基于ADAMS和ANSYS的刚柔耦合模型分析
2011-07-09 13:31彭礼辉阳贵明刘领化
湖南工程学院学报(自然科学版) 2011年3期
彭礼辉,李 光,阳贵明,刘领化
(湖南工业大学机械工程学院,株洲412008)
0 引 言
机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),是美国MSC公司开发的虚拟样机分析软件.在ADAMS中可以建立机械系统的运动学、动力学模型,其模型主要为刚性体,也可以是柔性体,还可以是刚柔耦合模型[1][2].有限元分析(Finite Element Analysis)的基本概念是用较简单的问题代替复杂问题,然后再求解.ANSYS软件是一款集结构、热、流体、电磁及多物理场耦合为一体的大型通用有限元分析软件[3].其基本分析过程分3步:前处理(Preprocessor);施加载荷与求解(Solution);后处理(Postprocessor).
ADAMS是目前最具权威的机械系统动力学仿真分析软件,分析对象主要是多刚体.ANSYS是一种大型通用有限元分析软件,其主要功能是对柔性体进行有限元分析.
大多数情况下,把样机当做刚性系统来处理都可以满足要求.但在一些需要考虑构件变形的特殊情况下,完全把模型当做刚性系统来处理还不能达到精度要求,还必须把模型的部分构件做成可以产生变形的柔性体来处理[4],因此,最好将两种软件结合使用.
1 ADAMS软件与ANSYS软件的结合
在动力学仿真软件ADAMS中进行仿真分析,可以得到所需要的载荷文件(即.lod文件),这就为ANSYS有限元软件进行分析提供了载荷谱、位移谱等信息.然后在ANSYS中利用得到的载荷谱信息作为边界条件,就可以完成应力、应变的分析[5][6].这样一来,在基于精确动力学仿真结果基础上得到的应力和应变结果更加准确,提高了计算精度.
另一方面,利用ANSYS进行有限元分析时,可以得到ADAMS使用的模态中性文件(即.mnf文件),就生成了模型中的柔性体,建立一个刚柔耦合模型.这种考虑了弹性特征的动力学模型,仿真精度大大提高.两者之间的数据传递方式如图1所示.

图1 ADAMS和ANSYS之间的数据传递
2 ANSYS和ADAMS结合使用实例
如图2所示的机构为用于夹紧登月舱和宇宙飞船的夹紧机构.该机构由5个构件组成:原动件手柄(handle)、从动件摇臂(pivot)、连杆(link)、锁钩100 N,通过摇臂和连杆的传动使得锁钩在大地平面上向右滑动(锁钩左端用一个线性弹簧的拉力来模拟夹紧力),进而将登月舱与宇宙飞船夹紧.
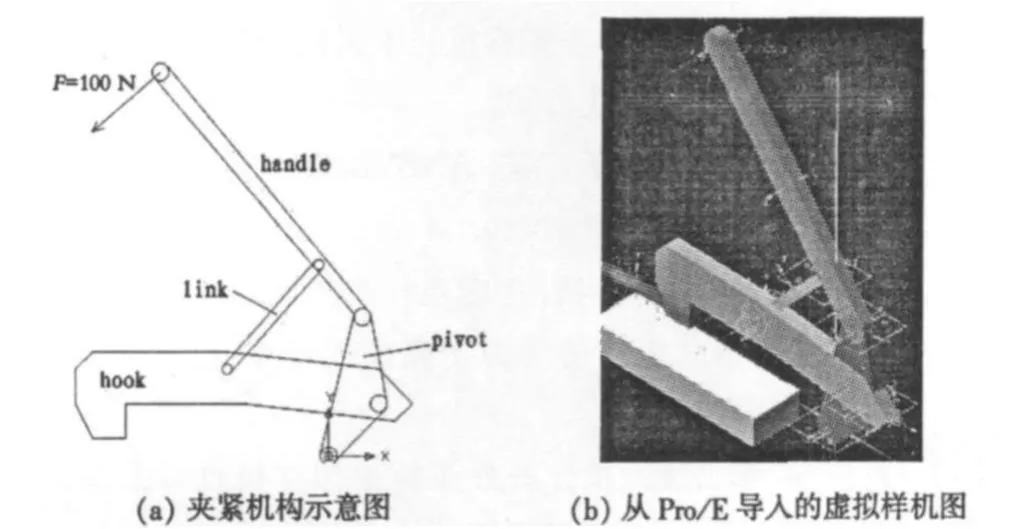
图2 模型示意图
2.1 刚性体模型的建立
首先,在从 Pro/E中建立机构的三维实体模型,进行装配后,通过从Pro/E和ADAMS的接口将模型导入ADAMS中,定义相应的约束和运动关系,生成刚性体模型[7],如图2(b)所示;然后设置好仿真时间和步长,利用ADAMS进行机构仿真分析,得到构件位移、速度曲线,仅以连杆位移、速度为例.如图3所示.限于篇幅,不一一列出.
