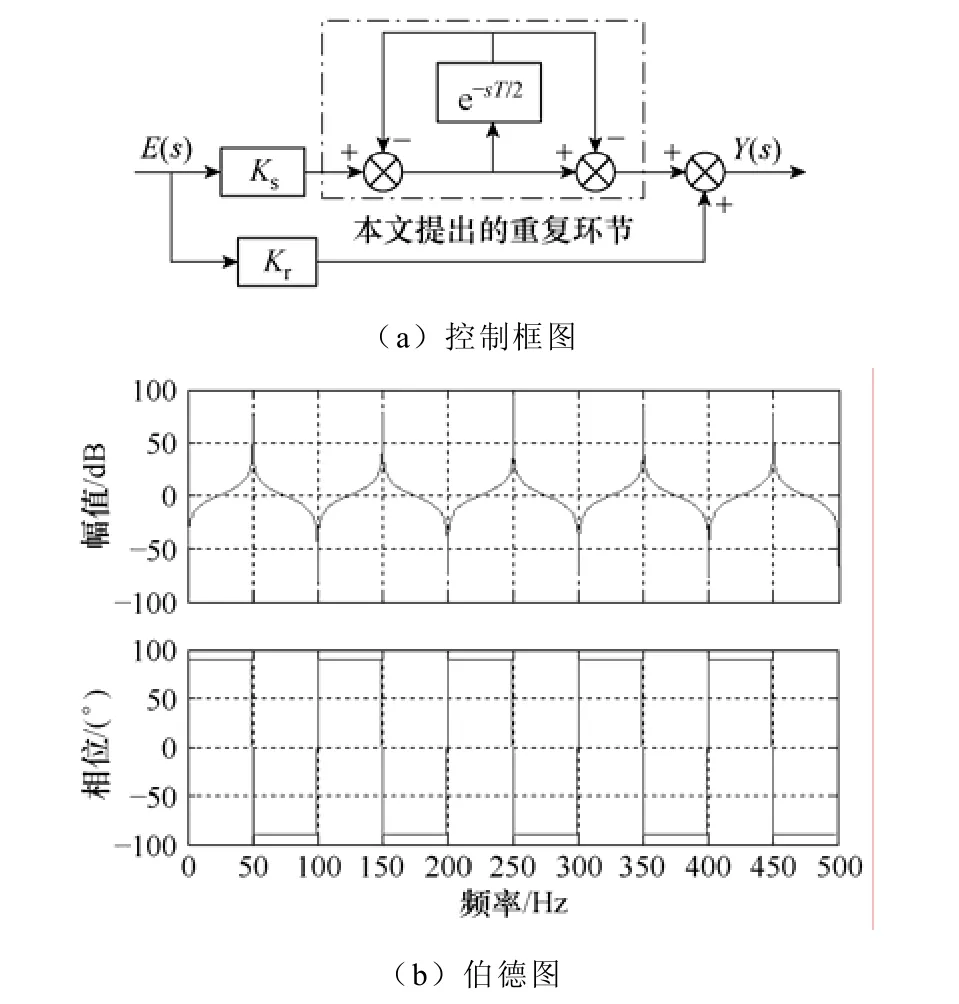
图3 本文提出的快速重复控制的框图和伯德图Fig.3 Block diagram and Bode plots of proposed controller
显然,式(3)类似于一系列奇次谐波谐振控制器的和。本文所提出的控制策略的框图和伯德图如图 3所示,在 (2 k±1)×50Hz,k=1,2,3…处,它具有无穷大增益,这就可以用来消除电力系统中所有的奇次谐波,符合多数实际系统的要求。对偶次谐波,本文所提出的控制策略没有补偿效果,但是不会引起偶次谐波放大。如图3a所示,这种控制策略只需要一个延时环节,很容易由DSP+FPGA构成的数字控制器实现[11-12]。
2.2 收敛性分析
为了分析本文提出的控制策略的动态特性和稳态误差,本文将典型的APF系统表述成图4所示的形式[13]。谐波电流信号ish取自电网侧,重复控制器据此产生参考信号,用来控制逆变器输出合适的谐波电流iAF,以完全补偿负荷产生的谐波电流。图5是本文所提出的控制策略的闭环控制框图。

