
基于电压调制的永磁容错电机转矩控制系统仿真
2011-06-19 03:00:50沈天珉胡育文郝振洋黄文新
微特电机 2011年3期
沈天珉,胡育文,郝振洋,黄文新
(南京航空航天大学,江苏南京210016)
0 引 言
近年来,多电飞机以及电动汽车得到大力发展,这对飞机电力作动器和电动汽车驱动系统提出了更高的要求,即要具有高的安全可靠性和容错性[1-3]。
永磁容错电机除了具有一般永磁电机体积小、功率密度大和转矩脉动小的特点之外,还具有很强的故障隔离和容错特性。它可以实现相与相之间的电气隔离、磁隔离、物理隔离和热隔离功能,同时保证每相绕组具有较大的电感值,可以抑制短路电流,保证短路相不会对其他正常相工作造成影响[5]。
本文对永磁容错电机和转矩控制算法原理进行了分析,基于永磁容错电机和该控制算法,利用电压调制来实现对转矩的控制,并对其进行了建模和仿真验证。
1 永磁容错电机及其数学模型
永磁容错电机在电机结构上进行了特殊的设计,从而具备故障隔离和抑制短路电流的特性。一台六相十极容错电机模型如图1所示,每相绕组采用集中式绕组隔齿绕制,定子齿采取极靴结构,可以保证各相间的物理隔离、磁隔离、热隔离,同时每相采用单独的H桥驱动,可保证电气隔离。通过电机设计,使绕组的电感接近单位标幺值,可有效抑制短路电流[5]。
永磁容错电机的各相绕组之间互感值近似为零,无磁路耦合。在推导数学模型之前做如下假设:
(1)磁路不饱和,磁滞和涡流损耗忽略不计;
(2)空间磁势及磁通成正弦规律分布;
(3)转子上没有阻尼绕组,永磁体没有阻尼作用;
(4)各相绕组空间对称,每相的电阻、电感值相等。以六相永磁容错电机为例,可得到电压方程:
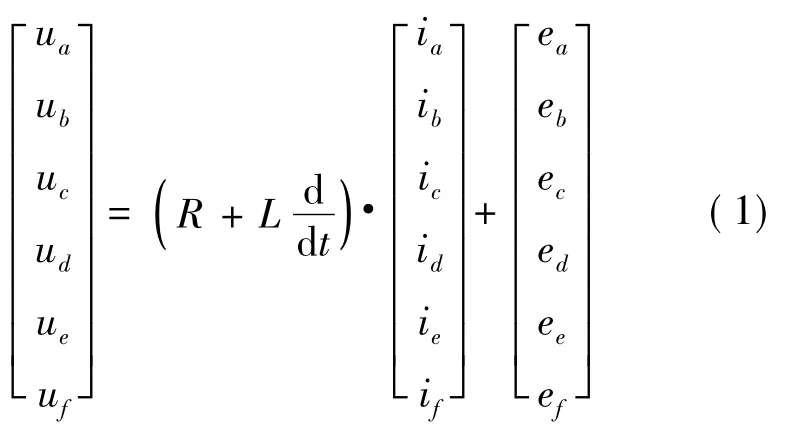