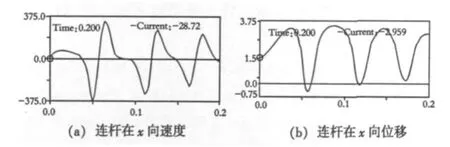
图3 连杆在x方向的速度和位移曲线图
进行完仿真分析以后,能够得到该夹紧机构中各个构件上指定点在全局坐标系 x、y、z方向上的加速度、作用力、速度、位移的分量曲线和合成曲线.
2.2 柔性体模型的建立
接下来把从动件摇臂作为柔性体考虑再进行动力学分析.首先对摇臂进行网格划分,然后进行模态分析、计算,把该结果保存为模态中性文件MNF(Modal Neutral File),最后读入到ADAMS中,代替刚性体摇臂,建立一个刚柔耦合模型,对相应部位施加驱动和约束,进行考虑了构件弹性特征的系统动力学仿真[8][9].具体参数设置:弹性模量1.17e11 Pa,泊松比0.3,密度为4500 kg/m3.对其进行自由网格划分(Free),得到该摇臂计算模型共有20049个节点,12455个单元.模态分析结果如表1所示.
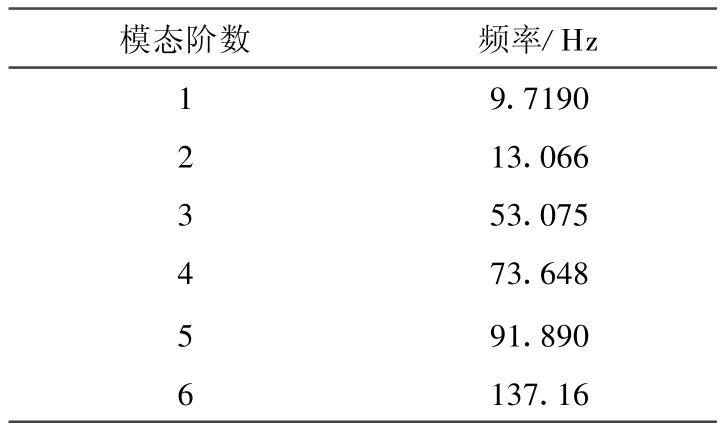
表1 摇臂模态分析结果
其中,摇臂第1阶、第6阶振型如下图4所示.
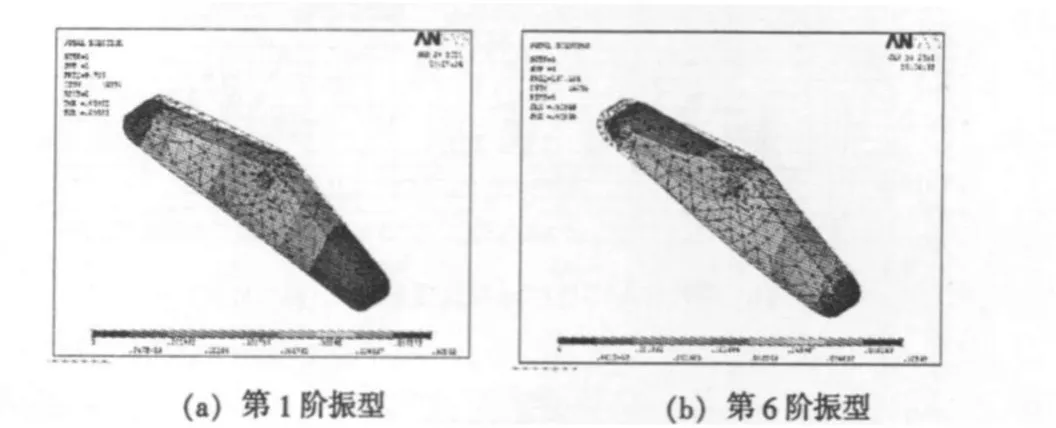
图4 摇臂振型图
2.3 刚柔耦合模型测试
建立好刚柔耦合模型后,设置好相关参数,在ADAMS下对此机构进行动力学分析,通过数据曲线来分析机构的运动性能[10].
当柔性体摇臂替代刚性体摇臂后,测量结果显示柔性体摇臂、连杆和锁钩三者几乎同步运动(如图5所示),与刚性体摇臂不同的是,用柔性体替换后,速度趋势变成了先反向加速(同样设向右为正),加速至最大速度后再减速,再正向加速至最大值后又减速.