图4 APF的系统框图Fig.4 Block diagram of APF configuration system
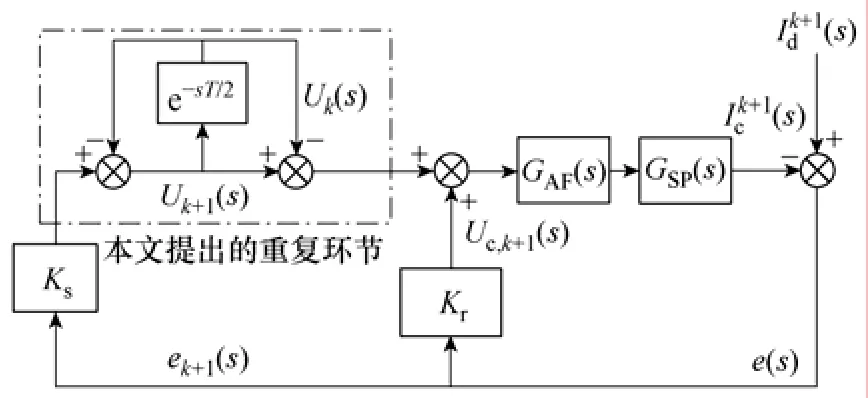
图5 本文提出的APF闭环控制框图Fig.5 Block diagram of the APF closed-loop control system
图5中,Id(s) 和 e(s) 分别表示负荷侧谐波电流和系统侧谐波电流,GAF(s) 表示PWM逆变器和谐波检测环节的二阶低通滤波器的传递函数,GSP(s)表示逆变器输出滤波器的传递函数,Kr和Ks分别代表直接反馈环节的增益和重复环节的增益。
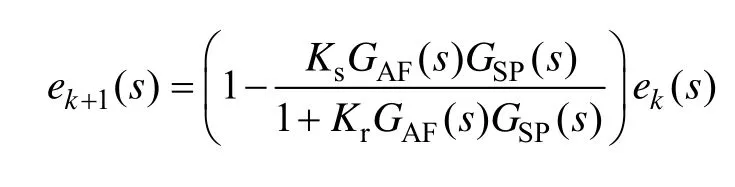
重复控制可以消除所有由周期性扰动 e(t) 引起的周期性误差。当周期性误差产生时,重复控制会跟踪实时误差,并且在下一个重复周期里将其补偿掉。所以对重复环节而言,动态响应时间是基于重复周期 T/2,(T为基波周期,T=0.02s)。本文的收敛性分析将在离散域进行,基于重复周期T/2。k代表重复周期数,k=1,2,3… 分别代表 0.5 T,T,1.5 T…。对重复控制的收敛性分析如式(4)~式(6)所示。

定义 GconF(s) 为收敛表达式,它表示控制量在两个连续重复周期的误差,即

在动态过程中,也可以用式(9)来分析误差的收敛性。只有满足

条件时,控制系统才是稳定的。也就是说,当收敛表达式的值小于 1时,误差将会收敛到零,并且GconF(s) 越小,误差收敛的速度越快。
由式(7)可见,误差函数的的第二部分是由Id(s) 决定的。在闭环控制系统中,由 Id(s) 引起的误差的传递函数可以表述为

式(12)表明,稳态误差是由GAF(s)、GSP(s) 和Ks+Kr的值决定的。
3 本文提出的控制策略和传统重复控制的对比
为了对比本文所提出的快速重复控制和传统重复控制,特将传统重复控制的框图表述为图6的形式。

图6 传统的重复控制系统框图Fig.6 Block diagram of traditional repetitive control system
图6中各个部分的含义和图5类似,也是在离散域内进行分析,基于重复周期T(基波周期0.02s),k代表重复周期数,k=1,2,3 … 分别代表 T,2 T,3 T…。与前面不同的是:重复周期不再是0.5 T而是T。重复控制的过程可以描述如式(13)~式(15)所示。

当控制系统达到稳定后,稳态误差是一个不变的量,它可以表示为。综合式(13)和式(16),可以推导出

同样,在传统重复控制中,也可以定义GconT(s)作为收敛表达式。该式表现了控制量在两个连续重复周期间的误差关系:

由式(17)可见,误差函数的的第二部分是由Id(s) 决定的。在闭环控制系统中,由 Id(s) 引起的误差的传递函数可以表述为

式(19)表明,稳态误差仅由Kr的值决定。对比误差传递函数式(12)和式(19)可见:本文提出的快速重复控制比传统重复控制具有更小的稳态误差。
重复控制的收敛速度取决于两个条件:重复周期和收敛性函数。
从重复周期上看,本文提出的快速重复控制的重复周期只有0.5 T,是传统重复控制的一半。所以它具有更好的动态响应时间。
对比本文提出的快速重复控制和传统重复控制的收敛性函数GconF(s)和GconT(s)可得