图1 六相十极永磁容错电机结构图
式中:R为相电阻;L为相绕组电感;ua、ub、uc、ud、ue、uf为六相绕组定子端电压;ea、eb、ec、ed、ee、ef为六相绕组反电势;ia、ib、ic、id、ie、if为六相绕组定子电流。
假设磁链在电角度为零时,A相绕组匝链永磁体磁链最大,则六相十极永磁容错电机的反电势方程:
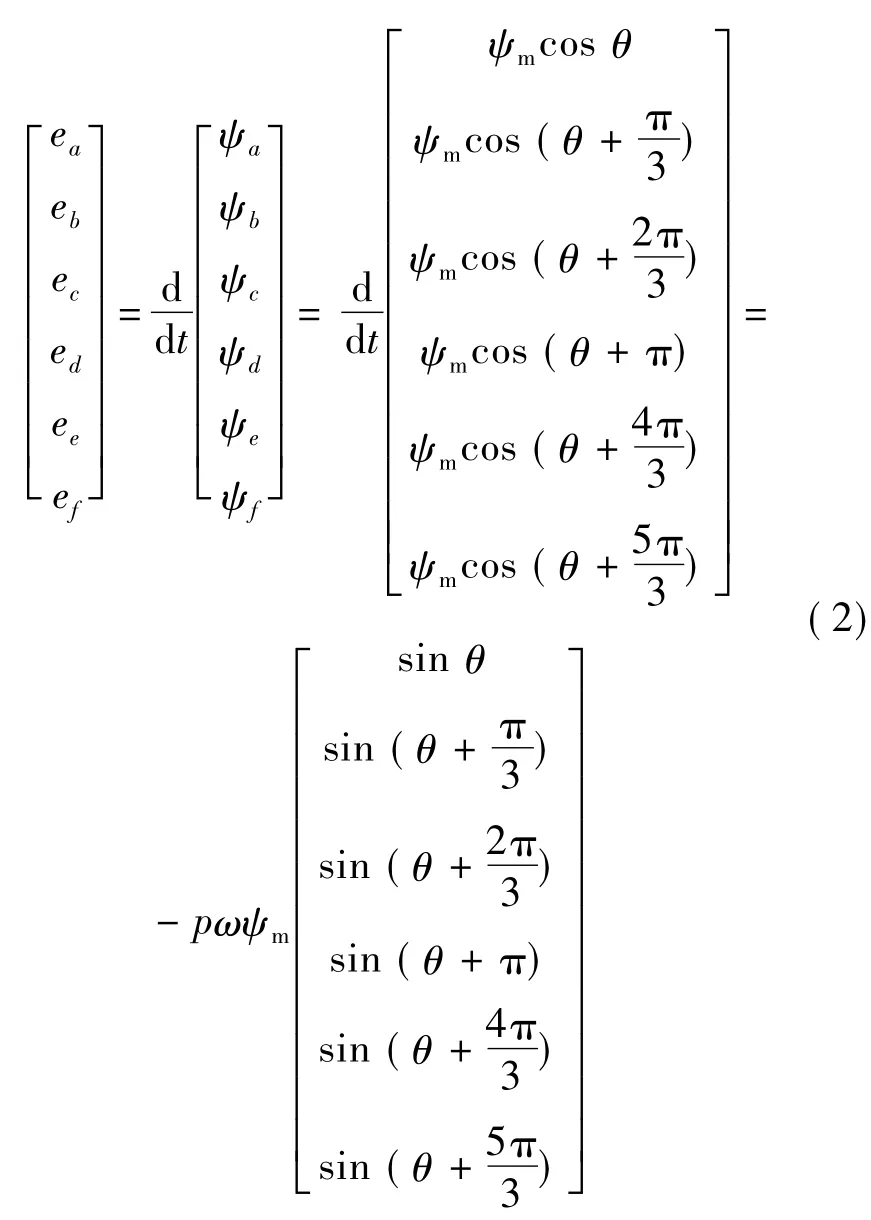
式中: ψa、ψb、ψc、ψd、ψe、ψf为六相绕组反电势磁链;ψm为永磁体磁链幅值;θ为电角度;p为转子极对数。
由功率平衡方程,得到电磁转矩Te:

式中:ω为机械角速度。
运动方程:

式中:TL为负载转矩;J为电机转动惯量。
2 基于电压调制的转矩控制策略
图2给出了基于电压调制的永磁容错电机转矩控制系统框图。外环为转速环,通过速度调节器得到转矩给定值Td,并将给定值Td送到转矩控制器,转矩控制器接收位置信号以及故障信号,通过转矩算法计算出各相需要的定子磁链给定值,然后通过电压调制,使各相的定子磁链跟踪给定磁链,实现系统的可靠以及一相故障容错运行。转矩控制算法分为正常和故障两种情况。
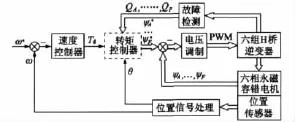
图2 基于电压调制的永磁容错电机转矩控制系统
2.1 各相正常时
最优转矩控制算法的目标是使输出转矩恒定,且定子铜损最小[4]:
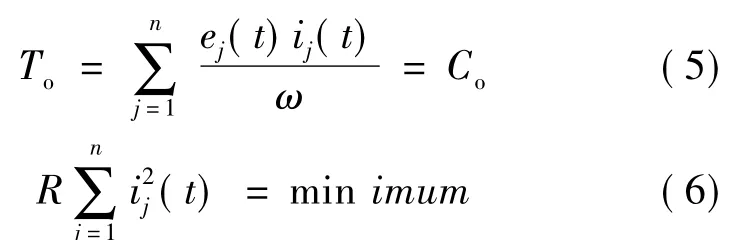
式中:ω为机械角速度;ej(t)为第j相瞬态反电势(j=1,2,…,n);ij(t)为第j相瞬态电流;To为电机电磁转矩;Co为常数。
根据以上两个条件,引入拉格朗日乘数λ,定义价值函数Y为:

Y满足以下条件:
求得各相电流表达式:

此时各相正常,电流表达式的分母为定值,各相电流为相位互差的正弦波。
在求得每相绕组给定电流后,根据式(10)可以求得每相定子绕组磁链:

式中:ψj为交链到第j相绕组的定子磁链;ψfj为磁钢磁链交链到第j相定子绕组中磁链;L为相绕组电感。
2.2一相绕组故障时
故障态的最优转矩控制算法与正常态时相似,但需加入故障处理,其控制目标:

式中:Tf(t)为故障相k产生的瞬态转矩。当第k相断路时:

当第k相短路时:

同样取定子铜损最小为约束条件:

根据以上两个条件,引入拉格朗日乘数λ,定义价值函数Y为:
当铜损取最小值时,Y满足以下条件
求得各相电流表达式
由式(17)可知,电机一相绕组故障时,最优转矩控制算法表达式分母是电角度的函数,由此计算出的正常相电流呈现非正弦。由于该永磁容错电机是按照反电势为正弦来设计,所以式(17)的分母项不会出现极值情况,不需要反复迭代求取最优电流。同样的,根据式(10)可以求出每相定子绕组的磁链,如此,则可以通过电压调制算法,实现对定子磁链的控制。由机电能量转换原理可知,通过对定子磁链的控制,可以实现对电机转矩的控制。
3 电压调制
每个控制周期中,预先计算出定子磁链需要的增量,如下式:

式中:Ts为控制周期。
在一个控制周期内,控制周期很短,可以认为转子位置基本不变,即ψfj(t+Ts)≈ψfj(t),因此可将式(18)简化为式(19),有:

永磁容错电机的每相绕组电压方程可写为下式:

如果忽略定子电阻,则有:

将式(21)改写为式(22),如下式:
由式(19)得到磁链增量,然后通过式(22)计算出一个周期内需要施加的电压的理论时间。在式(22)中,Δtj表示一个控制周期内第j相定子绕组上理论需要施加电压的时间,但由于控制系统为数字控制系统,一个控制周期内只能够改变一次PWM状态,所以要考虑在一个PWM周期内,绕组两端施加电压反向后的影响,因此,上面计算出的时间不是最终施加电压的时间,应该作如下处理:
ΔTj表示一个控制周期内第j相定子绕组上实际需要施加电压的时间,如果计算出的时间ΔTj大于控制周期Ts,则取控制时间为控制周期Ts的值,即 ΔTj=Ts。
4 仿真验证
为了验证系统的可行性,在Matlab/Simulink环境中建立仿真模型,以验证六相正常分别切换到一相短路和一相断路两种情况,为了便于比较,短路和断路故障均采用A相。整个控制系统包括故障诊断、转矩控制算法、电压调制算法和转速PI调节器四个部分。
仿真参数设置如下:负载转矩TL=1 N·m;给定转速n*=2 000 r/min;直流母线电压Udc=270 V;断路发生时刻0.02 s;短路发生时刻0.02 s;控制周期为62.5 μs。
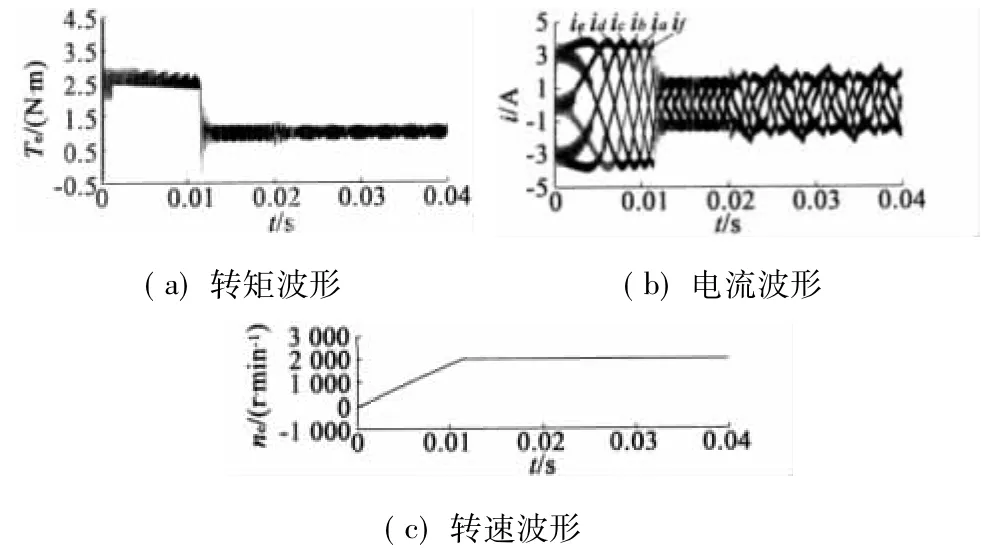
图3 A相断路情况下的波形
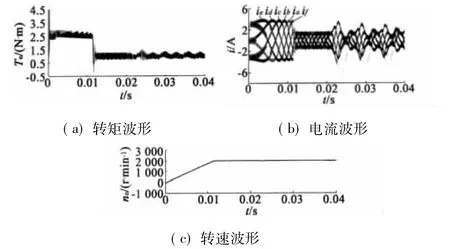
图4 A相短路情况下的波形
图3给出了A相断路故障前后的仿真波形,在0.02 s时A相发生断路故障,可以看出,在发生A相断路故障前,六相电流为依次互差60°电角度的正弦波,当发生故障后,电流变为不规则波形,且发生故障后,某些正常相电流会变大,以补偿平均转矩和抵消转矩脉动。整个过程中,转矩平均值较正常情况时不变,转矩脉动在正常态为28%,断路后为28.2%,转矩脉动在故障前后基本不变。转速在故障前后也都能够稳定在给定值 。图4给出了A相短路故障前后的仿真波形,控制周期为62.5μs,在0.02 s时A相发生短路故障。故障前,各相电流均为正弦波,当A相出现短路故障后,某些正常相电流会变大,以补偿平均转矩和抵消脉动转矩,转速在故障前后都能够稳定在给定值。转矩脉动在正常态为28%,短路后为30%,转矩脉动在故障前后变化不大。短路相电流的直流分量呈指数衰减至零,稳定后短路相电流为周期性变化的正弦波,且只比额定值稍大,为额定值的1.2倍,这是由于永磁容错电机的电感标幺化设计具有抑制短路电流的能力[5]。
5 结 语
本文对永磁容错电机和转矩控制算法进行了分析,提出基于电压调制的转矩控制方法,建立了与实际情况基本一致的仿真模型。仿真结果验证了算法的正确性,能够实现一相短路或断路容错运行,且转矩、转速性能与正常态相比基本不变。
[1]Anthony S.The development of a highly reliable power management and distribution system for transport air-craft[J].AIAA,1994,12(8):1-6.
[2]Joseph A,Weimer A.Power technology for the more electrical aircraft[R].Aerospace design conference,AIAA,93:16-19.
[3]郝振洋,胡育文,黄文新.电力作动器中永磁容错电机及其控制系统的发展[J].航空学报,2008,29(1):65-74.
[4]Edu J D,Atallah K,Wang J B,et al.Modular Fault Tolerant Permanent Magnet Brushless Machines[J].IEE Proceedings of Power Electronics,Machines and Drives,2002,487:415-420.
[5]郝振洋,胡育文,黄文新,等.电力作动器中永磁容错电机的电感和谐波分析[J].航空学报,2009,30(6):1063-1069.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2014年21期)2014-04-04 12:32:08
电测与仪表(2014年23期)2014-04-04 12:08:30