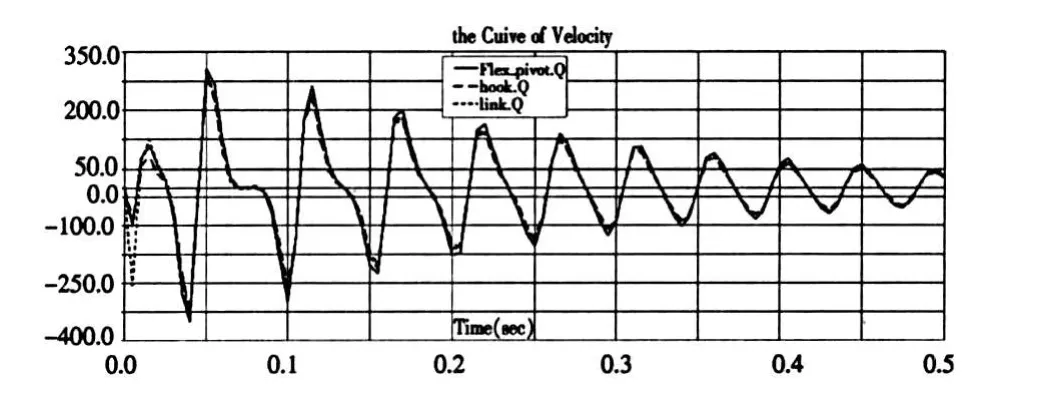
图5 柔性体摇臂、连杆与锁钩速度曲线图
接下来把刚性体和柔性体摇臂的运动进行对比.从图6(a)可以看出,在力 F=100 N 时,刚性体摇臂与柔性体摇臂的速度变化趋势相似,但是滞后性显著,相差较大;当力增加到F=200 N时,其速度曲线如图6(b)所示,其速度变化趋势更加相似,并且滞后性明显减小,相差不大;当力继续增加到F=300 N时,刚、柔性体摇臂的运动变化几乎一致,如图6(c)所示(但是,力F并不是越大越好,具体情况这里不再作介绍).

图6 不同力时的刚性体与柔性体摇臂速度曲线比较图
3 小 结
利用机械动力学仿真软件ADAMS和有限元分析软件ANSYS联合仿真,完成了一个刚柔耦合模型的对比分析.在该夹紧机构中,柔性体对机构运动精度以及机构寿命产生了很的大影响.把摇臂构件用柔性体替代后,在ADAMS中利用虚拟样机技术进行动力学仿真证明了这一结论.很明显,这种影响是不能够忽视的.
[1]郑建荣.ADAMS-虚拟样机技术入门与提高[M].北京:机械工业出版社,2002.
[2]刘 伟,高维成,于广滨.ANSYS12.0宝典[M].北京:电子工业出版社,2010.
[3]张劲夫,许庆余,张 陵.考虑连杆柔性和运动副粘性摩擦的曲柄滑块机构的动力学建模及计算[J].2001,22(3):274-276.
[4]肖国伟,李 光.柔性杆件系统虚拟样机设计及其动力学仿真分析[J].湖南工业大学学报,2009,23(4):62-64.
[5]郭卫东.虚拟样机技术与ADAMS应用实例教程[M].北京:北京航空航天出版社,2008.
[6]刘国庆,杨庆东.ANSYS工程应用教程[M].北京:中国铁道出版社,2003.
[7]丁寿滨,常宗瑜,武雅洁,等.ADAMS与常用CAD软件之间的接口[J].微计算机信息,2005,21(30):202-204.
[8]林国英,李 光,刘少义.弹性四连杆机构动力学响应的数值求解[J].湖南工业大学学报,2008,22(4):105-108.
[9]ZHENG Xiao-ya,YOU Jun-feng,ZHANG Duo,et al.Application of ADAMS and ANSYS to Mechanism A-nalysis[J].Journal of Solid Rocket Technology,2010,33(2):201-204.
[10]刘治波,禹宏云.Pro/E、ADAMS与 ANSYS在虚拟设计中的联合应用[J].机械工程与自动化,2008,18(2):48-53.
猜你喜欢
金属加工(冷加工)(2023年1期)2023-02-04
石油矿场机械(2022年3期)2022-06-17
当代陕西(2022年5期)2022-04-19
再生资源与循环经济(2021年7期)2021-04-09
水泥工程(2020年4期)2020-12-18
装备制造技术(2020年2期)2020-12-14
河南科学(2020年3期)2020-06-02
汽车实用技术(2017年16期)2017-09-21
制造技术与机床(2017年3期)2017-06-23
河南工学院学报(2017年1期)2017-06-07