式(20)表明:本文提出的快速重复控制不仅具有更小的重复周期,还具有更小的收敛性函数,所以具有更好的动态响应性能。
4 重复控制的实现过程
传统重复环节的框图如图7a所示,传递函数为
式中,ω0=2πf0=2π/T,f0=50Hz,T=0.02s。当 esT=1(ω=±kω0,k=0,1,2…)时可以求出重复环节的极点,极点的位置如图7c所示。
本文提出的快速重复控制的框图如图7b所示,对应的传递函数为

根据式(22),当e−sT/2=−1(ω=±(2k+1)ω,0k=0,1,2…)时可以求出极点,当e−sT/2=1(ω=±2kω0,k=0,1,2…) 时可以求出零点。零极点的分布如图7d所示。
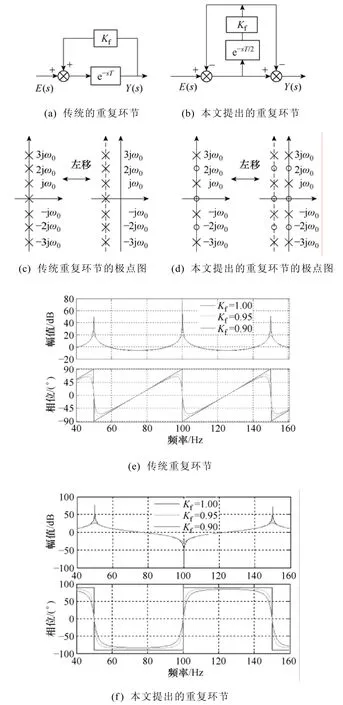
图7 传统重复环节和本文提出的重复环节的框图、零极点图和伯德图Fig.7 Block diagram,poles-zeros location and Bode plots
众所周知,由于对偶发性的干扰也存在无穷大增益,重复环节可能导致控制系统出现不稳定。本文在重复控制的延时环节之后引入了遗忘因子Kf,这样可以带来阻尼,提高了控制器的鲁棒性。Kf导致所有的极点向虚轴的左边移动一个距离σ,σ<0。对传统重复控制环节,极点移动的过程如图 7c所示,数学表达式如下:

对本文所提出的快速重复控制而言,Kf导致的极点移动过程如图7d所示,数学表达式如下:

在引入Kf之后,传统重复控制的框图和极点分布如图 7a、图 7c所示;Kf将系统的极点向虚轴的左半轴移动,因而增强了系统的稳定性。相对于传统的重复控制,本文所提出的快速重复控制具有以下优点:
(1)如图7f所示,不论Kf是否变化,本文提出的快速重复环节在相邻的两个奇次谐波对应的幅值增益尖峰之间,对偶次谐波有一个增益下陷,这就说明,它对奇次谐波有无穷大增益,对偶次谐波增益基本为零;相比之下,传统重复控制没有这个增益下陷的过程,最小幅值增益也大于 1/2 (−6.0 dB),表明它对任意次谐波的增益均为无穷大。所以,本文提出的控制策略增强了系统的选择性和抑制性,使之具有更大的增益和更好的表现。
(2)图7e和7f表明,在Kf从1减小到0.9的过程中,受Kf的影响,幅值增益尖峰的幅值减小,带宽增加。在传统重复环节中,幅值增益尖峰从无穷大变化为:最大值1/(1−Kf),最小值 1/(1+Kf);在本文提出的快速重复环节中,幅值增益尖峰从无穷大变化为:最大(1+Kf)/(1−Kf),最小(1−Kf)/(1+Kf)。由此可见,为了改善系统的鲁棒性而引入Kf后,本文提出的快速重复控制比传统重复控制具有更大的增益和更好的适应性。
为了消除开关次纹波对控制系统的影响,提高系统的稳定性,另一种有效的方法是在重复控制的延时环节之后加一个简单的一阶滤波器,例如LPF=1/(τs+1)。在一般的APF控制系统中,电流检测环节的低通滤波器可以有效地去除高频开关次谐波,所以 Kf取 0.95即可保证系统的稳定性,不需要在重复环节中增加LPF[14]。
5 仿真和试验
5.1 仿真
为了证明本文提出的快速重复控制的有效性和正确性,采用Matlab/Simulink建立了基于传统重复控制和本文提出的快速重复控制的APF仿真模型。APF的系统构成如图8所示,各元件参数见下表,仿真结果如图9所示。
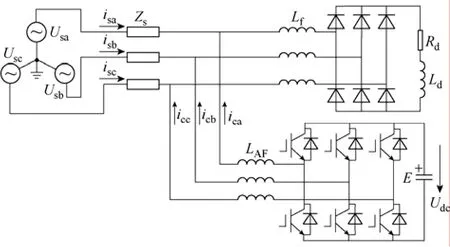
图8 APF的系统构成Fig.8 Configuration the APF system

表 仿真参数Tab.Simulation parameters

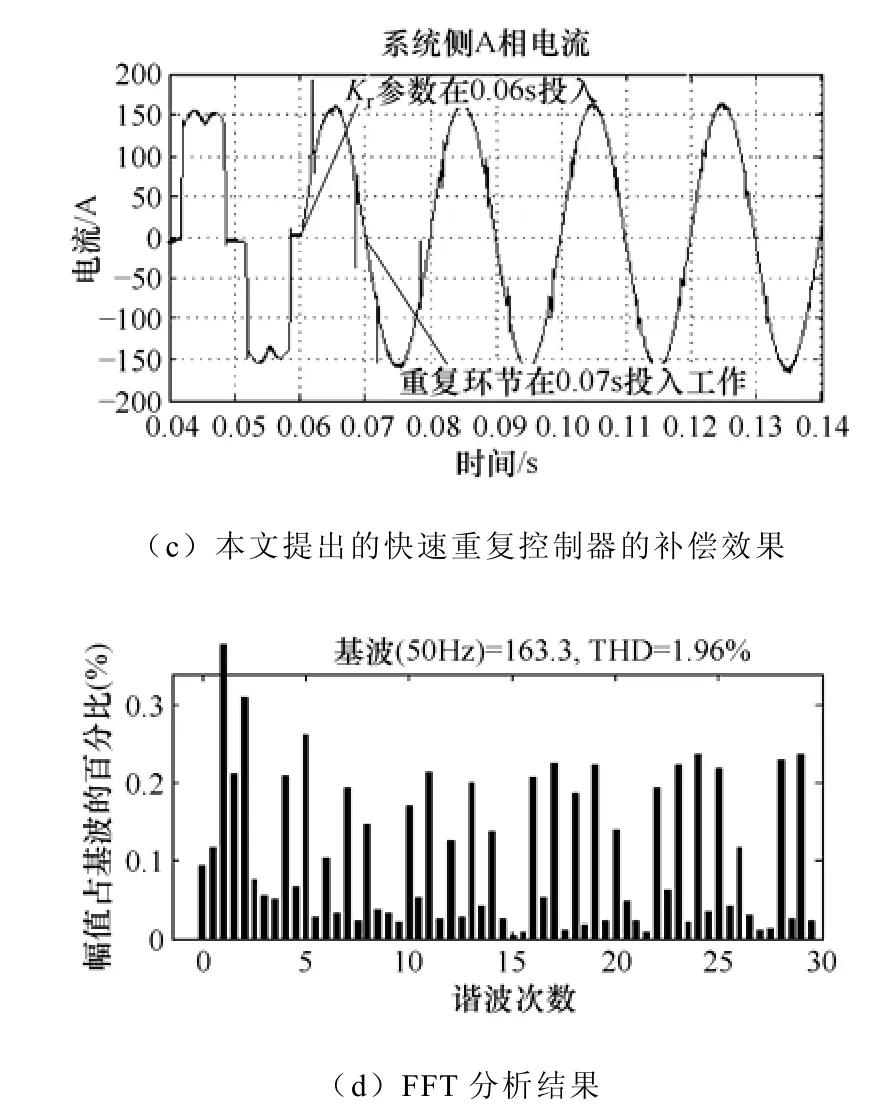
图9 Matlab仿真结果Fig.9 Simulation results
在基于传统重复控制器策略的仿真中,APF在0.06s开始工作。在控制器开始工作之后的第一个工频周期(0.06~0.08s)内,重复环节还没有起作用,系统侧电流有四个明显的畸变尖峰。在第二个工频周期(0.08~0.1s),重复环节开始起作用,系统电流上的四个畸变尖峰开始变小。当控制系统达到稳定状态时,总谐波畸变率减小到2.20%。
在基于本文提出的快速重复控制策略的仿真中,APF在 0.06s开始工作,在头半个工频周期(0.06~0.07s)中,重复环节也没有起作用,系统电流有两个明显的畸变尖峰,在第二半个工频周期(0.07~0.08s)重复环节开始起作用,系统电流上的两个畸变尖峰开始变小。当控制系统达到稳定状态时,总谐波畸变率减小到1.96%。
5.2 实验结果
为了验证所提出的控制策略的有效性,对比它相对传统重复控制的优越性,特在一台 100kVA并联APF上分别试验了这两种控制方法。APF的控制系统是由DSP+FPGA构成,FPGA主要完成A-D采样控制、谐波电流检测、重复控制的实现、直流侧电压控制、PWM脉冲的生成等功能;DSP主要完成装置的各种保护、数据分析、人机交互。实验结果如图10所示。

图10 实验结果Fig.10 Experiment results
在没有补偿之前,系统谐波电流有45A,THD为34.5%;采用传统重复控制,THD降低到5.24%,采用本文所提出的快速重复控制,THD降低到5.06%。
6 结论
本文提出了一种快速重复控制策略,建立了其控制框图和传递函数,推导出其收敛表达式,通过收敛性分析证明了本文提出的快速重复控制策略是稳定的,并在收敛速度、稳态误差等方面和传统重复控制进行了对比。为提高重复控制在偶发性干扰存在下的鲁棒性,控制系统需要引入遗忘因子Kf,本文从伯德图和幅值增益等方面分析对比证明了这种控制策略比传统重复控制具有更好的适应性。
理论分析和仿真、实验都表明:这种控制策略可以消除所有奇次谐波;相比传统重复控制,这种控制策略具有更快的收敛速度和更小的稳态误差。
在实际应用中,这种控制策略很容易由DSP或者FPGA实现。本文提出的快速重复控制策略已经成功地应用在三相并联APF系统中,通过进一步的设计、分析,它也可以应用在DVR、UPS、PV、SVG等其他并网逆变器当中。
[1]王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京: 机械工业出版社,2005.
[2]Shlabbach J,Blume D,Stephanblome T.Voltage quality in electrical power systems[M].England:Insped IEE,2001.
[3]Kazmierkowski M,Rishnan R,Blaabjerg F.Control in power electronics: selected problems[M].US:Academic Press,2002.
[4]Zmood D N,Holmes D G,Bode.Frequency domain analysis of three-phase linear current regulator[J].IEEE Transactions on Industry Applications,2001,37(2): 601-610.
[5]Zmood D N,Holmes D G.Stationary frame current regulation of PWM inverters with zero steady-state error[J].IEEE Transactions on Power Electronic,2003,18(3): 814-822.
[6]Yuan W X,Allmeling J.Stationary frame generalized integrators for current control of active power filters with zero steady-state error for current harmonics of concern under unbalanced and distorted operating conditions[J].IEEE Transactions on Industry Applications,2002,38(2): 523-532.
[7]Mattavelli P.A closed-loop selective harmonic compensation for active filters[J].IEEE Transactions on Industry Applications,2001,37(1): 81-89.
[8]Kauraniemi J,Laakso T I,Hartimo I.Delta operator realizations of direct-form IIR filters[J].IEEE Transactions on Circuits System,1998,45(1): 41-51.
[9]Santolo M,Perfetto A.Comparison of different control techniques for active filter applications[C].Fourth IEEE International Caracas Conference on Devices,Circuits and Systems,Aruba,2002: 17-19.
[10]Zha X M,Tao Q,Sun J J.Development of iterative learning control strategy for active power filter[C].IEEE CCECE'02,Winnipeg,Manitoba,2002,1:245-250.
[11]Teodorescu R,Blaabjerg F.A new control structure for grid-connected PV inverters with zero steady-state error and selective harmonic compensation[C].IEEE Applied Power Electronics Conference and Exposition,2004: 580-586.
[12]Teodorescu R,Blaabjerg F,Liserre M.Proportionalresonant controllers and filters for grid-connected voltage-source converters[J].IEE Proceedings Electric Power Application,2006,153(5): 750-762.
[13]查晓明,孙建军,陈允平.并联型有源电力滤波器的重复学习Boost变换控制策略[J].电工技术学报,2005,20(2): 56-62.Zha Xiaoming,Sun Jianjun,Chen Yunping.An integrated learning boost converter control strategy for PWM-VSI based active power filter[J].Transactions of China Electrotechnical Society ,2005,20(2): 56-62.
[14]Escobar G,Valdez A A,Leyva-Ramos J,et al.A repetitive-based controller for UPS Inverter to compensate unbalance and harmonic distortion[J].IEEE Transactions on Industrial Electronics,2007,54(1): 504-510.
猜你喜欢
科教导刊·电子版(2022年5期)2022-03-19
北京航空航天大学学报(2021年6期)2021-07-20
汽车维修技师(2019年7期)2020-01-16
电子制作(2019年19期)2019-11-23
测控技术(2018年7期)2018-12-09
电子制作(2018年19期)2018-11-14
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25
光学精密工程(2016年4期)2016-11-07
新高考·高一物理(2014年4期)2014-09-17
